(54) СИСТЕМА УПРАВЛЕНИЯ СХВАТОМ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| ВСЕСОЮЗНАЯт:^птшггшйЧЕв||АвторыI ;высшее техническое училище им. Н. Э. Баумана | 1973 |
|
SU389922A1 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Устройство для управления схватом манипулятора | 1980 |
|
SU949628A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
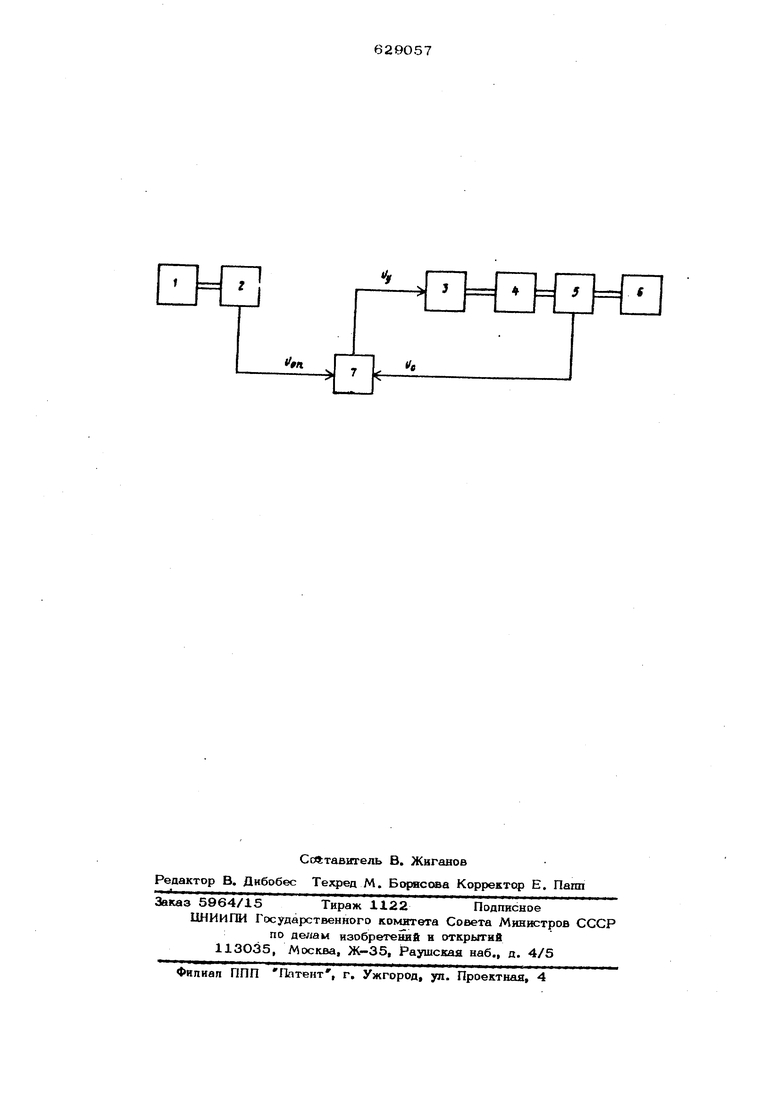
Изобретение относится к универсальны промышленным или специализированным манипуляторам, управля мым человекомоператором. Известна система управления, позволяющая оператору управлять схватом ман пулятора и ощущать усилия, развиваемые в схвате, и состоящая из задающей части, содержащей привод для воспрои ведения усилия, развиваемого в схвате, связанный необратимой механической пе- редачёй с задающим устройством, с которым работает оператор, датчик усилия оператора и датчик положения задающего устройства, и исполнительной части, содержащей исполнительный привод, связанный механической передачей с испопнительным устройством, датчик усилия схва та манипулятора и датчик положения исполнительного устройства, и логического устройства, один вход которого соединен с датчиком усилия схвата,. второй - с датчиком усилия оператора, а выход подключен к входу привода задающей :части Выходы датчиков положения задающего и исполнительного устройств соединены с входами исполнительного привода l3. Известная система имеет большой вес и габариты задающей части. Целью изобретения является уменьшение веса и габарита задающей части системы управления схватом манипулятора. Для этог -) в предлагаемой системе выход, погического устройства подключен к входу исполнительиого привода, снабжетюго необратимой механической передачей. При этом привод для воспроизведения усилия в схвате с необратимой механической передачей, датчик положения задающего устройства в задаютпей части и датчик положения исполнительного устройства в исполнительной части исключаются из системы. На чертеже дана структурная схема системы управления схватом манипулятора. Предлагаемая система управления состоят из задающей частн, выполненной в виде задающего устройства 1, соеди36290574
пенного с датчиком 2 усилия оператора,ческого устройства будет пропорционален
иснолнительцой части, содержащей испол-нриложенному оператором ycimviro на занительный привод 3 с необратимой меха-дающем устройстве ОП ®
нической передачей 4, соединенный черезтого чтобы привести в движение испол-
датчик 5 усилия в схвате с исполнитель- 5нительное устройство схвата оператор ным устройством 6, и логического устройства 7, один вход которого соединен с датчиком усилия (/ператора, а второй с датчиком усилия в схвате. Выход логического устройства соединен с входом исполнительного привода 3. С датчика 2 и с датчика 5 снимают сигналы и-р, и и (; соответственно, .величина которых пропорциональна развиваемому усилию, а знак определяется направлением5 приложенного усилия. Эти сигналы поступают на вход логического устройства 7, которое формирует на выходе сигнал И « согласно следующему выражению r( прииопУе О и„Ч О, если|ио и|ис1 приНопи О L Киоп,еслиио„ис 0 где К-некоторый постоянный коэффициент Если в схвате манипулятора находится предмет, то для его удержания оператор на задающем устройстве должен развить усилие, равное по Еэличине усилию, возникаюшиму в схвате, и HanpiaB- ленное в противоположн то сторону. При этом с датчиков усилий будут сниматься сигналы UQ, и Uc . знаки которых будут противоположны, T.e. о. Эти сигналы формируются на выходе логического устройства в управляющий сигналПу ко торый будет равен нулю, до тех пор, пока усилие, развиваемое оператором, будет меньще усилия в схвате / И./), и величине 1(( и др - Ио усилие, развиваемое оператором, станет больще усилия в схвате lUof, JtfjiJ
Этот сигнал приведет в действие ис- полнительнУй привод, который вызовет увеличение усилия в схвате и при достижении им величины, равной величине усилия, развиваемого оператором, работа привода прекратится. При этом оператор на задающем устройстве будет ощущать противодействующее усилие, равное по величине усилию в схвате. Если усидре в схвате отсутствует ( TJ 0) или его направление совпадает с направлением усилия, развиваемого оператором (Ug jUgVO), то управляющий сигнал на выходе логира, и исполнительного привода с механической передачей, соединенного с датчиком усилия схвата и с исполнительным устройством, и логическое устройство, входы которого соединены с датчиками усилий, отличающаяся тем, что, с целью уменьщения веса и габарита задающей части системы управления, выход логического устройства соединен с входом исполнительного привода, причем механическая передача последнего выполнена необратимой.
Источники информации, принятые во внимание при экспертизе;
