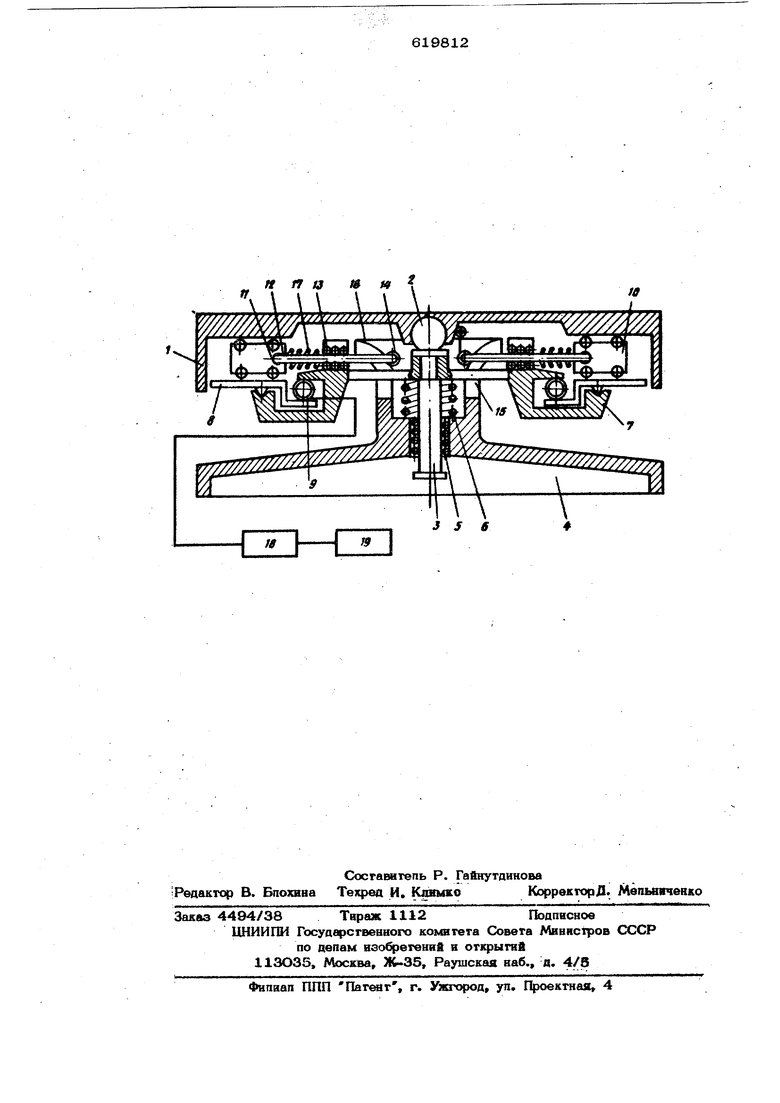
Изобретение огносигся к обпасти иэмеригепьной техники и можег быть исполь зовано для опредепения координат центра тяжести издепий, произвольной формы и дп определения центра давлений на плоскую платформу. Известно устройство для определения положения тяжести изделия, содержащее Ш1а ;форму для изделия, опирвется на четыре чувствительных элемента, расположенных попарно в двух взаим- но перпендикупщ ных направлениях симмет рично оси платформы, соединенных в измерительные цепи и выполненных в виде тенаодагчнков . Недостатком устройства является то, чго ток в измерительных аепях меняется пропорционально отклонению центра тяжести изделия и его весу, что вносит дополнительные погрешности в измерения, снижая таким образом их точность, и приводит к необходимости тарнровкя устройства дпя каждого изделия, снижая производительность процесса. Наиболее близким по технической сущности к предлагаемому изобретению является устройство дпя опредепения положения центра тяжести изделия, содержашее основание, установленный в центре основания с возможностью перемещения в вертикальном направлении подпружиненный шток, ппатформу для изделия, размешенную на штоке, и плиту, жестко связанную со штоком 2 . Определение центра тяжести изделий осуществляется путем перемещения ура& новешивакяцих грузов, установпенных на f платформе. Этими же грузами регутфуют чувствительность системы. Специальные грузы, вмонтированные в тепо, компенсируют дисбаланс системы. Недрстатком устройства является Невысокая точность измерений кэ-зй невысокой чувствительности, системы к вебопь. шим отклонениям центра тяжести системы. Целью изобретеиня является повышение точности измерений. Для этого предлагаемое устройство снабжено втулкой с гиперболической вну1 ренней поверхностью) соосно с ппатформой усгановпенной на основании, четырьмя чувствигепьными элементами, распопожен- ными попарно в двух взаимно периендикупярных направпениях симметрично оси пла формы, каждый из которых выполнен в виде рычага, тензоэпемента, расположенного между рычагом и ппитой, катка, уста {овпенного на рычаге с возможностью пе ремещения в .ториаонтааьной плоскости, по пружинённой тягн, ось которой перпенди- купярна оси платформы, один конец тяги связан с катком, а другой - контактирует с внутренней поверхностью втулки. На чертеже изс ражено устройство, o6i ший вид. Устройство для определения положения центра тяжести издепяя содержит платформу 1 для изделия, размещенную на сфери ческой головке 2 подпружиненного штока 3, установленного в центре основания 4 с возможностью перемещения в вертикаль ном направлении по иаправпяюшей 5 качения н передающего давление изделия пру жине 6. Со штоком 3 зкестко связана плига 7, Устройство содержит также четыре чувствительных элемента, расположенных nonfqpHO в двух взаимно перпендикулярных направлениях симметрично оси плвтформь( 1, каждый из которых выполнен в виде рычага 8, тензоэлемента 9, расположенного между рычагом 8 и плитой 7, катки Ю, установленного на рычаге 8 с воз- ; Можностью перемещения в горизонтальной плоскости. В вертикально расположенном пазу 11 катка 1О крепится конец подпружиненной тяги 12, имеющей направляющую 13качения и ролик 14, при этом ось тяги 12 перпендикулярна оси платформы 1| соосно с которой установлена втулка 15 с шперболической внутренней поверхностью 16, с которой контактирует ропик 14тяги 12, прижимаемой к ней при помощи пружины 17 . Каждая пара тензоэлементов 9 соединена в отдельную измерительную цепь 18, связанную с двухкоординатным потенциометром 19.. Устройство работает следукицим обра зом. Изделие устанавливают на платформу 1, которая под действием его веса давит через; сферическую головку 2 на щток 3 и перемещается вниз до тех пор, пока вес изделия не уравновесится пружиной 6. Тек как пружина 17 обеспечивает непрерывный контакт ролика 14 с неподвижной гип бопическрй поверхностью 16, а пли та 7 жестко связана со штоком 3 посред-г ством перемещения ропика 14 по гипербопической поверхности 16, то вертикап ное перемещение штока 3 приводит к ro-i риаонтапьному перемещению катка Ю по ппечу рычага 8. Так как паа 11 не ограничивает движен11я катка 1О в гхэриаонтапьном ваправпении, то сипа, действующая на каток Ю, передается на рычаг 8 без изменения, образуя момент, которьШ мен5 ется пропорционально скрещению центра тяжести изделия. Усилия, воспринимаемые тензоэлементами 9, преобразуются в электрический сигнал, пропорциональный смещению центра тяжести изделия, который регистрируется на потенциометре 19. Благодаря наличию втулки с гиперболической поверхностью осуществляется высокая точность преобразования вертикального перемещения в горизонтальное, что повышает точность измерений и балансировки, при этом электрический на выходе электрической схемы пропорционален только смещению центра TJDжесги и не эависиг от изменения веса изделия, что также повышает точность балансировки. Формула изобретени Устройство для определения положени. центра т$1жести изделия, содержащее оо нование, установленный в ценфе основа-г ния с возможностью перемещения в вертикальном направлении подпружиненный щток, платформу для изделия, размещенную на щтоке, и плиту, жестко связанную со штоком, отличающееся тем, что, с целью повьпиения точности опрёде ления, оно снабжено втулкой с гипербо лической внутренней поверхностью, уста-. новленной на основании по центру плат формы, четырьмя чувствительными эпе« ментами, расположенными попарно в двух взаимно перпендикулярных направлениях симметрично оси платформы, каждый из которых выполнен в виде рычага, тенаог элемента, расположенного между рычагом н плитой, катка, установленного на рыча ге с возможностью перемещения в гори- зонтапьыой плоскости, подпружиненной Т9- ги, ос| которой перпекдикупярна оси nne|i формЕы, один конец тяги связан с катком, а щ}угой контактирует с внугренней поверхностью втулки. Источники информации, принятые во внимание при вкспертвае: 1.Авторское свидетельство СССР. № 337115, А 61 В 5/1О, 197О. 2.Авторское свидетельство СССР № 303288, кп. G О1 М-1/12. 1968, П П 13 CZJ-IIZJ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовый конвейер | 1986 |
|
SU1413046A1 |
| Устройство для подготовки радиоэлементов к монтажу | 1985 |
|
SU1314489A1 |
| Устройство для резки листов изблОКОВ пЕНОплАСТА | 1974 |
|
SU797888A1 |
| Устройство для шаговой подачи изделий | 1975 |
|
SU564057A1 |
| Устройство для отбортовки | 1981 |
|
SU1021496A2 |
| ИНЕРЦИОННАЯ ВАГОНОРАЗГРУЗОЧНАЯ УСТАНОВКА | 1971 |
|
SU310852A1 |
| Станок для отрезки литников | 1977 |
|
SU738763A1 |
| Устройство для укладки плоских изделий в стопу | 1989 |
|
SU1715694A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| Устройство для механической обработки пластмассовых изделий в форме тел вращения | 1984 |
|
SU1260228A1 |