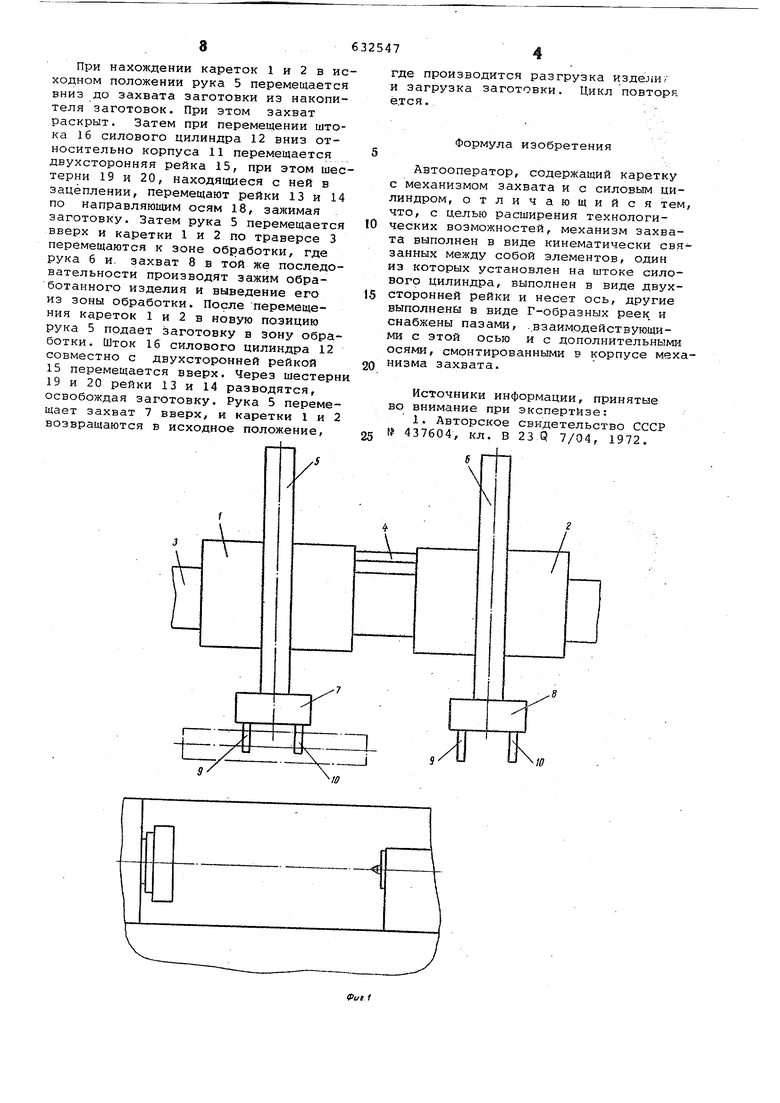
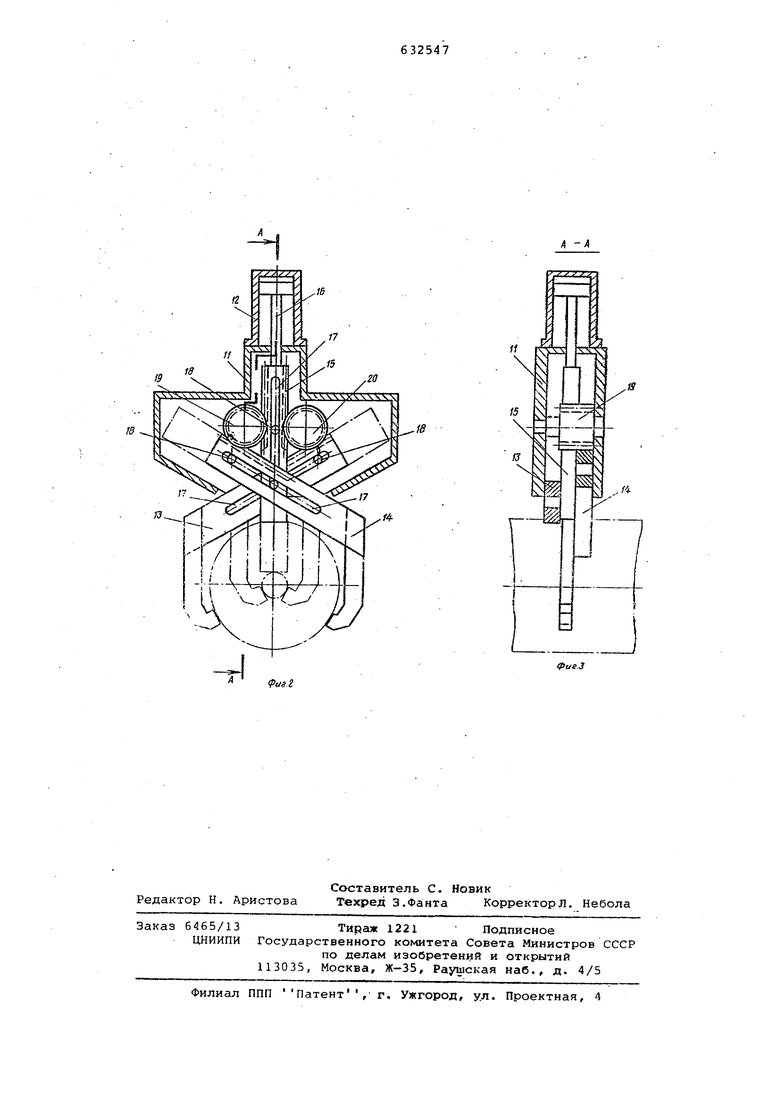
Изобретение относится к области станкостроения, в частности к устро ствам для транспортировки заготовок и изделий. Известен автооператор, содержащи каретку с механизмом захвата и с силовым цилиндром l. Недостатком этого устройства является ограниченный диапазон зажима емых изделий, что снижает его техно логические возможности. Целью настоящего изобретения является расширение технологических во можностей . Для этого механизм захвата выполнен в виде кинематически связанных между собой элементов, один из которых установлен на штоке силового цилиндра, выполнен в виде двухсторон ней -рейки и несет ось, другие выполнены в виде Г-образных реек и снабже ны пазами, взаимодействующими с этой осью и дополнительными осями, смонв корпусе механизма захтированнымивата. На фиг. 1 изображен общий вид автооператора; на фиг. 2 - механизм захвата; на фиг. 3 - разрез Л-А на фи г. 2 .. Автооператор состоит из кареток 1 и 2, установленных на траверсе 3, расположенной над станком на колоннах. Каретки 1 и 2 скреплены стяжкой 4. На каретках 1 и 2 размещены рука 5 оля захвата заготовок и рука б для захвата , обработанных изделий. На концах рук 5 и 6 расположены захваты 7 и 8, каждый из которых состоит из двух идентичных по конструкции частей 9 и 10, Каждая часть захвата содержит корпус 11, несущий привод захвата, например силовой цилиндр 12, и механизм захвата в виде реек 13 и 14. Двухсторонняя рейка 15, смонтированная на штоке 16 силового цилиндра 12, кинематически связывает его с рейками 13 и 14. В рейках 13, 14 и 15 выполнены направляющие пазы 17, в которых установлены оси 18, укрепленные в корпусе 11. Кинематическая связь реек 13 и 14 с двухсторонней рейкой 15 осуществляется через шестерни 19 и 20, которые обеспечивают синхронизацию движения элементов захвата и обеспечивают самоцентрирование его во всем диапазоне захватываемых изделий.
При нахождении кареток 1 и 2 в исходном положении рука 5 перемещается вниз до захвата заготовки из накопителя заготовок. При этом захват раскрыт. Затем при перемещении штока 16 силового цилиндра 12 вниз относительно корпуса 11 перемещается двухсторонняя рейка 15, при этом шестерни 19 и 20, находящиеся с ней в зацеплении, перемещают рейки 13 и 14 по направляющим осям 18, зажимая заготовку. Затем рука 5 перемещается вверх и каретки 1 и 2 по траверсе 3 перемещаются к зоне обработки, где рука б и. захват 8 в той же последовательности производят зажим обработанного изделия и выведение его из зоны обработки. После перемещения кареток 1 и 2 в новую по.зицию рука 5 подает заготовку в зону обработки. Шток 16 силового цилиндра 12 совместно с двухсторонней рейкой 15 перемещается вверх. Через шестерн 19 и 20 рейки 13 и 14 разводятся, освобождая заготовку. Рука 5 перемещает захват 7 вверх, и каретки 1 и 2 возвращаются в исходное положение.
/
/
(
где производится разгрузка издeJiИг и загрузка заготовки. Цикл повторяется.. Формула изобретения
Автооператор, содержащий каретку с механизмом захвата и с силовым цилиндром, отличающийся тем что, с целью расширения технологических возможностей, механизм захвата выполнен в виде кинематически свя занных между собой элементов, один из которых установлен на штоке силового цилиндра, выполнен в виде двухсторонней рейки и несет ось, другие выполнены в виде Г-образных реек, и снабжены пазами, ..взаимодействующими с этой осью и с дополнительными ОСЯМИ, смонтированными в корпусе мехнизма захвата.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 437604, кл. В 23 Q 7/04, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU837755A1 |
| Грейферное устройство для перемещения штучных заготовок между рабочими позициями многопозиционного штампа | 1990 |
|
SU1731373A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Автооператор | 1969 |
|
SU344701A1 |
| Грейферная подача к многопозиционномупРЕССу | 1979 |
|
SU841736A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Автооператор для линий нанесения гальванических покрытий | 1980 |
|
SU948810A1 |
16
19
IS
Pu3Z
f( -A
11
15
ЛВ
13
Фие.З
