зонтальных осях 15 рычагов-лротизозесоз- верхнего 16 и нижнего 17. На верхнем рычаге-противовесе 16 образован вырез IS, а на нижнем смонтирован входящий в зырез 18 штырь 19. На ось 15 каждого рычагапротивовеса насажен упругий элемент, зыттолненный в виде пружия 20 возврата, одним концом связанный с рыча1гом-противовесом, а други.м взаимодействугоидий с закреплевной на направляющей стойке 8 упором 21.
Для ограничения хода вниз верхнего рычага-противовеса 16 .на -направляющей стойке 8 3:акреплен ограничитель 22.
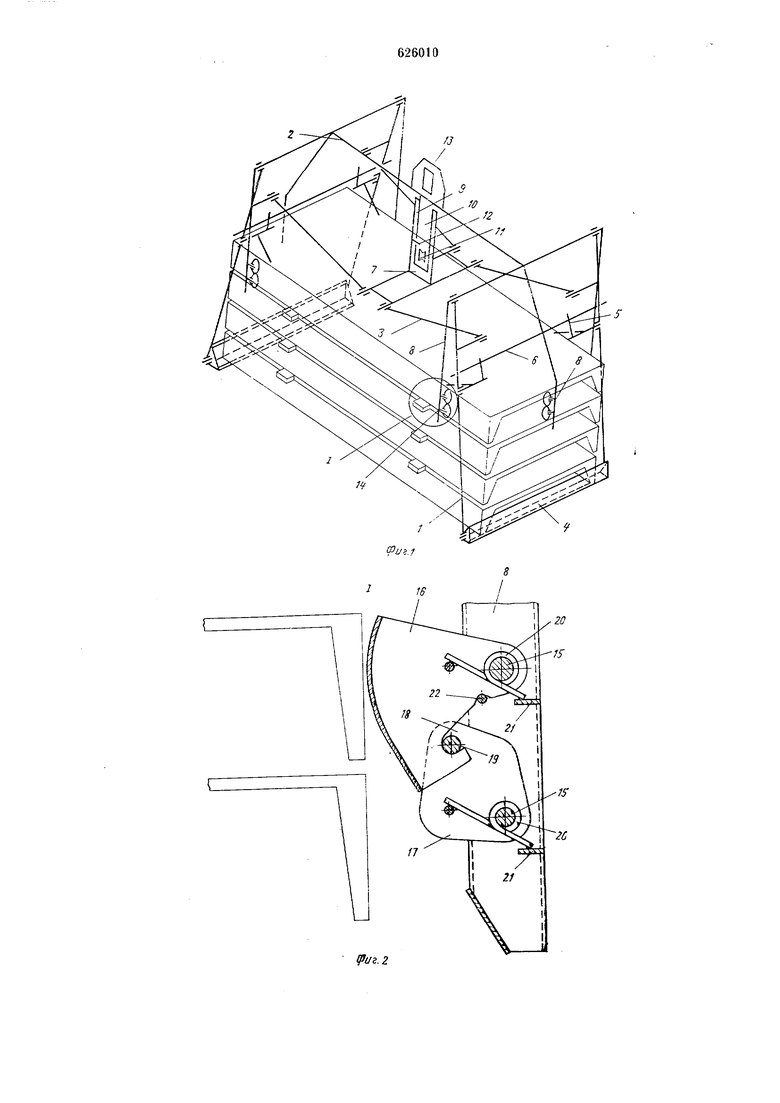
Захват работает следующим образом.
Носле ориентации захвата над лакетом изделий с 1помощью ограничительных упо.ров (в первоначальный момент с верхним изделием пакета может контактировать «ижний рычаг-лротиво;вес 17) захват опускают до пол.ного опи.рания на лакет.
Когда захват опускают на пакет из узких и коротких изделий, с наружными гранями последних контактирует верхний рычаг-противовес 16, после чего захват опускают до полного апирани-я на верхнее изделие упорами 5, пока не сработает механизм 7 фиксации. При этом упор 12 поворачивает звездочку //, которая в ко.нце хода лолзуна Ю занимает горизонтальное положение.
Затем начинают подъем захвата.
При подъеме ползун 10, перемещаясь в корпусе 9, ловорачивает звездочку // ,в вертикальное положение, при этом ОНа не препятствует перемещению ползуна 10 относительно корпуса 9.
При перемещении лолзуна 10 ззерх одновремевно поднимается жестко соединеНная с ни,м подвеска 2, захватные органы 4 сводятся « посредством тяг / ловорачива.ется система рычагов 5. Подъем пакета изделий и его тралспортировку производят, когда захватные органы 4 окончательно
переместятся до конта кта с нижним изделием пакета.
При опускании захвата на пакет с широкими и длинными изделиями вначале с верхним изделием контактирует -нижний рычаг-лротивовес 17. По вдере олускания захвата на пакет рычаг-противовес 17 выводится из выреза 19 верхнего рычага-протизовеса 16, вследствие чего последний освобождается. При дальнейшем опускании захвата автоматически, при контакте с изделиями, отводится верхний рычаг-противовес 16, поворачиваясь .на оси 15, и захзарные орга.ны 4 свободно перемещаются вниз, пока захват упорами 5 не сконтактирует с верхним изделием пакета. После этого происходит срабатывание соответствующих узлов и деталей захвата, как олисано выше.
Формула изобретения
I. Автоматический захват для железобетонных изделий по авт. св. 509515, о тл и чающийся тем, что, с целью улучшения .процесса ориентации устройства при наведении на пакеты изделий разл ичной длины и ширины, на подвеске дополнительно закреплены направляющие стойки, в нижней части ка.ждой из которых смо-нтирова.ны верхний и нижний ограничители, вьтолненные из установленных друг под другом на горизонтальных осях рьиаговпротив.овесов, на верхнем из которых образован вырез, а на нижнем - взаимодействующий с вырезом штырь, причем на ось каждого рычага-противовеса насажен ynipyгий элемент, взаимодейст.зующий с закрепленным на направл-яющей стойке упором.
2. Захват по п. 1, отличающийся тем, что на каждой направляющей стойке закреплен ограничитель хода верхнего ры- чага-противовеса.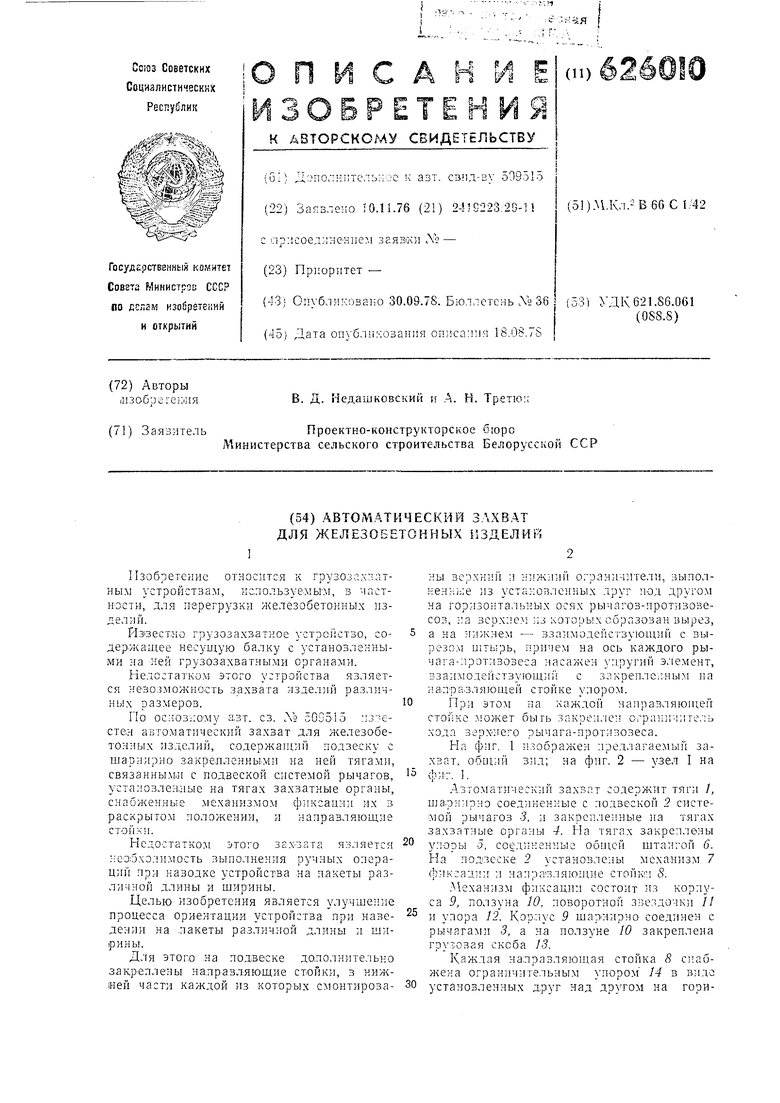
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для кабин | 1984 |
|
SU1221176A1 |
| Автоматический захват для железобетонныхизделий | 1973 |
|
SU509515A1 |
| Автоматический захват для железобетонных изделий | 1991 |
|
SU1785988A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Автоматическое захватное устройство | 1971 |
|
SU549400A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| Захватное устройство для длинномерных грузов | 1977 |
|
SU715426A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |