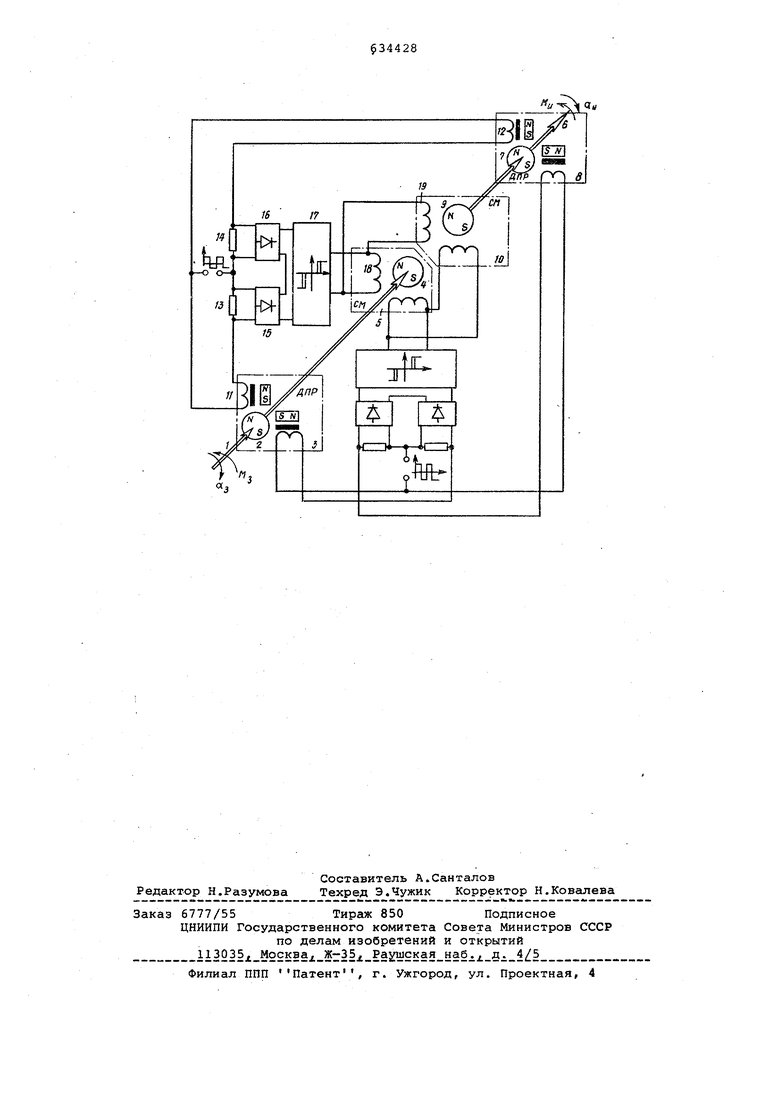
нительном валу 6 привода укреплен ро тор 7 ДПР 8 конструкции, идентичной ДПР 3, и ротор 9 СМ 10. Число статорных обмоток СМ 5 и СМ 10, а следовательно, и число рабо чих обмоток ДПР 3 и ДПР 8 может быть произвольным и на чертеже принято ра ным двум. Поскольку схема привода сим метрична для каждой обмотки, показан связи лишь для одной из них. Рабочие обмотки 11 ДПР 3 и 12 - ДПР 8 подключены к общему источнику Напряжения повышенной частоты. Выходные напряжения датчиков вьаделяются на резисторах 13 и 14 и. через выпрямители 15 и 16 встречно подключены к управляющим зажимам мостового полупроводникового коммутатора (ППК) 17. К выходным зажимам этого коммутатора подключены параллельно статорные обмотки 18 СМ 5 и 19 СМ 10. Схема соединений для второй фазы аналогична приведенной. Привод работает следующим образом В режиме покоя при oCj «1 cotietj Мц, Мо,0, ДПР 3 и ДПР 8 иьрабатывают одинаковые импульсы, finpMHa которых для одной пары обмоток (например 11 и 12) пропорциональна соответственно 5incX-i и&|по(,ц а для другой пары -cosa:.ju.oacv,(,.Pa3HocT этих импульсов равна нулю, статорные обмотки СМ 5 и СМ 10 обесточены, и привод по силовым цепям практически не потребляет энергии . При повороте задающей оси на некоторый угол импульсы ДПР 3 и ДПР 8 отличаются по длительности. Их разница выделяется и усиливается в ППК, и на статорных обмотках СМ 5 и СМ 10 появляются широтно-импульсно-модулированные напряжения. Под действием этих напряжений ротор 9 СМ 10 и ротор 7 ДПР 8 поворачивается. Угол поворота исполнительного вала зависит при этом от нагрузочного момента Мц, Если М JL - О, то вращение СМ 10 будет продолжаться до тех пор, пока не восстановится равновесие импульсов ДПР 3 и ДПР 5, т.е. пока oi ц, не станет равным Если М п f о то сС (J. р ct, 1 т. е, привод представляет собой систему статическую относительно момента), и СМ 10 вращается до тех пор, пока не наступит равновесие моментов на исполнительной оси. Нетрудно видеть, что средние напряжения на обмотках СМ 10 пропорциональны Му. Они одновременно питают обмотки СМ 3 на задающем валу, поэтому моменты. М г, и М ц в установившемся режиме пропорциональны. Коэффициент пропорциональности межМ ц, достаточно просто можно изменять, если выполнять СМ 5 по кон- . струкции, аналогичнойСМ 10, но в других габаритах, а также средствами схемотехники. Таким образом, в устройстве с помощью дополнительной СМ удается отразить на задающем валу моменты, возникающие на исполнительном валу, т.е. выполнить привод обратимым. В отличие от аналогичных ОСП на сельсинах или двухфазных двигателях настоящий привод потребляет существенно меньшую мощность в нерабочих режимах, имеет лучшие массо-габаритные показатели и проще по конструкции благодаря использованию ДПР БДПТ в качестве датчиков перемещения задающего и исполнительного валов. Формула изобретения Устройство дистанционной передачи угла поворота задающего вала по авторскому свидетельству № 542314, отличающееся тем, что, с целью расширения области применения устройства путем создания отражения моментов нагрузки исполнительного вала на задающем валу, устройство снабжено второй синхронной машиной, на задающем валу укреплен ротор второй синхронной машины, секции статорной обмотки которой подключены параллельно одноименным секциям первой синхронной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Синхронизированный бесконтактный электродвигатель постоянного тока | 1985 |
|
SU1352590A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |