(54) СТАНЦИЯ ДЛЯ ЗАГРУЗКИ НА ХОДУ СЫПУЧИМИ МАТЕРИАЛАМИ ТРАНСПОРТНЫХ СРЕДСТВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для загрузки на ходу непрерывно перемещаемых транспортных емкостей | 1980 |
|
SU1109355A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| Установка для многострунной резки и укладки кирпича на сушильные вагонетки | 1984 |
|
SU1186497A1 |
| Поточная линия для изготовления металлоконструкций | 1980 |
|
SU961911A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Автоматическая линия для изготовления строительных изделий | 1979 |
|
SU893555A2 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Устройство для транспортирования сыпучих грузов в системах трубопроводного контейнерного пневмотранспорта | 1979 |
|
SU787306A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Установка для резки и укладки кирпича-сырца на консольные сушильные вагонетки | 1981 |
|
SU1022814A1 |
I
Изобретение относится к области : пневматического транспорта, а именно к станциям для загрузки на ходу сыпучими материалами транспортных средств и может быть использовано в горнодобьгаающей и угольной промышлённостях. Известна станция для загрузки на ходу сьшучими- материалами преимущественно контейнеров пневмотранспортных установок, содержащая бункер, йод которым установлены поворотные секционные дозаторы, каждый из которых вы.полнен в виде полого цилиндрического барабана с люками для загрузки и выгрузки материала. Оси вращения дозаторов -расположены перпендикулярно продольной оси труЬопровода, а люки дозаторов смещены один относительно другого по ходу вращения на угол, обеспечивакхций последовательную загрузку всеми дозаторами каждого очередного контейнера. Дозаторы снабжены общим дпя них приводом, скорость вращения которого синхоонияипована со скорость
протяжки состава контейнеров под погрузкой.
Недостатком зтой станп ти я-вляется то, что при загрузке крупных фракций сыпучего материала вследствие его попадания между бункером и дозаторами происходит заклинивание последних. Кроме.того, эта станция имеет небольшую производительность из-за поочередной загрузки контейнера дозаторами.
Известна станция для загрузки на ходу сыпучими материалами трансцортных средств, содержащая раму со смонтированными на ней направлякнцими, тележки с дозирующими емкостями, установленные в направляющих, и механизм синхронного движения тележек с дозирующими емкостями и транспортных средств.
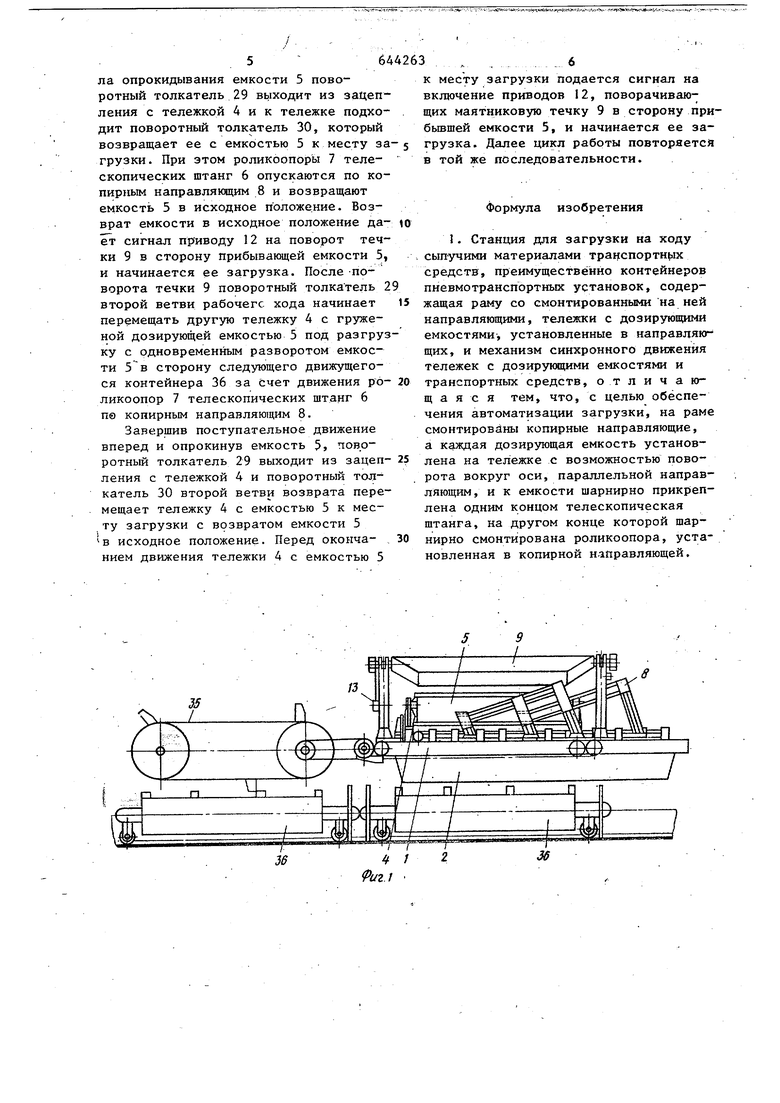
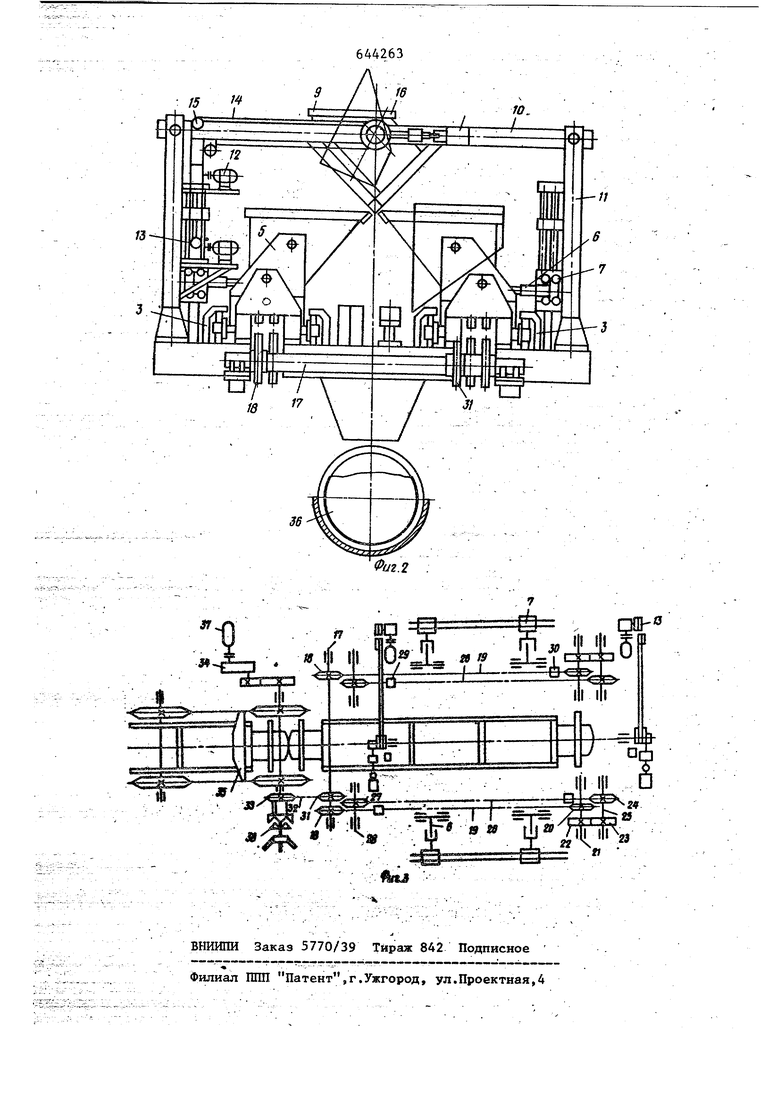
Эта станция обеспечивает загрузку крупнокусЛовых фракций сыпучего материала и высокую производительность загрузки. Однако, вследствие того. что разгрузка дозирующей емкости проиеходит через выпускное отверстие в нижней ее части, необходимо периодически закрывать и открывать это отвер стие, что усложняет процесс загрузки транспортных средств. Цель изобретения - обеспечение автоматизации загрузки контейнеров и других транспортных средств. Это достигается тем, что на раме смонтированы копирные направляющие, а каждая дозирующая емкость установлена на тележке с возможностью поворота вокруг оси, параллельнойнаправ.ляющим, и к емкости шарчирно прикреплена одним концом телескопическая штанга, на другом конце которой шармирно смонтирована роликоопора, установленная в копйрной направляющей. На фиг. 1 изображена предлагаемая станция, общий вид; на фиг. 2 - то же, вид сзади; на фиг. 3 - кинематическая схема станции. На раме 1 смонтирован бункер 2 и по обе стороны от него направляющие 3, в которых установлены передвиж ные тележки 4с дозирующими емкостями 5. Каждая дозирующая емкость 5 установлена на тележке с возможностью поворота вокруг оси, параллельной направляющим .3. Дозирующие емкости 5 шарнирно соединены с телескопическими штангами 6, на свободном конце которых шарнирно смонтированы роликоопоры 7, установленные в копирныхнаправ ляющих 8, которые предназначены для опрокидывания емкостей 5 и возврата их в исходное положение. Копирные на правляющие 8 смонтированы на раме 1. Над дозирующими ёмкостями 5 установлена поворотная маятниковая течка 9, которая смонтирована на балках 10 и колоннах 11. Для поворота маятниковой течки 9 на колоннах 11 установле ны два привода 12, осуществляющие ее поворот через приводные барабаны 13, Тросовые передачи 14, отклоняющие бл ки 15, установленные на балках 10, и барабаны 16 поворота, установленные на осях поворота маятниковой течки. На раме 1 смонтирован приводной вал 17, на котором установлены звездочки 18, соединенные тяговыми цепями 19, образующими две ветви возврата емкостей 5, со звездочками 20, ра положенными на валах 21. На валах 21 расположены также шестерни. 22, находящиеся в зацеплении с шестернями 23, установленными со звездочками 24 на валах 25. ШестеЕ)НИ 22 и 23 обеспечивают изменение направления вращения звездочек 24 относительно звездочек 20. Звездочки 24 соединены тяговыми цепями 26, образзпощими две ветви рабочего хода, со звездочками 27, установленными на определенном расстоянии от звездочек 24 на осях 28. В тяговые цепи 26 встроены поворотные толкатели 29, предназ1|аченные для перемещения тележек 4 с гружеными дозирующими емкостями 5 на величину рабочего хода. В тяговые цепи 19 встроены поворотные толкатели 30, обеспечивающие возврат тележек 4 с емкостями 5 к месту загрузки. На приводном валу 17 установлена также звездочка 31, приводимая во вращение через цепную передачу 32 от звездочки 33, установленной на приводном валу 34 механического толкателя 35, предназначенного для н Прерывной подачи контейнеров 36 пневМотранспортной установки. Станция работает следующим образом. После подачи контейнера 36 толкателя 35 под загруженную дозирующую емкость 5 привод 37 толкателя 35 выключается. Зубчатой муфтой 38 включается звездочка 33, затем включается привод 37 и подается команда на приводы 12, поворачивающие маятниковую течку 9 для загрузки второй дозирующей емкости 5. После этого начинается параллельное синхронное движение, контейнера 36 от толкателя 35 и тележки 4 с груженой дозирующей емкостью 5 от поворотного толкателя 29, перемещение которого обеспечивает звездочка 33, которая через цепную передачу 32 вращает звездочку 31. Роликоопоры 7 телескопических штанг 6 в это время движутся по горизонтальным участкам копирных направляющих 8. Тележка 4 с груженой емкость 5 перемещается на величину рабочего хода и емкость 5 одновременно поворачивается в сторону движущегося контейнера 36. Поворот емкости 5 относительно ее оси вращения осуществляется телескопическими штангами 6, роликоопоры 7 которых поднимают по копирным направляющим 8, а конца штанг 6 через шарниры разворачивают емкость 5. Разность расстояния между емкостью 5 и роликоопорами 7 компенсируется вдвижениеМ и раздвижением телескопических штанг 6. После совершения полного цикла опрокидывания емкости 5 поворотный толкатель 29 выходит из зацепления с тележкой 4 и к тележке подходит поворотный толкатель 30, который возвращает ее с емкостью 5 к месту за грузки. При этом роликоопоры 7 телескопических штанг 6 опускаются по копирным направляющим 8 и возвращают емкость 5 в исходное положение. Возврат емкости в исходное положение дает сигнал приводу 12 на поворот течки 9 в сторону прибывающей емкости 5, и начинается ее загрузка. После поворота течки 9 поворотный толкатель 2 второй ветви рабочего хода начинает перемещать другую тележку 4 с груженой дозирующей емкостью 5 под разгруз ку с одновременным разворотом емкости 5 в сторону следующего движущегося контейнера 36 за счет движения роликоопор 7 телескопических штанг 6 па копирным направляющим 8. Завершив поступательное движение вперед и опрокинув емкость 3 поворотный толкатель 29 выходит из зацепления с тележкой 4 и поворотный толкатель 30 второй ветви возврата перемещает тележку 4 с емкостью 5 к месту загрузки с возвратом емкости 5 в исходное положение. Перед оконча- , нием движения тележки 4 с емкостью 5 6 3 6 к месту загрузки подается сигнал на включение приводов 12, поворачивающих маятниковую течку 9 в сторону прибьшшей емкости 5, и начинается ее загрузка. Далее цикл работы повторяется в той же последовательности. Формула изобретения 1. Станция для загрузки на ходу сып-учими материалами транспортных средств, преимущественно контейнеров пневмотранспортных установок, содержащая раму со смонтированными на ней направляющими, тележки с дозирующими емкостями, установленные в направляю щих, и механизм синхронного движения тележек с дозирующими емкостями и транспортных средств, отличающаяся тем, что, с целью обеспечения автоматизации загрузки, на раме смонтированы копирные направляющие, а каждая дозирующая емкость установлена на тележке с возможностью поворота вокруг оси, параллельной направляющим, и к емкости шарнирно прикреплена одним концом телескопическая штанга, на другом конце которой шарнирно смонтирована роликоопора, установленная в копирной направляющей. : J5 36 Фиг.2 y % ip . z I I
