(54) ВАКУУМНЫЙ ЗАХВАТНЫЙ ОРГАН

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Вакуумный захватный орган | 1980 |
|
SU925820A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Захватное устройство для грузов в пакетах | 1983 |
|
SU1105443A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ ОРГАН | 1972 |
|
SU342712A1 |
1
Изобретение относится к механизации и автоматизации штамповочного производства и может быть использовано для захвата заготовок при подаче их в рабочую зону пресса или другой технологической машины.
Известен вакуумный захватный орган, содержащий подвижный вдоль своей оси полый корпус с присоской, .расположенный в полости корпуса подвижный вдоль его оси и подпружиненный относительно него шток с центральным отверстием, связывающим полость присоски с атмосферой, закрепленный на штоке клапан, перекрывающий центральное отверстие и снабженный механизмом управления. Клапан выполнен в виде установленного перпендикулярно продольной оси штока валика с диаметральным отверстием, а механизм управления выполнен в виде храпового колеса, закрепленного на валике, и двух собачек, одна из которых шарнирно закреплена на корпусе с возможностью периодического взаимодействия схраповым колесом и подпружинена к штоку, а другая шарнирно закреплена на штоке с возможностью взаимодействия с храповым колесом и подпружинена к штоку I.
Известный вакуумный захватный орган недостаточно надежен в работе, так как недостаточно надежно создает вакуум в полости присоски. Для захвата заготовки и ее освобождения. корпус известного устройства необходимо перемещать вниз на позиции загрузки и на позиции выгрузки, что снижает производительность процесса подачи заготовок в рабочую зону пресса.
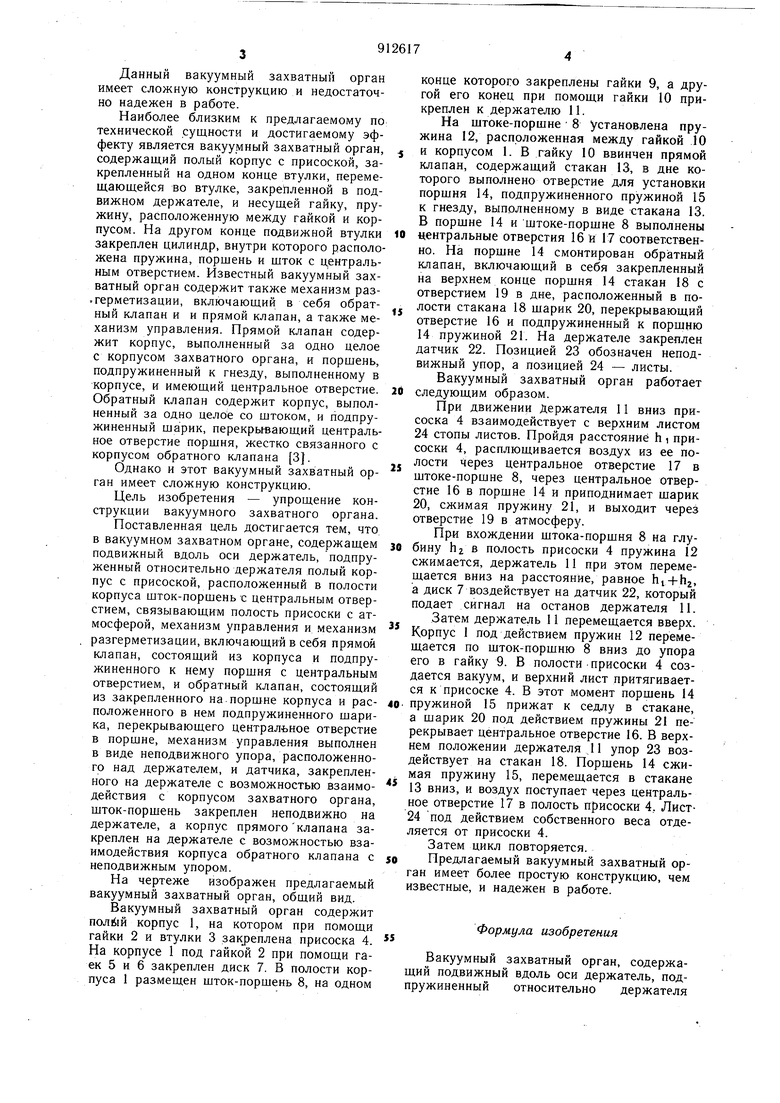
Известен вакуумный захватный орган, содержащий полый корпус с присоской, укрепленный в держателе, подвижном в направлении, перпендикулярном поверхности захватываемой заготовки, и расположенный в корпусе подвижный в направлении движения держателя щток, двуплечий рычаг, установленный на оси в держателе с возможностью взаимодействия одним концом с установленным на пути движения держателя неподвижным упором и щарнирно связанным с другим концом со штоком, снабженным 20 поршнем, размещенным в выполненной в корпусе для этого цилиндрической полости, соединенной отверстием с полостью присоски, а также пружиной, действующей на порщень в направлении, обратном направлению движения держателя 2. Данный вакуумный захватный орган имеет сложную конструкцию и недостаточно надежен в работе. Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является вакуумный захватный орган, содержащий полый корпус с присоской, закрепленный на одном конце втулки, перемещающейся во втулке, закрепленной в подвижном держателе, и несущей гайку, пружину, расположенную между гайкой и корпусом. На другом конце подвижной втулки закреплен цилиндр, внутри которого расположена пружина, порщень и щток с центральным отверстием. Известный вакуумный захватный орган содержит также механизм раз, герметизации, включающий в себя обратный клапан и и прямой клапан, а также механизм управления. Нрямой клапан содержит корпус, выполненный за одно целое с корпусом захватного органа, и порщень, подпружиненный к гнезду, выполненному в корпусе, и имеющий центральное отверстие. Обратный клапан содержит корпус, выполненный за одно целое со штоком, и подпружиненный щарик, перекрьгеающий центральное отверстие порщня, жестко связанного с корпусом обратного клапана 3J. Однако и этот вакуумный захватный орган имеет сложную конструкцию. Цель изобретения - упрощение конструкции вакуумного захватного органа. Поставленная цель достигается тем, что в вакуумном захватном органе, содержащем подвижный вдоль оси держатель, подпруженный относительно держателя полый корпус с присоской, расположенный в полости корпуса щток-порщень с центральным отверстием, связывающим полость присоски с атмосферой, механизм управления и механизм разгерметизации, включающий в себя прямой клапан, состоящий из корпуса и подпружиненного к нему порщня с центральным отверстием, и обратный клапан, состоящий из закрепленного на поршне корпуса и расположенного в нем подпружиненного щарика, перекрывающего центральное отверстие в поршне, механизм управления выполнен в виде неподвижного упора, расположенного над держателем, и датчика, закрепленного на держателе с возможностью взаимодействия с корпусом захватного органа, щток-порщень закреплен неподвижно на держателе, а корпус прямогоклапана закреплен на держателе с возможностью взаимодействия корпуса обратного клапана с неподвижным упором. На чертеже изображен предлагаемый вакуумный захватный орган, общий вид. Вакуумный захватный орган содержит ПОЛЙ1Й корпус 1, на котором при помощи гайки 2 и втулки 3 закреплена присоска 4. На корпусе 1 под гайкой 2 при помощи гаек 5 и 6 закреплен диск 7. В полости корпуса 1 размещен шток-поршень 8, на одном конце которого закреплены гайки 9, а другой его конец при помощи гайки 10 прикреплен к держателю И. На щтоке-порщне 8 установлена пружина 12, расположенная между гайкой 10 к корпусом 1. в гайку 10 ввинчен прямой клапан, содержащий стакан 13, в дне которого выполнено отверстие для установки порщня 14, подпружиненного пружиной 15 к гнезду, выполненному в виде стакана 13. В порщне 14 и щтоке-порщне 8 выполнены центральные отверстия 16 и 17 соответственно. На порщне 14 смонтирован обр;атный клапан, включающий в себя закрепленный на верхнем конце порщня 14 стакан 18 с отверстием 19 в дне, расположенный в полости стакана 18 щарик 20, перекрывающий отверстие 16 и подпружиненный к порщню 14 пружиной 21. На держателе закреплен датчик 22. Позицией 23 обозначен неподвижный упор, а позицией 24 - листы. Вакуумный захватный орган работает следующим образом. При движении Держателя 11 вниз присоска 4 взаимодействует с верхним листом 24 стопы листов. Пройдя расстояние h i присоски 4, расплющивается воздух из ее полости через центральное отверстие 17 в щтоке-порщне 8, через центральное отверстие 16 в порщне 14 и приподнимает щарик 20, сжимая пружину 21, и выходит через отверстие 19 в атмосферу. При вхождении щтока-порщня 8 на глубину hi в полость присоски 4 пружина 12 сжимается, держатель 11 при этом перемещается вниз на расстояние, равное hi+h, а диск 7 воздействует на датчик 22, который подает сигнал на останов держателя И. Затем держатель 11 перемещается вверх. Корпус 1 под действием пружин 12 перемещается по щток-порщню 8 вниз до упора его в гайку 9. В полости присоски 4 создается вакуум, и верхний лист притягивается к присоске 4. В этот момент поршень 14 пружиной 15 прижат к седлу в стакане, а щарик 20 под действием пружины 21 перекрывает центральное отверстие 16. В верхнем положении держателя ,11 упор 23 воздействует на стакан 18. Порщень 14 сжимая пружину 15, перемещается в стакане 13 вниз, и воздух поступает через центральное отверстие 17 в полость присоски 4, Лист24 под действием собственного веса отделяется от присоски 4. Затем цикл повторяется. Предлагаемый вакуумный захватный орган имеет более простую конструкцию, чем известные, и надежен в работе. Формула изобретения Вакуумный захватный орган, содержащий подвижный вдоль оси держатель, подпружиненный относительно держателя
