Изобретение относится к оборудованию, применяемому в гальванотехнике. Известен автооператор для линий нанесения гальванических покрытий, включающий приводную каретку и направ ляющие с вертикальными и наклонными участками Однако надежность работы такого устройства недостаточна, так как возможно заклинивание кареток в пазах при изменении веса подвесок. Наиболее близким по технической сущности и достигаемому результату к изобретению является автооператор для линий нанесения гальванических покрытий, включающий приводную тележку, подвески с подъемными механизмами Применение только одного привода для тележки не дает возможности точного расположения подвески непосредст венно над освободившейся ванной за счет инерционных сил, возникающих при движении всей металлоконструкции. Кроме того, при обмене деталей в ванне необходимо дополнительное реверсивное перемещение всей конструкции, что снижает надежность работы автооператора. Целью изобретения является повышение работы автооператора. Эта цель достигается тем, что предложенный автооператор снабжен кареткой, установленной на тележке с возможностью перемещения относительно нее вдоль оси линии посредством шагового привода. Подвески с подъемными механизмами размещены на каретке, а шаговый привод выполнен в виде установленного на каретке силового цилиндра, шток которого закреплен на тележке, а подъемные механизмы размещены в углах каретки и расположены в плоскостях, перпендикулярных оси линии нанесения гальванических покрытий, и кинематически связаны между собой. Кинематическая связь
подъемных механизмов выполнена в аиде трансмиссионных валов, а подъемные механизмы выполнены зубчато-реечными.
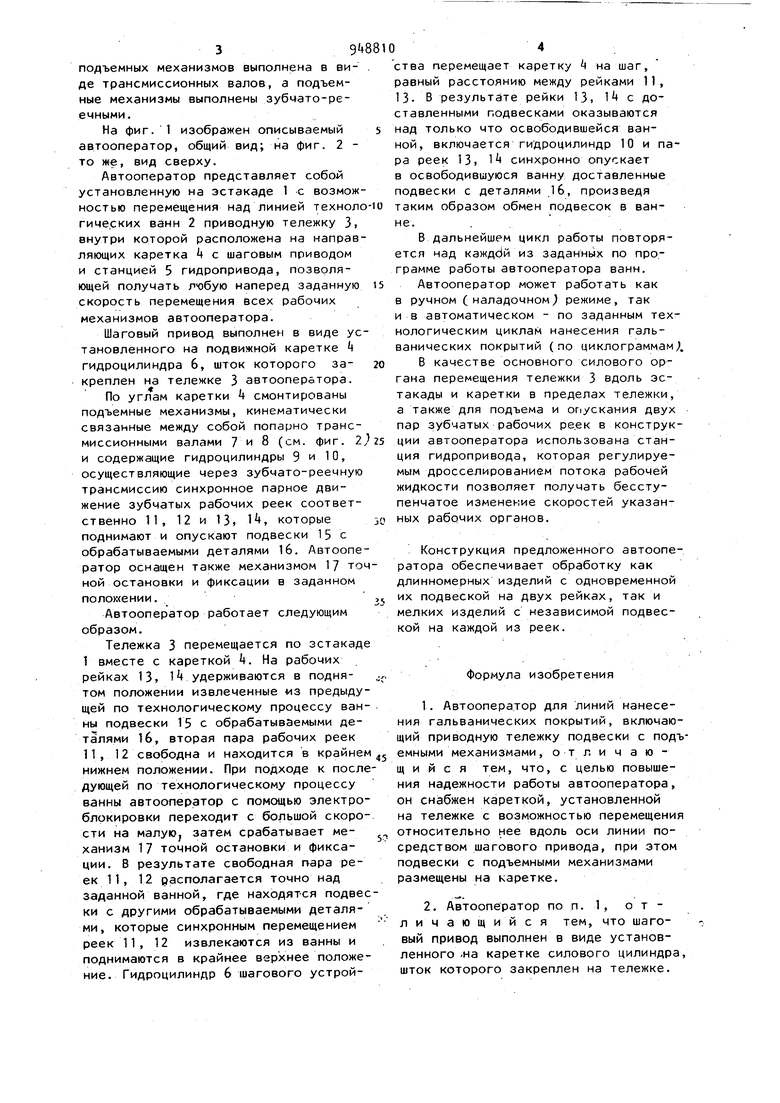
На фиг. 1 изображен описываемый автооператор, общий вид; на фиг. 2 то же, вид сверху.
Автооператор представляет собой установленную на эстакаде 1 с возможностью перемещения над линией техноло гических ванн 2 приводную тележку 3. внутри которой расположена на направляющих каретка 4 с шаговым приводом и станцией 5 гидропривода, позволяющей получать любую наперед заданную скорость перемещения всех рабочих механизмов автооператора.
Шаговый привод выполнен в виде установленного на подвижной каретке 4 гидроцилиндра 6, шток которого закреплен на тележке 3 автооператора.
По углам каретки k смонтированы подъемные механизмы, кинематически связанные между собой попарно трансмиссионными валами 7 и 8 (см. фиг. 2/ и содержащие гидроцилиндры 9 и 10, осуществляющие через зубчато-реечную трансмиссию синхронное парное движение зубчатых рабочих реек соответственно 11, 12 и 13) 1, которые поднимают и опускают подвески 15 с обрабатываемыми деталями 16. Автооператор оснащен также механизмом 17 точной остановки и фиксации в заданном .
Автооператор работает следующим образом.
Тележка 3 перемещается по эстакаде 1 вместе с кареткой k. На рабочих рейках 13j 14 удерживаются в поднятом положении извлеченные «з предыдущей по технологическому процессу ванны подвески 15 с обрабатываемыми деталями 16, вторая пара рабочих реек 11, 12 свободна и находится в крайнем нижнем положении. При подходе к последующей по технологическому процессу ванны автооператор с помощью электроблркировки переходит с большой скорости на малую, затем срабатывает механизм 17 точной остановки и фиксации. В результате свободная пара реек 11, 12 располагается точно над заданной ванной, где находятся подвески с другими обрабатываемыми деталями, которые синхронным перемещением реек 11, 12 извлекаются из ванны и поднимаются в крайнее верхнее положение. Гидроцилиндр 6 шагового устрой04
ства перемещает каретку Ц на шаг, равный расстоянию между рейками 11, 13- В результате рейки 13, 1 с доставленными подвесками оказываются над только что освободившейся ванной, включается гидроцилиндр 10 и пара реек 13, I синхронно опускает в освободившуюся ванну доставленные подвески с деталями 16, произведя таким образом обмен подвесок в ванне.
В дальнейшем цикл работы повторяется над кажддй из заданных по программе работы автооператора ванн.
Автооператор может работать как в ручном (наладочном) режиме, так ив автоматическом - по заданным технологическим циклам нанесения гальванических покрытий (по циклограммам
В качестве основного силового органа перемещения тележки 3 вдоль эстакады и каретки в пределах тележки, а также для подъема и ог1ускания двух пар зубчатых рабочих реек в конструкции автооператора использована станция гидропривода, которая регулируемым дросселированием потока рабочей жидкости позволяет получать бесступенчатое изменение скоростей указанных рабочих органов.
Конструкция предложенного автооператора обеспечивает обработку как длинномерных изделий с одновременной их подвеской на двух рейках, так и мелких изделий с независимой подвеской на каждой из реек.
Формула изобретения
1.Автооператор для линий нанесения гальванических покрытий, включающий приводную тележку подвески с подъемными механизмами, о т л и ч а ю щ и и с я тем, что, с целью повышения надежности работы автооператора, он снабжен кареткой, установленной на тележке с возможностью перемещения относительно нее вдоль оси линии посредством шагового привода, при этом подвески с подъемными механизмами размещены на каретке.
2.Автоопёратор по п. 1, отличающийся тем, что шаговый привод выполнен в виде установленного .на каретке силового цилиндра, шток которого закреплен на тележке.
3. Автооператор по п. 1, о т л ичающийся тем, что подъемные механизмы размещены в углах каретки.
k. Автооператор по пп. 1 и 3, 5 отличающийся тем, что подъемные механизмы, расположенные в плоскостях, перпендикулярных оси линии нанесения гальванических покрытий, кинематически связаны между собой. ю
5. Автооператор по пп. 1, 3 и Ц, отличающийся тем, что кинематическая сдязь подъемных механизО6
мов выполнена в виде трансмиссионных валов.
6. Автооператор по пп. 1, 3 и , отличающийся тем, что подъемные механизмы выполнены зубчатореечными.« .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 522287, кл. В 65 G , .Патент Великобритании № И7568.6, кл. В 65 G , опублик. 1977 (про тотип).
й/г. /

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения покрытий | 1982 |
|
SU1070221A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автоматическая линия гальвано- ОбРАбОТКи издЕлий | 1979 |
|
SU817102A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Автооператор для гальванических линий | 1988 |
|
SU1581784A1 |
| Автооператор | 1985 |
|
SU1247435A1 |
| Автоматическая линия для нанесения покрытий на изделия погружением в ванны | 1986 |
|
SU1330056A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ НА ДЛИННОМЕРНЫЕ ИЗДЕЛИЯ | 2003 |
|
RU2271403C2 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |

