рьу первый 8, второй 9 и третий 10 элементы И и выход 11 устройства.
Устройство работает об разом..
С блока 1 в интерполятор 2 вводят И1ф: рмацию о начапьных точках дуг окружностей исходной эквидистанты или о величине перемещения по коэффициентным осям прямолинейных участков и о суммарном перемещении по координатным осям.
Величину радиуса исходной эквкйистан ты с блока 1 вводят в регистр 7, ив Которого дополнительный код этой величины передают в сумматор 5. Кроме того, с блока 1 передают информацию о скорости обработки изделия в блок 3 н информацию о виде обрабатываемого контура (внутренний ипи внешний) в коммутатор 4, При этом в регистр писываЮт заданную поправку, а в коммутатор 4 информацию о знаке этой поправки.
При работе интерполятора 2 вырабатываемые им имйульсы приращетшя . по оси абсцисс через элемент И 10 проходят на выход устройства 11, причем элемент И 10 открывают сигналом с коммутатора 4, :
По каждому импульсу, вырабатываемому интерполятором 2, подаётся команда на перенос содержимого регистра 6 в сумматор 5
После переполнения сумматор 5 посылает команду на перенос дополнительного кода величин радиуса исходной экви дистанты из регистра 7 в сумматор 5 и :на переключение коммутатчэра 4.
Если радиус скорректированной эквидистанты больше радиуса исходной (обjpaбaтывaeтcя внешний контур и знак поправки положительный или же обрабатьшается внутренний контур и знак поправки отрицательный), то от коммутатора 4 дают команду на закрытие элемента И 9 и на открытие элемента И 8 (поправка имеет положительный Знак, если радиус инструмента увеличен) При этом очередной тактовый импульс с блока 3 проходит через элемент И 8 на выход устройства.
Таким образом осуществляется очереная коррекция в виде единичного приращения. Одновременно с блока 3 на коммутатор 4 подается команда на открыти элементам 9 изакръгтие элёмента И 8
Если же радиус скорректированной эквчдистанты меньше исходной,.То от
коммутатора 4 дают сигнал на закрытие элемента И 10. При этом очередной импульс, вырабатываемый интерполятором 2, не приходит на выход 11. Затем от
блока 3 на коммутатор 4 дают коман ду на открытие элемента И Ю. Для того чтобы в последнем случае, когда радиус скорректированной эквидистанты меньше исходной, коррекция была выполне на в момент, когда погрешность прейысит величину единичного приращения, а не с опозданием на один щаг, в сумматор 6 необходимо вводить величи1у заданной поправки с упреждением. Для
&ТОГО,первую команду На перенос .-содержимого регистра 6 в сумматор 5 подают от коммутатора 4 после ввода информации с блока 1,
Следует отметить, что при обработке внутреннего контура дуги малого радиуса может оказаться, что величина поправки больше радиуса исходной эквидистанты. Это возможно, если . величина задазтоой поправки имеет отрицательтшш зна5с Такие случаи должны быть исключены..
При наличии на обрабатываемом изделии втогтренних контуров с малыми радиусами, сравнительными по величине
с радиусом -фрезы, следует исходную эквидиста1Йту рассчитывать для наименьшего радиуса фрезы, чтобы знак поправки был положительным.
В случае применения промежуточной
записи на магнитную ленту нет необходимости изменять программу с изменением величины поправки, В атом случае импульсы коррекции с соответствующим йнаком следует наносить на отдельную
дорожку для каждой координатной оси для случая наибольшей возможной заданной поправки, а устройство управления станком должно сх)держать импульсные умножители, которые пропускают чабть
этих импульсов, пропорциональную беличине действительного значения поправ ки. .
Использование данного устройства позволяет значительно упростить системы программного управления станками, в Том числе -Исистемы с записыо программы на магнитную ленту.
55 Формула изобретения
Х стройство Для коррекции эквидистан- ты в станках с программным управле-
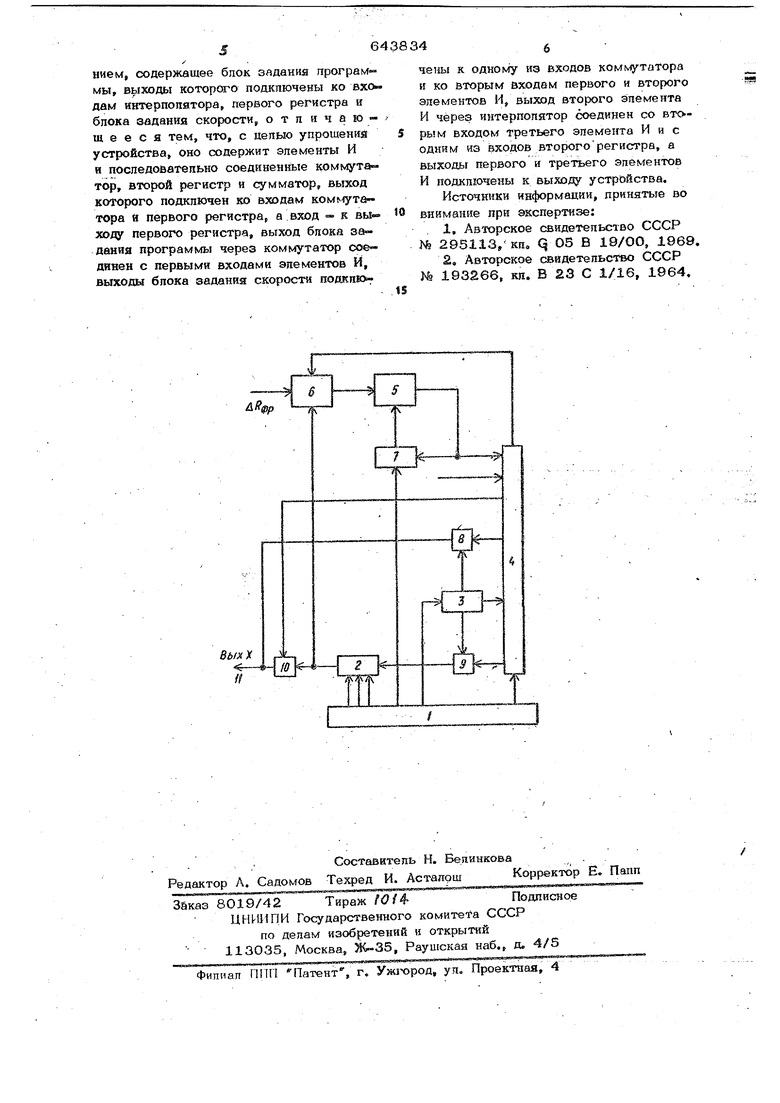
нием, содержащее блок заданна програм мы, вь1ходы которого пошслючены ко входам интерполятора, первого регистра и блока задания скорости, отличаю- щ е е с я тем, что, с цепью упрощенна устройства, оно содержит элементы И и последоватепьно соединенные коммута тор, второй регистр и сумматор, выход которого подключен ко входам тора и первого регистра, а вход к выходу первого регистра, выход блока задания программы через коммутатор сое динен с первыми входами эпементов И, выходы бпока задания скорости подкпк
чаны к одному из входов коммутатора и ко вторым входам первого и второго элементов И, выход второго элемента И через интерполятор соединен со вторым входом третьего элемента И и с одним из входов второгорегистра, а выходы первого и третьего эпементов И подключены к выходу устройства.
Источники информации, принятые во внимание при экспертизе: . 1, Авторское свидетельство СССР № 295113/кпо q 05 В 19/00, 1969.
2 Авторское свидетельство СССР № 193266, кн. В 23 С 1/16, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для контурного программного управления станком | 1978 |
|
SU716020A1 |
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
| Линейно-круговой интерполятор | 1978 |
|
SU896596A2 |
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
