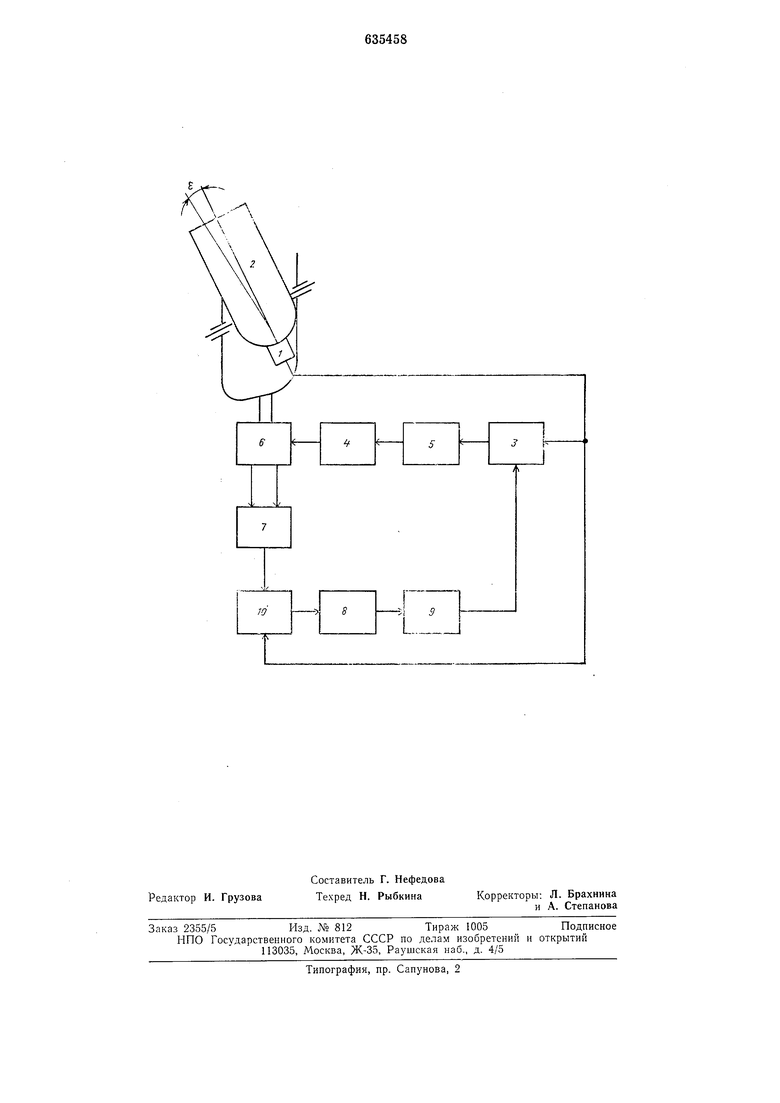
пр + л - 1 -f + где ai, flj, аз - коэффициенты коррекции, зависящие от параметров системы; -Хт я -значение координаты рассогласования, снятое с измерителя рассогласования и преобразованное в цифровой код в я-й момент времени. Этот сигнал иостуиает на иснолнительный механизм 6 через второе усилительноиреобразовательное устройство 4. На выходном валу объекта наблюдения установлен преобразователь 7 угол - код. Этот цифровой код попадает на сумматор 10, где производится суммирование его с сигналом рассогласования. Сигнал с выхода сумматора 10 поступает на дифференциатор 8, выходной сигнал которого обрабатывается экстраполятором 9 таким образом, чтобы полученный сигнал был пропорционален экстраполированному за некоторый промежуток времени значению первой и второй производной выходной координаты объекта наблюдения. «4 (ДУ («) + fi-ЛУ П), где а4, «5 - коэффициенты коррекции, зависящие от параметров системы, - у1п - 1. Значения ... измеряются и преобразуются из аналоговой величины положения исполнительного механизма 6 в цифровой код преобразователем 7 угол - код, где - значение координаты угол - код в п-й момент времени; у п-1 -значение координаты угол - код в я - 1-й момент времени; Ai/ я - 1 Дг/ п - Ду я - 1, А( , где значения ... -скорости выходной координаты вычисляются дифференциатором как разность двух соседних значений координат, измеренных преобразователем угол - код, ... -значения ускорения выходной координаты, которые вычисляются аналогично . Далее экстраиолятор экстраполирует выходную координату на следующий кадр. Если экстраполяцию сделать несколько раз и усреднить полученные значения производной выходной координаты за некоторый промежуток времени, можно свести к минимуму вредное влияние положительной обратной связи по возмущениям, действующим на объект регулирования. Использование такой структуры выгодно отличает предлагаемое устройство от прототипа, так как позволяет получить эффект снижения частоты вычисления входного воздействия в вычислительном устройстве при повыщении необходимой точности слежения. В результате включения дифференциатора и экстраполятора входным воздействием системы является сумма экстраполированного значения выходной координаты системы и рассогласования, которая в идеальном случае приближается к значениям вектора скорости объекта. Изобретение может быть применено для точного слежения за объектом, предварительная информация о координатах которого отсутствует. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель сигнала рассогласования, соединенный с объектом регулирования, первое усилительно-преобразовательное устройство, вычислительное устройство, второе усилительно-преобразовательное устройство, исполнительный механизм, первый выход которого соединен с объектом регулирования, а второй через преобразователь угол - код подключен к первому входу сумматора, второй вход которого соединен с выходом измерителя сигнала рассогласования, отличающаяся тем, что, с целью повышения точности системы, в ней установлены последовательно соединенные дифференциатор и экстраполятор, выход которого соединен с вторым входом первого усилительно-преобразовательного устройства, вход дифференциатора соединен с выходом сумматора. Источники информации, принятые во внимание при экспертизе 1.Неплохое Б. М. Исследование цифровой комбинированной системы автоматического управления. Сб. «Цифровое управление в системах автоматики. М., «Наука, 1968. 2.Richard А. Volk, Louis F. Kazda. Designe of a Digital Controller fop a Tracking Telscope Transactions of Antomatic Control, June 1967, Number 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Цифровая следящая система | 1977 |
|
SU723508A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Цифровое псевдолинейное корректирующее устройство | 1984 |
|
SU1190360A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |