Изобретение относится к системам управления с эталонной моделью объектами с нестационарными параметрами.
. Цель изобретения - повышение точности и расширения области применения путем использования системы для управления нестационарным объектом управления, когда меняются коэффициенты матриц объекта и управления, с дифференцированием вход- наго сигнала внутри объекта, с измеряемой координатной аддитивной помехой и с моделью пониженного порядка.
Рассмотрим нестационарный объект управления для простоты рассуждений второго порядка:.
a2(t)x Ч-а i(t).x +a0(t)x bi(t)ui+b0(t)ui +|(t) (1)
и регулятор:
ui(t )-m(t)u-k(t)x.
(2)
Из (2) определим значение ui(t):
ui mu+mu -lex-kx.(3)
Из (1), (2) и (3) запишем уравнение системы управления:
ai(t) + bi(t)k(t)(t)-r + b0(t)k(t) + bi(t)k (t)x bi(t)m(t)u i(t)m(i) + + bo(t)m(t)u-a2(t)x-l-|(t) (4) или перепишем его в эквивалентной форме: ai +Ak(t)x+ a0+Ako(t)x biAmi(t)u+ b0+Am0(t)u-a2(t)x4|(t).(5) Введем обозначения:
to С
00
1
31807446 4
a i (О 4-b 1 (t)k(t) Таким образом, можно сформулировать дачу Синтеза алгоритмов параметрического
ai+AkfOуправления
.- 5 Ak8(t),AkJ(t),AmS(t)VAml(t)
a0(t) + bo(t)k(t) + b i (t)k(t) -из условия гарантированной устойчивости
процедур настройки и выборе устойчивой a0+Ako(t)эталонной модели (7). Измерению подлежат
. :., - . . ....,. . : X, X,U, U. -.-,.... :
b 1 (t)m(t) b 1 +Am i(t),10 ВыбеРемФУнк4И|олапуноваприх соп81г 0; bi(t)m(t) + bpm(t) bo+Amo(t) v %VVH +(AkS)2 +
и модель системы управления:- „ „
: Т 15 . .+ (Aki)2+(AmS)2 +
а 1 ifi +a0x b 1 u +Ь0 u .(7)
:, - : . - :;, ;:+(AmJ)2 (12)
Из (5), (6) и (7) можем записать::
,, и найдем производную функцию Ляпунова: a iE + aoe Amo(t)u+Am t (t)u - 20
ГГ V ч А, /V v x(VV.H + VVH) + AkSAkH+ .
- .-Ako(t)x:Ak i (t)x- о
-a2(t)x4-|(t)(8) : :. ..+AkH;AkH+AmHAni-H+Am.HAmH (13)
.: ,, ;;.. -У.;. .../. .;.,;.: :....,: -. V. V . .25 .. - V -4 ::;; / - .- . В уравнении (8) составляющие левой части где из (9 примем обозначения ;. известны и полностью измеряемы при уело-д . вии возможности измерения выходных ко- .Va a 1 е + а рб,
opflHHaf моделии системы. СоставляющиеV AkHX + Akix-4правой части уравнения полностью не изме- 30. 0 . 1 /4Л л
ряются, так как не поддаются этому измерё-тАтни+Атни (14)
нию. Таким образом, уравнение (8) можно; .
рассматривать как уравнение нового о 5ьек-С учетом (14) из (13) получим
та управления с входным сигналом, равным
правой части уравнения (8). Если компенси- 35у -у V + с(х)
ровать левую часть уравнения (8), то сигнал г ...
компенсации в установившемся состоянии/-т V
будет тоже равен правой части уравненияА „ + d -) Am jj + d u Am н +
Будем обеспечивать равенство40 -.
. : .;-T-xtAkSVx+Ak|Vi+M8Vu+AmiVu +
а 1 Ј + а о е Ak 8 (t) х + Am g (t) u .+:; + Aki(t)x+Ami(t)u. (9) 45 V ; + Ai Й Ak g + Am Й Am g+
При этом значения настраиваемых парамет-.-.+ АЦ.н Aki +Am нAm н (15) ров регулятора представим в виде
.. Для определения отрицательности произ- k(t) k(to)+AkS(t)+AkH(t) 50 водной функции Ляпунова для коэффйциен- : . та AkS потребуем выполнения следующих m(t) m(to) + AmS(t)+Ami(t). (10) соотношений:
Заметим, что равенство (9) будет выполне- - д о . о, Дь g О, но, если будут выполнены равенства(t
faiЈ Akl(t)x+Ami(t)u,Xo AkS Vx Akg AkS 0 (16) Lao6 AkS(t)x+AmS(t)u. (11) cons t 0. :
l:
Для коэффициентов ,ЛтЯиДт нмо- гут быть записаны аналогичные (16) соотношения. Ввиду того, что соотношения (16) для
коэффициента A k н (t)) должны выполнять- ся одновременно, то можем записать, например
Ak8(t)-«-()vxdt). (17)
.to
Или окончательно из (10) и (17) запишем алгоритмы адаптации параметров регулято- 1.5 ра:
k(t) k(to)(Vx + Vx + + d(Vx+Vx +1 ( Vx + Vx ) d I)
to
m(t)m(t0)-%o(Vu + Vu +
:(18) + d(Vu + VU +|(Vu+Vu)dt)
01
to
Алгоритмы адаптации параметров регулято- pa k(t) и m(t) в виде (18)обеспечивают в конце процедур настройки стремление к нулю
V(t)HAkS(t),Amg(t),Ak(t),Am(l(t).
. При этом при V(t) 0 из (14) очевидно, что при 31 0, а0 0 знаки е и е разные, поэтому в положении равновесия функции Ляпунова возможно только равенство
Ak0 Ak 1 0; Am0 Aml 0;Ј .0и.
так как еие связаны в объекте управления
зависимостью е( t) e( to )+J Јdt. Зна . . : :. -. :. . 1° - : чит, с течением времени начальные условия
е (t0). будут скомпенсированы сигналом действия производной.
Реализация алгоритма (18) в виде контура адаптации не вызывает затруднений.
Теперь рассмотрим несколько иной подход к синтезу алгоритмов адаптации параметров регулятора, для чего из (11) запишем:
, yiH Akix+Am,lu1
(19) ., VOH AkSx+AmHU. 55
Выберем функцию Ляпунова v, где положим
V(t)4VoV1}T.VH (t)4v0H,ViH}, Т(20)
в виде
v- VTVH+4-(Ak°)2 +
g
10
1.5
0
5
5
ЛП
л
5
.(Ak +CAmgy+CAmi) (21)
Поступая аналогично тому, как были получены алгоритмы адаптации (18), можем записать алгоритмы адаптации параметров регулятора для рассматриваемого случая:
k(t)k(to)- (Vix + VD + + d(Vix-fV0x+j()dt)
to
m(t) m(to)- (Viu + V0u V
-......, - - f22)
. + )-+|( V1 + vou).dt).
to
Реализация алгоритма (22) сложнее реализаций алгоритма (18), поэтому на чертеже представлена система управления, реализующая алгоритм адаптации
(18)-. .
На чертеже показана структурная схё- ,ма систем управления.
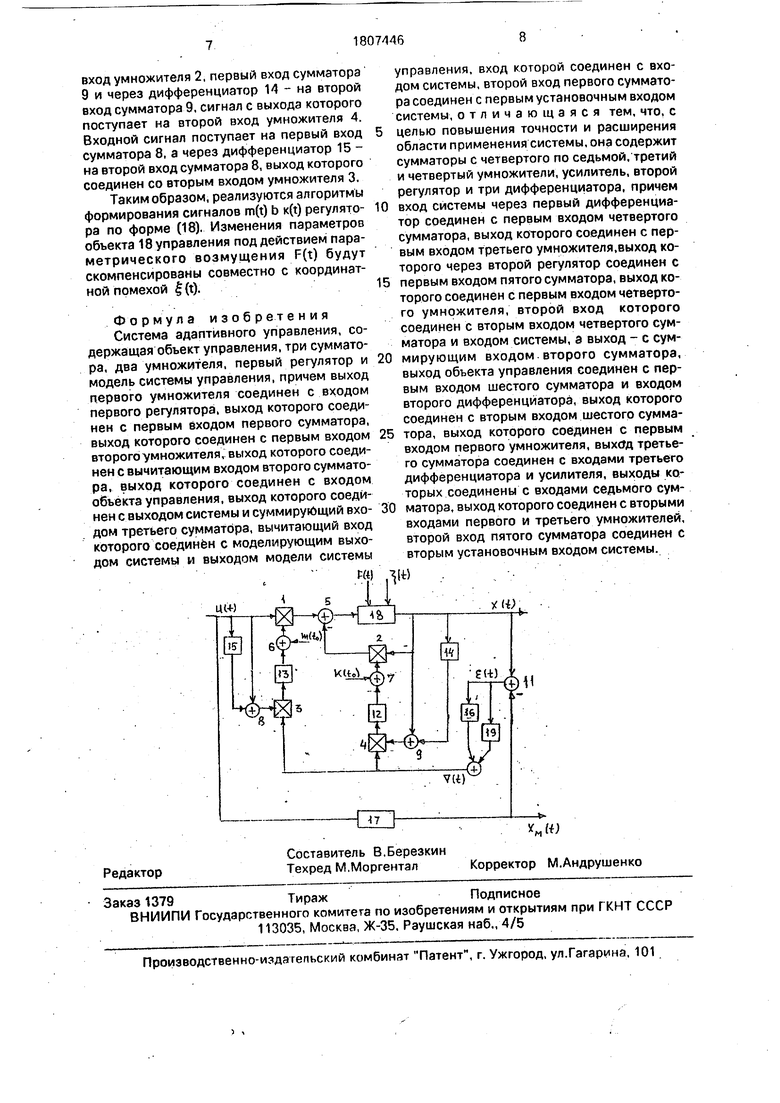
Система содержит умножители 1-4, сумматоры 5-11, ПИД-рёгуляторы 12-13, дифференциаторы 14-16, модель 17 системы управления, объект 18 управления, усилитель 19, x(t),x(t) -выходы соответственно объекта и модели, F(t), (1)-помехи соответственно параметрическая и координатная, u(t) - задание, u1(t) - управление. ; Система работэе т следующим обра-:
;ЗОМ.. : : ; ..,.. . -. .: . .
Входной сигнал u(t) поступает на вычитающий вход сумматора 11 через модель 17 системы управления, а на суммирующий вход сумматора 11 - через последовательно соединенные умножитель 1, сумматор 5, объект 18 управления. Сигнал невязки Ј(t) с выхода сумматора 11 поступает на соответствующие входы сумматора 10 через усилитель 19 и дифференциатор 16. Сигнал V (t) с выхода сумматора 10 поступает на второй вход умножителя 1 через последовательно соединенные умножитель 3, ПИД-ре- гулятор 12, сумматор 6, а на вычитающий вход сумматора 5 через последовательно соединенные умножитель 4, ПИД-регулятор 12, сумматор 7 и умножитель 2. Выходной сигнал объекта 18 x(t) поступает на второй
вход умножителя 2, первый вход сумматора 9 и через дифференциатор 14 - на второй вход сумматора 9, сигнал с выхода которого поступает на второй вход умножителя 4. Входной сигнал поступает на первый вход сумматора 8, а через дифференциатор 15 - на второй вход сумматора 8, выход которого соединен со вторым входом умножителя 3. Таким образом, реализуются алгоритмы формирования сигналов m(t) b к(т.) регулятора по форме (18). Изменения параметров объекта 18 управления под действием параметрического возмущения F(t) будут скомпенсированы совместно с координатной помехой Ј(t).
Формула изобретения Система адаптивного управления, содержащая объект управления, три сумматора, два умножителя, первый регулятор и модель системы управления, причем выход первого умножителя соединен с входом первого регулятора, выход которого соединен с первым входом первого сумматора, выход которого соединен с первым входом второго умножителя, выход которого соединен с вычитающим входом второго сумматора, выход которого соединен с входом объекта управления, выход которого соединен с выходом системы и суммирующий входом третьего сумматора, вычитающий вход которого соединён с моделирующим выходом системы и выходом модели системы
, - щ
управления, вход которой соединен с входом системы, второй вход первого сумматора соединен с первым установочным входом системы, отличающаяся тем, что, с
целью повышения точности и расширения области применения системы, она содержит сумматоры с четвертого по седьмой, третий и четвертый умножители, усилитель, второй регулятор и три дифференциатора, причем
вход системы через первый дифференциатор соединен с первым входом четвертого сумматора, выход которого соединен с первым входом третьего умножителя.выход которого через второй регулятор соединен с
первым входом пятого сумматора, выход которого соединен с первым входом четвертого умножителя, второй вход которого соединен с вторым входом четвертого сумматора и входом системы, а выход - с суммирующим входом, второго сумматора, выход объекта управления соединен с первым входом шестого сумматора и входом второго дифференциатора, выход которого соединен с вторым входом шестого сумматора, выход которого соединен с первым входом первого умножителя, выход третьего сумматора соединен с входами третьего дифференциатора и усилителя, выходы которых соединены с входами седьмого сумматора, выход которого соединен с вторыми входами первого и третьего умножителей, второй вход пятого сумматора соединен с вторым установочным входом системы.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Адаптивная система управления | 1991 |
|
SU1807447A1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
Изобретение относится к системам управления нестационарными объектами управления с дифференцирующим входом, подверженным действию координатной помехи. Цель изобретения - повышение точности и расширение области применения системы. Система содержит четыре умножителя, семь сумматоров, два регулятора, три дифференциатора, модель системы управления и объект управления. 1 ил.
| Борцов Ю.А | |||
| и др | |||
| Электромеханические .системы с адаптивным и модельным управлением | |||
| -Л.: Энергоатомиздат, 1984, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Петров Б.Н | |||
| и др | |||
| Принципы построения И проектирования сэмонастраивающихся систем управления - М.: Машиностроение, 1972, с | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
