1
Изобретение относится к области контроля и учета работы транспортных средств и может быть использовано для контроля и учета загрузки а-втосамосвалов на предприятиях горнорудной, химической промышленности, черной -и цветной металлургии, промышленности строительных материалов и на предприятиях других отраслей промышленности, связанных с добычей и транспортировкой полезных ископаемых.
Известно устройство для контроля и учета работы автосамосвалов, содержащее узлы распознавания, контроля, учета и отображения информации 1. Однако оно не позволяет контролировать техническое состояние и загрузку автосамосвалов непосредственно в точках погрузки. Это приводит к снижению эффективности использования автотранспорта либо из-за его недогруза, либо из-за повышенного износа, связанного с нерегрузом -и вызывающего увеличение времени простоев на ремонте.
Наиболее близким из известных устройств к предлагаемому по технической сущности является устройство для автоматического контроля работы автосамосвалов, содержащее блок контроля технического состояния автосамосвала, подключенный к носителю кодовой информации и блоку индикации неисправности, приемодекодирующий блок, один из выходов которого соединен с одним из входов первого ключа, блок памяти, выход которого подключен к блоку индикации погрузки и к
одному из входов второго ключа, выход которого соединен с блоком передачи информации, блок сравнения, выход которого подключен к одному из входов блока памяти, к блоку индикации и к второму ключу| 2.
Однако известное устройство сложно и обладает низкой надежностью.
Целью изобретения является упрощение и повышение надежности устройства.
Это достигается тем, что в него введены блок определения грузоподъемности, блок распознавания и маршрутизации и блок измерения загрузки ковша, который подключен к другому входу первого ключа, выход
которого соединен с другим входом блока памяти, выход которого соединен с одним из входов блока сравнения, блок распознавания и маршрутизации подключен к входу приемо-декодйрующего блока, другой
выход которого через блок определения грузоподъемности соединен с другим входом блока сравнения.
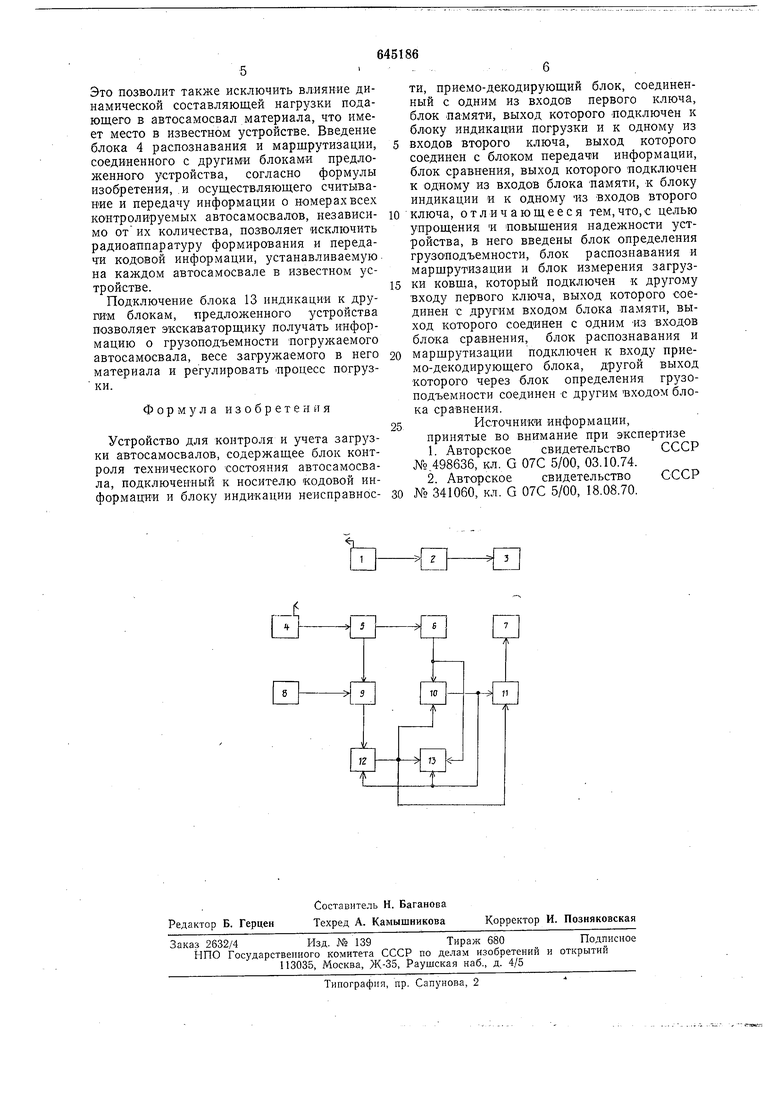
Блок-схема устройства представлена на чертеже. Она содержит носитель 1 кодовой
информации и блок 2 контроля техническо3го состояния автосамосвала, соединенный с Носителем 1 кодовой информации и блоком 3 индикации неисправности, которые установлены на каждом из контролируемых автосамосвалов, причем считывание5 информации с носителя 1 кодовой йнформации осуществляется блоком 4 распознавания и маршрутизации, установленным на контрольном пункте и соединенным с приемо-декодирующим блоком 5, один выходю которого подключен к блоку 6 определения грузоподъемности, блок 7 передачи информацин, блок 8 измерения загрузки ковша, соединенный с первым ключом 9, который подключен такл е к другому выходу прие-15 мо-декодируюш;его блока 5, блок 10 сравнения, соединенный с блоком 6 определения грузоподъемности и через второй ключ 11-с блоком 7 передачи информации. блок 12 памяти, подключенный к первому20 ключу 9, блоку 10 сравнения, к второму ключу Пик блоку 13 индикации погрузки, который соединен также с блоком 6 определения грузоподъемности и с блоком 10 сраенения.25 Устройство работает следующим образом, Каждый из контролируемых автосамосвалов оснащается носителем 1 кодовой информации, блоком 2 контроля техническо-зо го состояния и блоком 3 индикации неисцравности. Носитель 1 информации выполняется, например, в виде решетчатой конструкции, содержащей постояиио закрепленные кодовые элементы, несущие ин-35 формацию о номере автосамосвала и подвижные элементы технического состояния, управляемые блоком 2 контроля технического состояния, содержащим датчики контролируемых параметров и схему формиро-40 вания сигналов технического состояния автосамосвала. Считывание информации с носителя 1 кодовой информации осуществляется блоком 4-распознавания и маршрутизацн1и, установленным на контрольном45 пункте, который расположен перед разветвлением дорог к различным точкам погрузки. После считывания информации о номере и техническом состоянии автосамосвала, прошедшего контрольный пункт,50 блок распознавания и маршрутизации 4 формирует и индицирует маршрут следования автосамосвала. Если автосамосвал исправлен (все контролируемые параметры технического состояния автосамосвала на-55 ходятся в пределах нормы и блок 2 контроля технического состояния автосамосвала устанавливает в носителе 1 кодовой информации соответствующие кодовые элементы), то маршрутом его следования являет-gg ся номер нагрузочного экскаватора. Если автосамосвал неиснравлен, то характер неиснравностн индицируется блоком 3 индикацни неисправности, а маршрут его еледования - ремонтная база. Одновременнов65 645 186 4 приемо-декодирующий блок 5, установленный, как и остальные (с 6 по 13) блоки предложенного устройства, на экскаваторе, по линии связи поступает информация о номере автосамосвала, который направлен на погрузку к данному экскаватору. В блоке 6 определения грузоподъемности постоянно хранится информация о грузоподъемности калсдого из контролируемых автосамосвалов в соответствии с его номером. Это позволяет по номеру направленного на логрузку автосамосвала определить его грузоподъемность, т. е.оптимальное значение веса загружаемого материала. При этом на выходе блока 6 о-пределекия грузоподъемности формируется код числового значения грузоподъемности направленного на погрузку автосамосвала. Эта информация индицируется блоком 13 индикации нагрузки и .поступает в блок 10 сравнения, где сравнивается с информацией -о весе погружаемого материала, которая поступает из блока 12 памяти. Формирование информации о весе нагружаемого материала ос}ш.ествляется блоком 8 измерения загрузки ковша, выполненным, капример, в виде датчика мощности приводного двигателя с соответствующей аппаратурой преобразования информации. При наличии на соответствующем входе первого ключа 9 разрешающего сигнала, который формируется ириемо-декодирующим блоком 5 после приема и декодирования номера направленного на погрузку автосамосвала, информация о isece погружаемого материала через первый ключ 9 поступает в блок 12 памяти, где накапливается и храиится до окончания погрузки данного автосамосвала. Блок 13 индикации осуществляет индикацию информации о весе погружаемого материала, накапливаемую блоком 12 памяти. При достижении веса нагружаемого в автосамосвал материала величины его грузоподъемности, блок 10 сравнения вырабатывает сигнал совпадения, который индицируется блоком 13 индикаций, фиксируя окончание погрузки данного автосамосвала и по которому информация из блока 12 памяти поступает через второй ключ 11 в блок 7 передачи информации, после чего в блоке 12 памяти осуществляется сброс накопленной информации и подготовка к приему новой информации, Таким образом введение в устройство блока 8 измерения загрузки ковша и блока 6 определения грузоподъемности, соединенных с другими блоками предложенного устройства, позволяет исключить аппаратуру взвешивания погружаемого материала в кузове каждого автосамосвала и осуществить взвешивание и контроль погрузки непосредственно на погрузочном агрегате (например экскаваторе), количество которых, как правило, на порядок меньше количества погружаемых автосамосвалов,
Это позволит также исключить влияние динамической составляющей нагрузки подающего в автосамосвал материала, что имеет место в известном устройстве. Введение блока 4 распознавания и маршрутизации, соединенного с другим-н блоками предложенного устройства, согласно формулы изобретения, и осуществляющего считывание и передачу информации о номерах всех контролируемых автосамосвалов, независимо от их количества, позволяет исключить радиоаппаратуру формирования и передачи кодовой информации, устанавливаемую на каждом автосамосвале в известном устройстве.
Подключение блока 13 индикации к другим блокам, предложенного устройства позволяет экскаваторщику получать информацию о грузоподъемности погружаемого автосамосвала, весе загружаемого в него материала и регулировать процесс погруз кн.
Формула изобретения
Устройство для контроля и учета загрузки автосамосвалов, содержащее блок контроля технического состояния автосамосвала, подключенный к носителю кодовой информации и блоку индикации неисправности, приемо-декодирующий блок, соединенный с одним из входов первого ключа, блок памяти, выход которого подключен к блоку индикации погрузки и к одному из входов второго ключа, выход которого соединен с блоком цередач1И информации, блок сравнения, выход которого подключен к одному из входов блока памяти, к блоку индикации и к одному Из входов второго
ключа, отличающееся тем,что,с целью упрощения И повышения надежности устройства, в него введены блок определения грузоподъемности, блок распознавания и маршрутизации и блок измерения загрузки ковша, который подключен к другому входу первого ключа, выход которого соединен с другим входом блока памяти, выход которого соединен с одним из входов блока сравнения, блок распознавания и
маршрутизации подключен к входу приемо-декодирующего блока, другой выход которого через блок определения грузоподъемности соединен с другим входом блока сравнения.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР №,498636, кл. G 07С 5/00, 03.10.74.
2.Авторское свидетельство СССР № 341060, кл. G 07С 5/00, 18.08.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство для обработки данных комплекса карьер-обогатительная фабрика | 1975 |
|
SU556451A1 |
| Устройство для контроля погрузки транспортных средств | 1977 |
|
SU708379A1 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОЙ АВТОМАТИЗИРОВАННОЙ ЗАГРУЗКИ ГОРНОЙ МАССЫ В АВТОСАМОСВАЛЫ ПРИ НЕПРЕРЫВНОЙ РАБОТЕ ВЫЕМОЧНОГО АГРЕГАТА И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2595115C1 |
| Устройство для обработки данных комплекса "карьер-обогатительная фабрика" | 1977 |
|
SU670949A1 |
| Устройство для контроля и учета работы карьерного автотранспорта | 1975 |
|
SU516075A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
