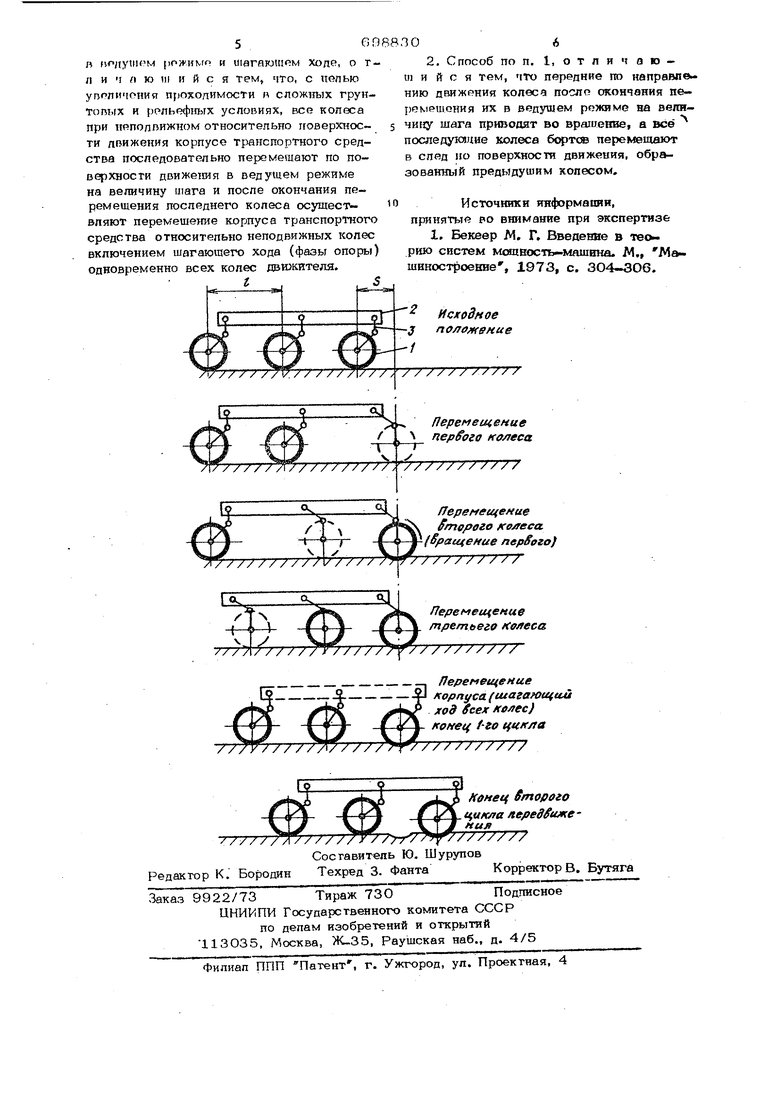
Изобретенио относится к способам передвижения транспортных средств высокой проходимости и в частности, к транспортным средством с колесночиагающим дви. жителем. Известен-способ передвижения транспортного средства с копесно-шагающим движителем методом дискретнотх) перемещения колес в ведущем режиме и шагающем ходе ij . В этом способе в первый период колеса одного борта передвигаются в ведущем режиме по опорной поверхности на длину шага, затем они блокируются и при помощи механизма шагания перемещают кор пус машины на величину шага. Колеса одного и второго борта передвигаются попеременно: если колеса одного борта движутся в ведущем режиме, то колеса второго борта блокированы и, упираясь в грунт, толкают-корпус вперед, что обеспечивает непрерывное передвижение кор пуса транспортного средства. При этом способе решается основная проблема - устойчивость движения, что позволяет 1юпользовать колесное шагание для мапоопорных транспортных средств, т.е. практически начиная с трехопорных. Недостатком этого способа является то, что желание обеспечить непрерывное передвижение транспортного средства в копесно-шагающем режиме требует чепсой синхронизации перемещения колес, а также четкого и совершенно опредепенного соотношения скоростей перемещения коивс в шагаюшем ходе и ведущем режиме. Это обстоятельство является довольно cei eeным ограничением при синтезе оптимальных механизмов приводов шагания (перемещения колес). Этот способ -явлнется ближайшим к заявляемому и является прототипом. Цель изобретения - увеличение проходимости в сложных грунтовых в рельефных условиях. Эта цель достигается тем, что все колеса при неподвижном относительно 36 поверхности движения корпусе транспортиОтчэ средства последовательно перемешают по поверхности движения в ведущем режиме на величину шага и после окончания перемещения последнего колеса осуществляют переметeraie корпуса транспортного средства относительно неподвижных колес включением шагающего хо да (фазы опоры) одновременно всех копес движителя, Кроме того, передние по. направлению движения колеса после.окончания перемещения их в ведущем режиме на величину шага п;риводят во врашепие, а все последуюшие колеса бортов перемещают в след на поверхности движения, образованной предыдущим колесом. На фиг. (а, б, Б г, д, е) представлена с.хома предлагаемого способа передвижения транспортного средства с колесно-шагаюшим движителем. Процесс передвижения транспортного средства состоит из следующих этапов. Сначала все колеса 1 поочередно, при не подвижном корпусе 2. транспортного средства, перемещаются по опорной поверхно-
сти в ведущем режиме вперед по направлению движения на величину шага S (фиг. 10, 16, 1в, 1г). Затем относительно неподвижных колес 1 на грунте с помощью механизмов шагания 3 перемещается вперед корпус 2 на величину шага 5 ((иг. 1д). На фиг. 1 показаны нксировашше моменты вышеуказанной последовательности процесса передвижения заявляемого способа передвижения, обеспечивающе го реализацию максимальных тяговых свойств колесно-шагающего движителя, так как в этом случае сипа сопрртивления движению О11ределяе--/х;я сщтой сопро Ю тивления перемещешгл .тз зедущем режи- ме только одного колеса, а то время как остальные неподвижны и способны решгй зевать максимальную силу тяги. Прячем peajiiiaarufft ётюс качеств пё conpsDKeHa с наличием кшстас-лпбо oipaHireeniul и симостй по скорости перемещения косее В ведущем режиме и шагающем ходе, что является существенным достоинством предлагаемого способа передвижения. Прерывный характер перемещения колес и корпуса транспортного средства позволяет использовать дополнительные свойства, обеспечивающие увеличение тяговых свойств движителя. Так экспериментальные исследования одиночного колеса в грунтовом канале показали, что тяговые свойства шагаюшего колеса при
одновреме.нно с перемещениями в ведущем реншме последующих колес. Фиг. 1е соответствует когда 6 25, а поэтому все
колеса начинают использовать след первого колеса на пятом цикле перемещ.ения из исходного положения,
По предлагаемому способу бъЕПи проверены соответствуюш.ие расчетно-теоре-
тич-зские и эксперимент шьные исследованияп Ястгьггания экспериментального макета с этим способом передвижения показали, что макет может преодолевать подъехуЕЫ с сыпучим грунтом вплоть до угла 3О его сдвиге увеличи1адются чпм в три раза при сдвиге колеса из ггродвярительного заглубления, по срамшнию со Сдвигом колеса установленного на ровной поверх гости, В движителе заглубление колеса в грунт обеспечивается методом его вращения на месте, причем, с целью уменьшения энергозатрат, достаточно заглублять только передние колеса, а все остальные колеса бортов расположить так, чтобы каждое последующее колесо перемещалось в след предыдуще1Х), в результате чего углубления, образованные передними колесами, используются всеми колесами бортов, как искусственно образованные упоры. Режим движения след в след достигается, когда расстояние между осями колес ( ) в их номинальном положении составляет целое число (i ) длина шага 5 , т.е. 6 lS . На фиг. 1в показано, что в конце перемеще1шя первого колеса на величину шага S , оно приводится во вращение на место до образования оптимальной величины его заглубления в грунт, причем это может осуществляться естественного откоса этого грунта. В этих условиях невозможно передвижение 7iH одним из распространенных движителей. Так.йм образом, в предлагаемом спосебе передвижения отсутствуют какие-либо отракичения по скорости перемещения колес в колесно- шагаюшем режиме, что значительно упрощае-i- синтез оптимальных мехаш- змов привода шагания и одновреMeifflo обеспечивает реализацию максимальных тяговых свойств (проходимость) движителя. Формула изобретения 1. Способ передвижения транспортного средства с колесношагаюшим движителем методом дискретного перемещения колес
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ непрерывного передвижения транспортного средства с колесношагающим движителем в колесно-шагающем режиме | 1976 |
|
SU640897A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Способ передвижения колесно- шАгАющЕгО ТРАНСпОРТНОгО СРЕдСТВАВ КОлЕСНОМ РЕжиМЕ | 1979 |
|
SU800008A1 |
| Способ прогнозирования положения транспортного средства | 1980 |
|
SU935324A1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| Транспортное средство | 1979 |
|
SU880853A1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
