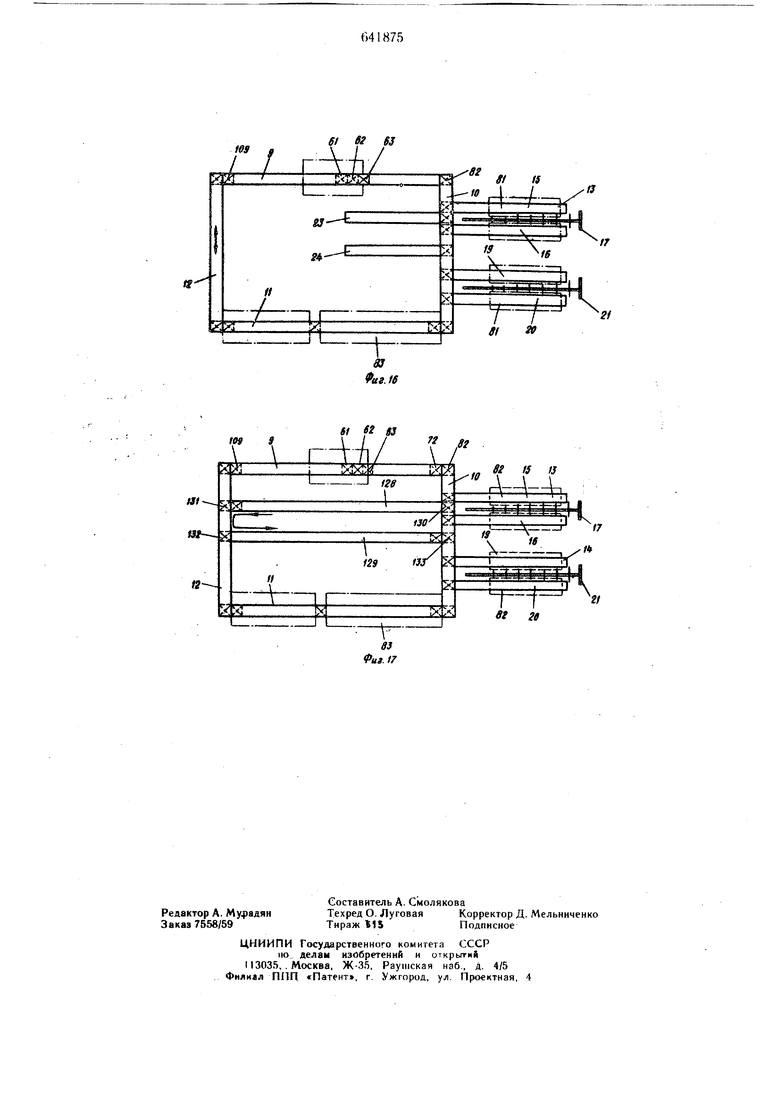
система, вид сверху; на фиг. 17 - то же, другой вариант.
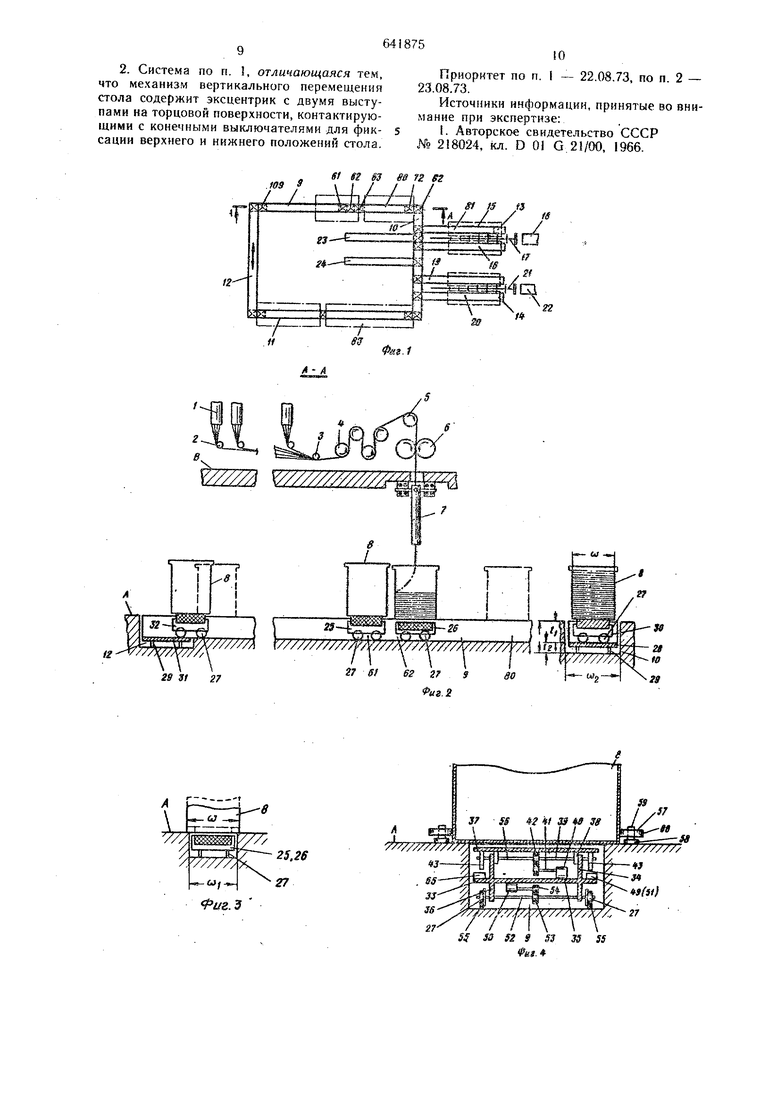
На фиг. -3 показано вытяжное оборудование, размешенное на первом этаже А, а прядильное располагается на втором этаже В.
Пряжа от охлаждающих устройств I через направляющие ролики 2 направляется к коллекторному ролику 3 для изменения направления их перекоса, затем собранные в пачки нити захватываются группой валиков 4 и подаются направляющим роликом 5 к захватывающимроликам 6.
Пачка нитей через качающуюся в поперечном направлении трубу 7 поступает в тазы 8, перемещающиеся в направляющих каналах 9-12, расположенных вдоль машины.
От поперечного канала 10 отходят два отводных канала 13 и 14. Канал 13 содержит пару заправочных каналов 15 и 16, проходящих вдоль горизонтальной стойки 17 первого вытяжного оборудования 18, канал 14 содержит пару заправочных каналов и 20, проходящих вдоль горизонтальной стойки 21 вытяжного оборудования 22.
От канала 10 предусмотрены два вспомогательных отводных канала 23 и 24 для временного хранения тазов 8.
Как показано на фиг. 2, каналы 9, 10 и 12 выполнены в полу первого этажа А. Канал 11 аналогичен каналу 9. В канале 9 размещены две тележки 25 и 26 с колесами 27, вращающимися от приводного механизма (на чертежах не показан), установленного на тележках.
В поперечном канале 10 размещена тележка 28 с колесами 29. На тележке 28 установлена с возможностью перемещения тележка 30, конструкция которой аналогична конструкции тележки 25(26). В поперечном канале 12 размещена тележка 31, на которой установлена с возможностью перемещения тележки 32.
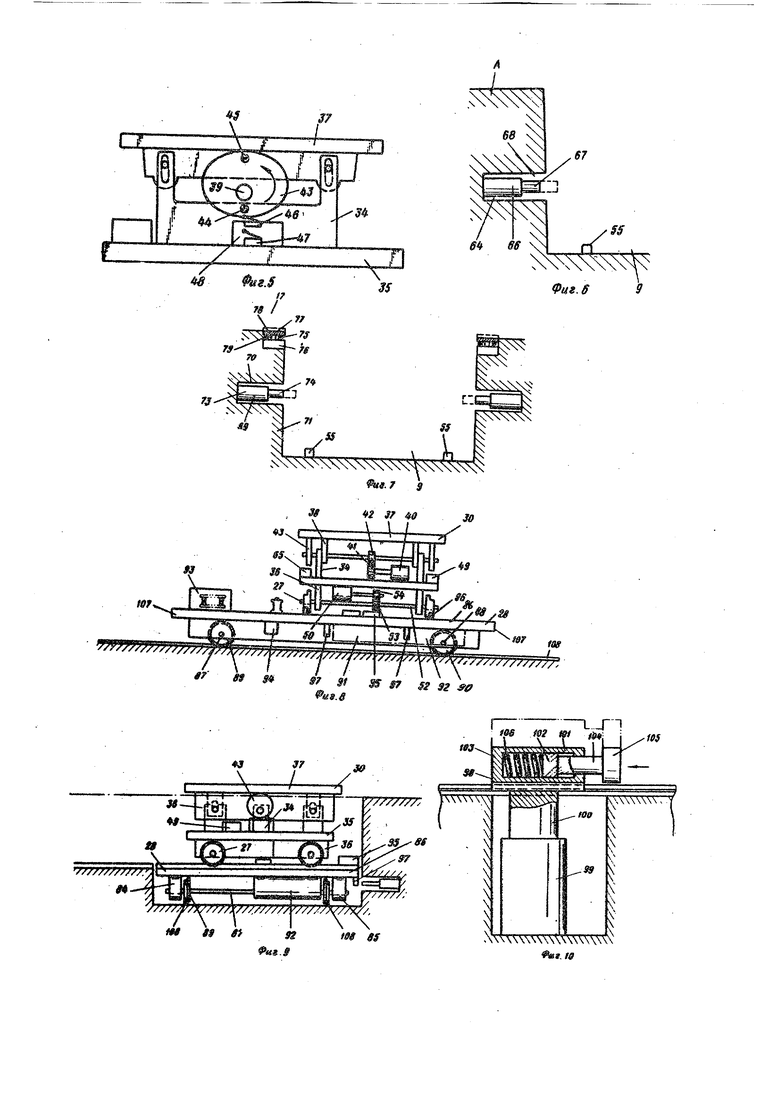
Тележка 25(26) содержит опорную раму 33. Опорная рама 33 имеет пару вертикальных кронштейнов 34, выступающих вверх от рамы 35, и пару вертикальных кронщтейнов 36, направленных вниз от горизонтальной рамы 35. На опорной раме 33 смон тирован под1: емный стол 37, снабженный парой вертикальных кронштейнов 38, которые с возможностью скольжения опираются на кронштейны 34 так, что подъемный стол 37 может смещаться вверх и вниз. На кронщтейнах 34 закреплен горизонтальный вал 39 с возможностью вращения. На валу двигателя 40 фиксирована щестерня 41, находящаяся в зацеплении с щестерней 42, жестко закрепленной на валу 29.
Механизм вертикального перемещения подъемного стола 37 содержит эксцентрики 43, жестко установленные на концах вала 39.
Один из эксцентриков 43 снабжен двумя выступами 44 и 45 на торцовой поверхиогги. контактирующими с конечными выключателями 46 и 47, установленными на кронштейне 48 так, что конечный выключатель 46 при повороте эксцентрика 43 включается выступом 44, а конечный выключатель 47 - выступом 45.
На раме 35 установлено магнитное реле 49, которое включает или отключает двигатель 40 от источника электрической энергии по сигналу, поступающему от конечного вы ключателя 46 или 47.
При первоначальном подключении двигателя 40 к источнику электрической энергии по сигналу магнитного реле 49 от управляющего компьютера (на чертежах не показан).
двигатель 40 поворачивает эксцентрик 43 против часовой стрелки (фиг. 5), а когда выступ 44 приводит в действие конечный выключатель 46 и подъемный стол 37 смещается к его верхнему положению эксцентриком 43, магнитное реле 49 размыкает от источника энергии двигатель 40, в результате чего стол 37 удерживается в его верхнем положении. При новом воздействии управляющего компьютера на магнитное реле 49 двигатель 40 снова подключается к источнику энергии так, что эксцентрик 43 поворачивается и стол 37 перемещается вниз. Когда выступ 45 воздействует на конечный выключатель 47, магнитное реле 49 по сигналу выключателя опять разрывает соединение двигателя 40 с источником энергии, устанавлиф вая подъемный стол 37 в его нижнем положении.
Глубина канала 9 выражается (см. фиг. 2), расстояние между упомянутым верхним положением и полом канала 9 больще , в то время как расстояние между нижним положением и полом канала 9 меньще р .
На раме 35 (фиг. 4) установлен реверсивный двигатель 50. Для изменения полярности электрического питания двигателя 50 на раме 35 расположено реверсное магнитное реле 51. Магнитное реле 51 возбуждается от управляющего компьютера.
На кронштейнах 36 щарнирно установлены два горизонтальных вала 52. Один из валов снабжен щестерней 53, взаимодействующей с щестерней 54, жестко закрепленной на валу двигателя 50, от которого принудительно вращаются колеса 27. НаправЛЯЮ1ДИМИ для колес 27 в канале 9 служат рельсы 55.
Соединения электрического источника с двигателями 40 и 50 выполняют путем использования системы намотанного щнура, т.е. на одном конце канала 9 устанавливается замотанный шнур с тем, чтобы при спуске щнура с барабана (на чертежах не показан) тележка 25 удалялась от барабана, а 55 когда тележка 25 приближается к барабану шнур автоматически наматывается на него за счет установленной на барабане пружины.
Как показано на фиг. 2-4, канал 9, имеет поперечную щирину W; меньшую, чем ноперечный размер Wj таза 8, но немного большую, чем поперечный разрез тележек 25 н 26. Поэтому, когда подъемный элемент 56, установленный на тележках 25 и 26, расположен в самом нижнем положении, то тазы 8 находятся на первом этаже А. С другой стороны, когда подъемный стол 37 размещен в его верхнем положении, тазы 8 поддерживаются .подъемным элементом 56 и свободны от пола А. Для предотвращения отклонения тазов 8 в канале 9 устанавливают направляющие элементы 57 так, что поперечная ширина пространства между направляющими элементами 57 немного больше, чем поперечный размер тазов 8. Каждый направляющий элемент 57 содержит кронщтейн 58, жестко установленный на краю канала 9, вертикальный вал 59, опирающийся на кронштейн 58, и щарнирно установленное на валу 59 горизонтальное колесо 60. Как показано на фиг. 1-5, во время подачи пачки нитей в таз 8, расположенный в канале 9, пустой таз 8 тележкой 25 переносится в позицию 61 и за один раз до окончания получения полностью упакованного таза 8 на позиции 62 тележки 25 и 26 смещаются к позициям 6 и 62 соответственно по сигналам от компьютера. Включаются двигатели 40, подъемные столы 37 тележки 25 (26) достигают верхних положений. Этот режим показан на фиг. 3 пунктир юй линией. Согласно движению подъемных столов 37, пустой таз 8, расположенный в позиции 61 и полностью упакованный таз 8, расположенный в позиции 62, поднимаются соответствующими подъемными столами 37 от пола А. При этом режиме управляющий компьютер вырабатывает сигнал для перемещения пустого таза 8 с позиции 61 на позицию 62 и сигнал для перемещения полностью упакованного таза 8 с позиции 62 на позицию 63 по ходу движения. В соответствии с сигналами управляющего компьютера включаются двигатели 50 тележек 25 и 26 так, что последние смещаются к позициям 62 и 63. Для останова тележек 25 и 26 в соответствующих позициях 62 и 63 в канале 9, как показано на фиг. 6, установлены стопоры 64, воздействующие на конечные выключатели 65 тележек 25 и 26. Каждый стопор 64 содержит соленоид 66, снабженный плунжером 67 и установленный в отверстии 68, выполненном в боковой стенке канала 9.,. На фиг. 7 показаны стопоры 69, установленные в горизонтальных отверстиях 70 и выполненные в боковой стенке 71 канала 9 на позиции 72 хранения так, что расстояние между двумя соседними отверстиями 70 намного больше длины тележки 26 по каналу 9. Каждый стопор 69 имеет соленоид 73, снабженный плунжером 74, и работает с конечным выключателем 65 тележки 26. На краях канала 9 над соответствующими стопорами 69 установлены детекторы 75. Каждый детектор 75 содержит конечный выключатель 76, жестко установленный на краю канала 9# и крыщку 77, смонт рованную подвижно на конечном выключателе 76 с помощью щупа 78 и пары . 79 растяжения. Когда на крышке 77 нет таза 8, она выступает над поверхностью пола А (на фиг. 7 показано пунктирной линией) . Вместо стопоров и детекторов для останова тележки 26 на раме 33 с передней и задней сторон тележки могут быть установлены два конечных выключателя (на чертежах не показаны), так что щуп каждого выключателя может контактировать с дном таза 8, когда тележка 26 касается этого таза. Тележки 28 и 30 используются для переноса полностью упакованных тазов 8 с позиции 80 хранения канала 9 на позицию 81 подачи канала 13 через поперечный канал 10, а также для переноса пустых тележек с позиции 82 подачи на позицию 83 подготовки канала И через поперечный канал 10. Тележка 28 имеет две боковые рамы 84 и 85, отходящие параллельно вниз от опорной рамы 86 с обоих ее концов, и два горизонтальных вала 87 н 88, шарнирно установленных на боковых рамах 84 и 85. На концах валов 87 и 88 жестко закреплены две пары колес 89 и 90. На раме 86 установлен реверсивный двигатель 91. Механизм 92 передает энергию от двигателя 91 на вал 88. Кабестан 93 удерживает шнур для привода двигателя тележки 30. Между двигателем 91 и источником питания имеется магнитное реле 94 с конечным выключателем 95, который обнаруживает нахождение тележки 30 в заданной позиции на тележке 28. На раме 86 тележки 28 установлены рельсы 96, а вниз от рамы 86 отходят два вертикальных стержня 97. Тележка 30 аналогична тележкам 25 и 26. Движение тележки 30 управляется ifoсредством кабестантной системы 93. Для привода тележки 30 по каналам 9 и II н каналам 13 н 14 опорная рама 36 должна находиться на уровне пола этих каналов. Глубина L каналов 0 и 12 должна быть больще глубины каналов jO, II и 13, 4. Расстояние между верхней поверхностью опорной рамы 86 и полом каналов 10 и 12 обозначено j, i Е,+ j. Ширила каналов Ш и 12 больше ширины W тазов 8 (см. фиг. 2 и 3). Как показано на фиг. 10, в канале 10 установлены два клапанных стопора 98. Каждый стопор 98 содержит соленоид 99, снабженный плунжером 100, и клапан 101, жестко закрепленный на верхнем конце плуижера 100. Клапан 01 содержит поршень 02, расположенный с возможностью скольжения в поршневом цилиндре 103, поршневой шток 104, соединенный с поршнем 102, .и головку 106, выполненную на свободном конце поршневого штока 104. В. цилиндре 103 размещена пружина 06 растяжений, чтобы по;ь пружинить поршень 102. Клапан {О при вйлючевнн соленоида 99 за гимает положение, S котором головка 105 контактирует с передней и задней боковыми поверхностями 107 спорной pasib 86 тележкй 28. Соленоид 69 размещен с наружной стороны направляющих рельсов 108.
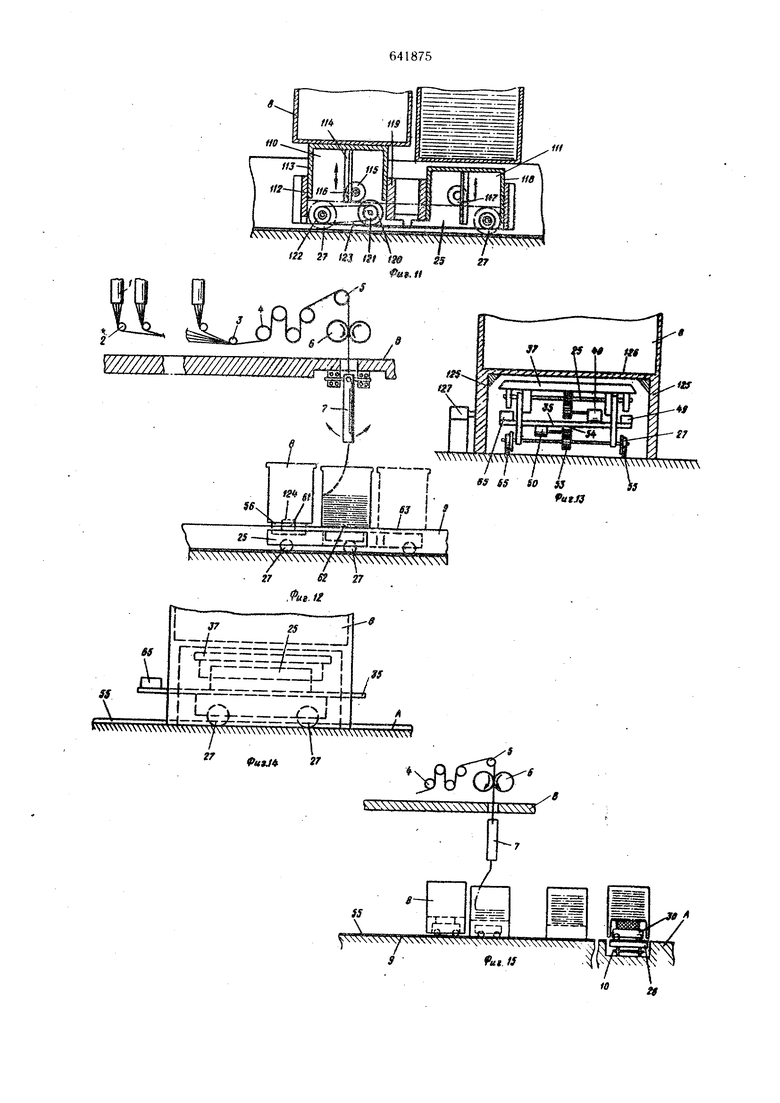
На фиг. II и 12 показаны варианты исполяенкя тележек 2S и 26, где тележка 25 (26) может перемевдаться по каналу 9 и быть в позиции 109 канала 9.
25(26) содержит два подъемных 9J eMettTa 110 и П, спосо&иых неремеш,атьt i вверх-вийз. Для направления элементов НО и III тележка 25(26) снабжена йанраачяющив элементом 112. Подъемный элемент 10 имеет вертикальную боковую стенку ПЗ и вертикальный брус 114 с зубчатой рейкой. На тележке 25(26) установлен реверсивный двигатель 115, а шестерни 116, закревленная на его валу, зацевлдется е зубчатой рейкой бруса П4 для перемещений ггодъемного эле1йента 110. Подъемные элементы ПО я II останавливаются конечными выклкетателями (на чертежах не показаны), отключают соответствующие двигатели tJ§ и М7, от источника питания. Элемеиты и И9 представляют бокоаую подъемного элемента 111.
На тележке 2§(2в; установлен реверсивный двигатель 520, В|}йводящий один из залов колес 2 через трансмиссию, содержащую шкив 21,.закрепленный на валу двигателя 120, шкив 122, закрепленный на валу колес 27, и бвскш1€чный ремень 123. Напрааление вращения реверсивных двигателей , 117 и 120 изменяется соответствуюЩИЕ)1${ реверсивными магнитными реле.
Тележка 25(2&) снабжена конечным выклк ч8тгелем 124, включанэщимся стопорами, раэмещеннымн в канале 9, в позиции 6i и 62. На фиг. 13-15 показан другой вариант исполнения тележки 25(26). В этом варианте каналы 9 и iO выполняются на попу А парой направляющих рельсов 55 (см. фиг. 15), тазы 8 снабжены парой лап 125, отходящих вниз (см. фиг. 13) таким образом, что образ маанное между ними и днищем 1.26 пространство достаточно для вмещения тележки 25(26).
При перемещении подъемного стола 37 в верхнее положение стол 37 перемещает таз 8 аверх -так, что нижние края лап 125 отделяются от пола А. С другой стороны, когда подъемный стол 37 находится в нижнем положении, то нижние края лап 125 располагаются на полу А, а стол 37 отделяется от днища 126 и таза 8. В этом случае тележка 25(26) может перемещаться по рель. сам 55 без тазов 8. Поскольку два блока тележки 25(26) закрыты лапами 125 таза 8, то опорная рама 35 выполнена большей, чем размер таза 8, чтобы можно было расположить конечный выключатель 65 за лапами 125 (см. фиг. 13). Стопор 127 включается компьютером.
На фиг. 16 показана модифицированная
Система транспортировки тележки 25(26) по
варианту ее исполнения (фиг. 11 и 12).
В этом варианте вместо хранения заполненных тазов 8 на позиции 80 хранения канала 9, а затем подачи их на позицию 81 канала 13 с позиции 80, полностью заполненный таз 8 транспортируется с позиции 63 на позицию 81 подачи каналов 15, 16, 19 и 20 комбинированным транспортным оборудовайием, содержащим тележки 28 н 30, по сигналу от компьютера, когда получают полностью заполненный таз 8.
Во второй модифицированной системе (фиг. 17) вместо вспомогательных каналов 23 и 24 используется пара параллельных каналов 128 и 129, которые соединены с поперечными каналами 10 и 12 на позициях 130- 133.
Вспомогательные каналы 128 и 129 используются для хранения избытка полностью загруженных тазов 8 таким образом, что этот избыток с помощью тележки 30 так же, как для транспортировки в канал 13, подается в канал 128. Когда требуется транспортировать полностью заполненные тазы 8, хранящиеся so вспомогательном канале 128, к одному из ответвленных каналов 13, их сначала переносят из канала 128 к каналу 129 5 тележкой 30, используемой в канале 12, а затем полностью заполненные тазы 8 подают на позицию подачи одного из ответвленных каналов 13. Также целесообразно до подачи к ответвленному каналу 13 хранить полностью загруженные тазы 8 в канале 129.
Формула изобретения
I. Транспортная система для перемещения тазов с волокнистой лентой от мащин для формирования синтетического волокна, содержащая средство для перемещения тазов, установленное в направляющих каналах, расположенных вдоль мащин и средство автоматического управления процессом перемещения тазов, включающее конечные, выключатели, связанные с приводным механизмом, отличающаяся тем, что, с целью повышения надежности системы в эксплуатации, средство для перемещения тазов имеет две тележки, установленные одна на другой с возможностью перемещения во взаимно перпендикулярных направлениях, верхняя из которых содержит опорную раму и смонтированный на ней подъемный стол с механизмом его вертикального перемещения.
2. Система по п. 1, отличающаяся тем, что механизм вертикального перемещения стола содержит эксцентрик с двумя выступами на торцовой поверхности, контактирующими с конечными выключателями для фиксацин верхнего и нижнего положений стола.
#/ SI S3 «а г ft
L
- fsM4- -f-- MfJ j.., е/ Л7 1
гзг 12Приоритет по п. I - 22.08.73, по п 2 - 23.08.73.
Источники информации, принятые во внимание при экспертизе:
I. Авторское свидетельство СССР № 218024, кл. D 01 G.21/00, 1966.
/ «
(S
(Г
f
IB
3)/
я
гг
W
W
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| Устройство для перемещения форм | 1971 |
|
SU646902A3 |
| Автоматическая линия для изготовления стержней | 1990 |
|
SU1759533A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГАЛЬВАНИЧЕСКОЙ И ХИМИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 1967 |
|
SU205492A1 |
| Автоматическая линия для изготовления стержней | 1986 |
|
SU1386359A1 |
| Поточная линия | 1975 |
|
SU590142A1 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| Автоматизированная система паллетного хранения высокой плотности | 2023 |
|
RU2814123C1 |
| Автоматизированный комплекс для штамповки деталей из полосового материала | 1985 |
|
SU1296269A1 |
777// У7////////: Щл)/ //// ////// / tjj SS г S . 2
Риг.Ъ
37 SS «г t asufff з
JLLiJ
sasatetofaUE
Sf } fg s S3 3S SS e.4
7«
7J
;§ Я
Л7
ff 89
««. /77777f7T(77777y 777777777Y777/77 iM fS et92l@g 8S
лг
X
§г зг &0 t.l9 т 27 ш at т si 7S2 27
г/
гг
itfj . ti
ОСТ
x гт
, ,
fat. tS
0, ,f
/ / гЛ
