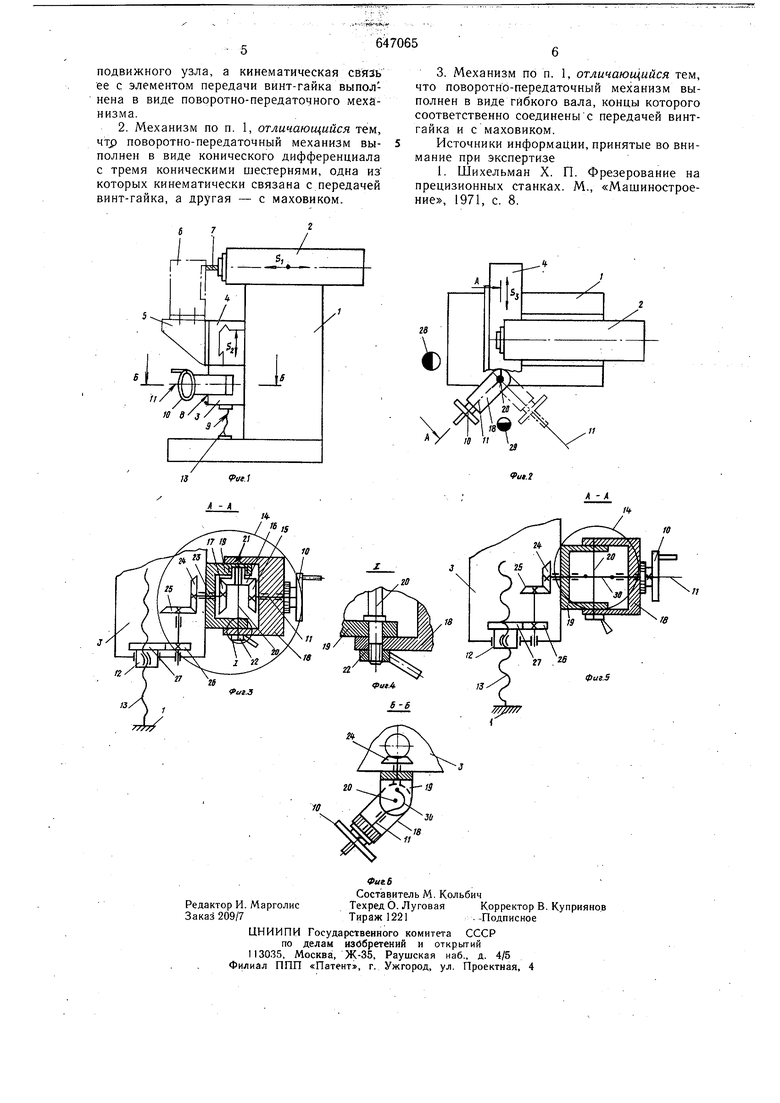
кого вала (разрез А-А фиг. 2); на фиг. 6 - разрез Б-Б фиг. 1. Механизм ручных перемещений устанавливают на станке: Станок содержит станину 1, наверху которой в направляющих смонтирована щпиндельная бабка 2 с возможностью пёр ёмещений, указанных на фиг. 1 стрелкой St. На станине 1 в вертикальных направляющих смонтирован подвижный узел (суппорт) 3 с возможностью его перемещений, указанных стрелкой Si. На направляющих узла 3 установлены салазк 4, которые могут перемещаться в направлениях, показанных на фиг. 2 стрелкой 5з. Салазки несут на .себе стол 5 с обрабатываемым изделием 6. В щпинделе щпиндельной бабки 2 закреплен режущий инструмент 7.-Для перемещений узла 3 в направлениях 5г предусмотрен механизм 8 ручных перемещений относительно щпиндельной бабки 2. Механизм 8 ручных перемещений содержит передачу винт-гайка 9 и маховик 10 с осью II его вращения, кинематически связанной с вращаемым элементом (гайкой) 12 (фиг. 2) передачи винтгайка 9, размещенным в узле 3.(Винт 13 передачи винт-гайка 9 закреплен на станине 1. Кинематическая связь оси 11 вращения маховика 10 с гайкой 12 осуществляется через поворотно-передаточньш механизм 14. В варианте, показанном на фиг. 3, поворотно передаточный механизм 14 содержит конический дифференциал, состоящий из конических .щестерен 15-17. Шестерня 15 установлена на оси 11 вращения маховика 10. Ось 11 вращения маховика 10 смонтирована в noBQpOTHOM кронщтейне 18, который соединен с неподвижным, кронщтейном 19 с помощью оси 20 поворота маховика 10. Один конец оси 20 в точке 21 скреплен с поворотным кронщтейном 18, а на втором конце оси установлена гайка 22. Шестерня 16 конического дифференциала смонтирована с возможностью вращения соосно с осью 20, а щестерня17 установлена на оси 23, смолтированной в неподвижном кронштейне 19 Шестерня 17 через пару конических щестсг рен 24 и 25 и пару цилиндрических щестерен 26, 27 соединена с гайкой 12 передачи винт-гайка 9. На фиг. 2 позицией 28 обозначено место оператора спереди станка, прзицией 29 - сбоку станка, а штрих-пунктирными лидияяи указано второе положение оси 11 вращения маховика 10. На фиг. 5 и 6 показан другой вариант выполнения поворотно-передаточного механизма 14, который содержит гибкий вал 30. Один конец вала соединен с осью 11 вращения маховика 10, а второй-кинематически соединен с гайкой 12 передачи винт-гайка посредством пар щестерен 24, 25 и 26, 27. Механизм работает следующим образом При работе с расположением оператора в позиции 28 (фиг. 2) спереди ста к опёра647065тор устанавливает ось 11 вращения маховика 10 в наиболее удобное для себя положение и поворотом гайки 22 (фиг. 3) фиксирует его положение путем закрепления позоротного кронщтейна 18 на неподвижном кронщтейне 19. Вращением маховика 10 оператор через поворотно-передаточный механизм 14, передачи 24, 25 и 26, 27 передает крутящий момент к гайке 12 передачи винтгайка и тем самым перемещает подвижный узел 3 по винту 13 в направлениях Sa (фиг. 1) до необходимого положения узла 3 на станине 1. При необходимости выполнения работы в положении 29 оператор поворотом гайки 22 освобождает поворотный кронщтейн 18 от неподвижного кронщтейна 19 и поворотом вокруг оси 20 переставляет ось 11 вращения маховика 10 в новое, удобное для себя положение относительно направления подачи узла 3 (например, в положение, показанноещтрих-пунктирными линиями на фиг. 2), после чего затяжкой гайки 22 фиксирует это положение и перемещает суппорт из положения оператора 29 сбоку станка, Возможно также выполнять перемещение суппорта 3 одновременно с поворотом оси вращения 11 вокруг оси поворота 20, т. е.. например, во время перехода оператора из положения 28 в положение 29. Так как во фрезерном станке по предлагаемому изобретению ось вращения маховиka ручных перемещений суппорта относительно щпиндельной бабки выполнена поворотнопереставляемой относительно направления подачи суппорта, а кинематическая связь ее с вращаемым элементом передачи винтгайка выполнена посредством поворотнопередаточного мехднизма. Оператор в зависимости от вида выполняемой операции и от вида обрабатываемой детали может осуществлят ь изменение положения оси вращения маховика перемещений суппорта и устанавливать ось вращения маховика в необходимое, наиболее удобное для себя положение. Это позволяет обрабатывать детали, обработка которых невозможна на известных станках указанного типа, снижает утомляемость оператора и обеспечивает повыщение производительности труда. (По предварительным данным на каждом станке в среднем пр.оизводительность труда увеличивается на 3%). , Формула изобретения 1. Механизм ручного перемещения подвижного узла станка, например фрезерного, включающий маховик с осью, кинематически связанной с поворотным элементом передачи винт-гайка, отличающийся тем, что, с целью повышения удобства обслуживания, ось маховика установлена с возможностью поворота относительно направления перемещения
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1980 |
|
SU867521A1 |
| Шлифовально-доводочный станок | 1976 |
|
SU727404A1 |
| Полуавтоматический токарно-винторезный станок для нарезания замкнутых винтовых нарезок правого и левого направлений | 1959 |
|
SU128724A1 |
| Устройство для глубокого сверления | 1986 |
|
SU1421470A1 |
| Станок для обработки секторов сварных отводов трубопроводов | 1978 |
|
SU764872A1 |
| Бесцентровый станок для наружного круглого шлифования | 1957 |
|
SU112654A1 |
| Станок многошпиндельный сверлильно-пазовальный для выборки пазов и отверстий в ножках стула | 1982 |
|
SU1055646A1 |
| КОПИРОВАЛЬНО-РАСТОЧНОЙ СТАНОК | 1973 |
|
SU382477A1 |
| Станок для обработки валов | 1982 |
|
SU1036473A1 |
| Станок для обработки концов труб | 1983 |
|
SU1106600A1 |
