I
Изобретение относится к обработке металлов давлением, в частности, к устройствам для механизированной резки листового проката, и может быть использовано .ля приема отрезанных листов и передачи их на дальнейшую обработку. Целесообразно использование его в заготовительных цехах заводов металлоконструкции, в строительном, транспортном, химическом машиностроении, в судостроении.
Известен манипулятор к гильотинным ножницам, включаюш,ий поворотные в горизонтальной плоскости .платформы, установленные на дугообразные рельсы 1.
Однако такой манипулятор нуждается в большой производственной плош,ади, занимаемой траекторией, перемешения платформы.
Известен манипулятор к гильотинным ножницам, содержаш.ий приемный стол, установленный на поворотной в горизонтальной плоскости консоли. Опора консоли закреплена на станине гильотинных ножниц, механизм подъема приемного стола расположен по оси опоры консоли 2.
Такое расположение .механизма подъема ведет к увеличению мош.ности его привода.
поскольку привод должен, кроме силы тяжести изделий и стола, преодолевать большие силы трения скольжения, возникаюш,ие при консольной нагрузке. В манипуляторе отсутствует механизм наклона приемного стола, следовательно, операции по разгрузке деталей с приемного стола в тару производятся вручную.
Известны механизмы подъема приемных столов, состояш,ие из двух пар рычагов, связанных общим шарниром 3.
Рычаги оснаш,ены роликами, перемеш,ающи1мися в направляющих подъемного стола и нижней платформы. Поворот рычагов осуществляется силовым цилиндром. Такие, механизмы осуществляют только подъем стола, сохраняя его горизонтальность.
5
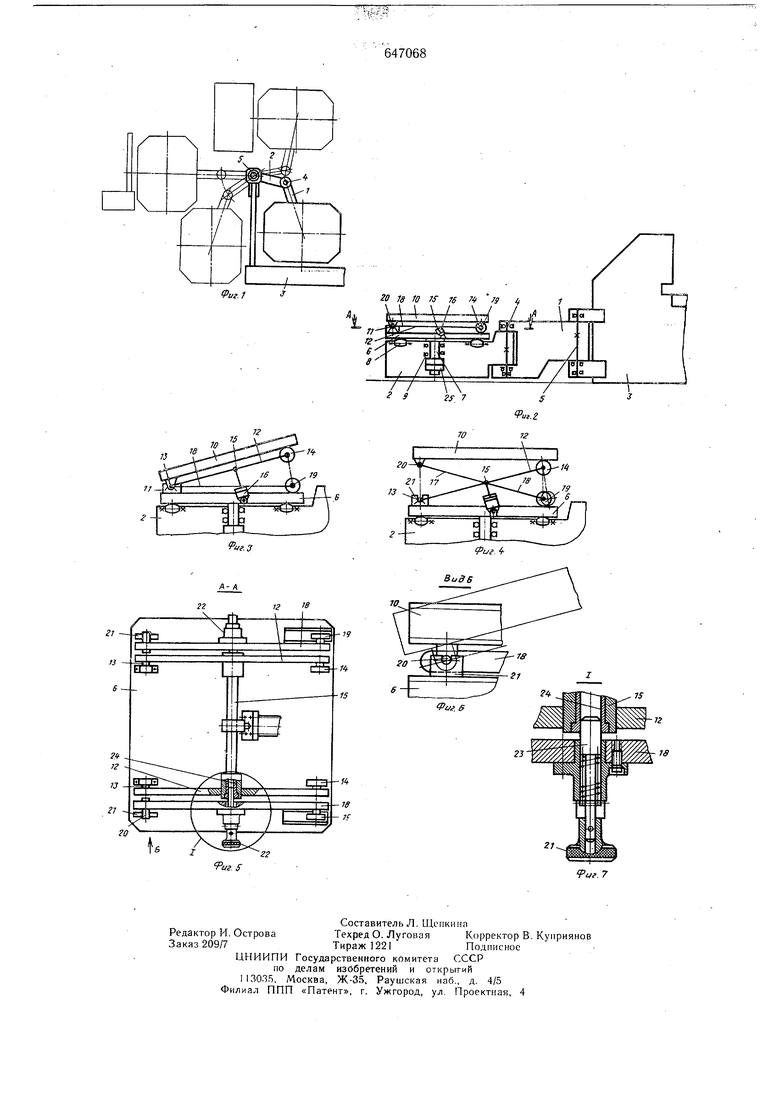
Известен манипулятор к гильотинным ножницам, содержащий консольные опоры, установленные с возможностью поворота относительно вертикальных осей и щарнирно связанные между собой и со станиной нож0ниц, платформу, смонтированную на одной из опор с возможностью поворота вокруг вертикальной оси и несущую стол, расположенный с возможностью поворота вокруг горизонтальной оси с помощью приводаИ. Наличие привода большой мощности для подъема консольных опор с платформой и столом приводит к тому, что привод подъема, кроме силы тяжести стола с заготовками, должен преодолевать силу тяжести консольных опор, платформу и силы трения скольжения, возникающие в опоре при консольной нагрузке. Цель изобретения - обеспечение подъема стола приводом малой мощности. Для этого стол снабжен узлом подъема в виде рычагов, одни концы которых шарнирно связаны соответственно со столом и платформой, а их противоположные концы взаимодействуют с ними с помощью роликов, а также фиксатором для соединения середины рычагов между собой и с приводом. На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 - то же, вид сбоку (приемный стол показан в нижнем положении); на фиг. 3 - то же, вид сбоку (приемный стол показан в наклонном положении); на фиг. 4 - то же, вид сбоку (приемный стол показан в поднятом положении); на фиг. 5 - разрез по А-А на фиг. 2; на фиг. 6 - вид по стрелке Б на фиг. 5; на фиг. 7 - узел I на фиг. 5. Манипулятор содержит консольные опоры 1 и 2, шарнирно связанные между собой и со станиной 3 ножниц и установленные с возможностью поворота относительно вертикальных осей 4, 5. На опоре 2 установлена платформа 6 с возможностью поворота вокруг вертикальной оси 7. Платформа 6 лежит на роликах 8, закрепленных на опоре 2, ось 7 платформы 6 находится в направляющей качения 9. На платформе 6 установлен стол 10, снабженный узлами поворота 11, который состоит из параллельных рычагов 12, закрепленных с помощью горизонтальной оси 13 на платформе 6 и несущих на свободных концах ролики 14. Рычаги 12 связаны между собой осью 15, соединенной с силовым цилиндром 16. Стол 10 снабжен также узлом 17 подъема, выполненным в виде параллельных рычагов 18 со смонтированными на их свобод ных концах роликами 19, диаметр которых равен диаметру роликов 14, связанных с помощью шарниров 20 со столом 10. Длина рычагов 18 равна длине рычагов 12. Нри нижнем и наклонном положениях стола 10 шарниры 20 находятся в вертикальных открытых пазах опор 21, закрепленных на платформе 6. На каждом из рычагов. 18 установлен фиксатор 22 с пальцем 23. На торцах оси 15 выполнены отверстия 24, диаметр которых равен диаметру пальцев 23. При нижнем положении приемнрго стола 10 оси отверстий 24 и пальцев 23 совпадают. Рабочая среда к силовому цилиндру 16 подается через полую-ось 7 при помощи гидромуфты 25.. л ,.„,,, Манипулятор работает следующим образом. Поворотом опор 1 вокруг своих осей манипулятор подводится к необходимым рабочим позициям (между стенками ножниц на загрузку деталями, в позицию установленной тары - на разгрузку, к столу данных или смежных ножниц - для последующей резки). В позиции загрузки стол 10 находится в нижнем положении. При этом рычаги 12 и 18 находятся в горизонтальном положении, а шарниры 20 - в пазах опор 21. В позиции разгрузки деталей в тару силовой цилиндр 16 с помощью рычагов 12 и роликов 14 наклоняет стол 10 вокруг оси 13. Рычаги 12 занимают наклонное положение, рычаги 18 остаются в горизонтальном положении. Шарниры 20 при этом находятся в пазах опор 21, а пальцы 23 фиксаторов 22 находятся во втянутом положении. При необходимости подъема стола 10 пальцы 21 вводятся в отверстия 24, соединяя середийЫ рычагов 12 и 18 и силовой цилиндр 16. Поднимая рычаги 12 и 18, поднимают тем самым стол 10, сохраняя его горизонтальность, при этом ролики 14 прокатываются по направляющим стола 10, а ролики 19 - по направляющим платформы 6. Шарниры 20 вертикально поднимаются и выходят из пазов опор 21. При опускании стола шарниры 20 вновь входят в открытые пазы опор 21, пальцы 23 при необходимости вытягиваются из отверстий 24 и в таком положении фиксируются. Формула изобретения Манипулятор к гильотинным ножницам, содержащий консольные опоры, установленные с возможностью поворота относительно вертикальных осей и шарнирно связанные между собой и со станиной ножниц, и платформу, смонтированную на одной из опор с возможностью поворота относительно вертикальной оси и несущую стол, расположенный с возможностью поворота вокруг горизонтальной оси с помощью привода, отличающийся тем, что, с целью уменьшения потребляемой мощности, стол снабжен узлом подъема в виде рычагов, одни концы которых шарнирно связаны соответственно с платформой и горизонтальной осью, а их противоположные концы взаимодействуют со столом и платформой с помощью роликов, а также фиксатором для соединения середины рычагов между собой и с приводом. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство № 243552, кл. В 23 D 33/02, 1968. 2.Авторское свидетельство № 349501, кл. В 23 D 33/02, 1970. 3.Лившиц Я. Н., Пинсон И. И. Средства механизации при резке металла на гильотине М., «Судостроение, 1964, с. 45. 4.Авторское свидетельство № 420413, кл. В 23 D 33/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР К ГИЛЬОТИННЫМ НОЖНИЦАМО у О (-\irfiK^r\rr^'-< \ ПД ui«L<ttL< ^ '.'i>& ! | 1971 |
|
SU420413A1 |
| Манипулятор к гильотинным ножницам | 1978 |
|
SU770687A1 |
| Агрегат для резки листового проката | 1982 |
|
SU1046043A1 |
| Установка для резки листового материала | 1986 |
|
SU1369876A1 |
| ЛИНИЯ ДЛЯ ЛИТЬЯ ПОД НИЗКИМ ДАВЛЕНИЕМ, УСТАНОВКА ДЛЯ ЛИТЬЯ ПОД НИЗКИМ ДАВЛЕНИЕМ И МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ОТЛИВОК | 2001 |
|
RU2205090C2 |
| Ножницы для резки листового материала | 1987 |
|
SU1581477A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Устройство для перемещения листов | 1974 |
|
SU662284A1 |
| Устройство для резки листового материала | 1982 |
|
SU1134309A1 |