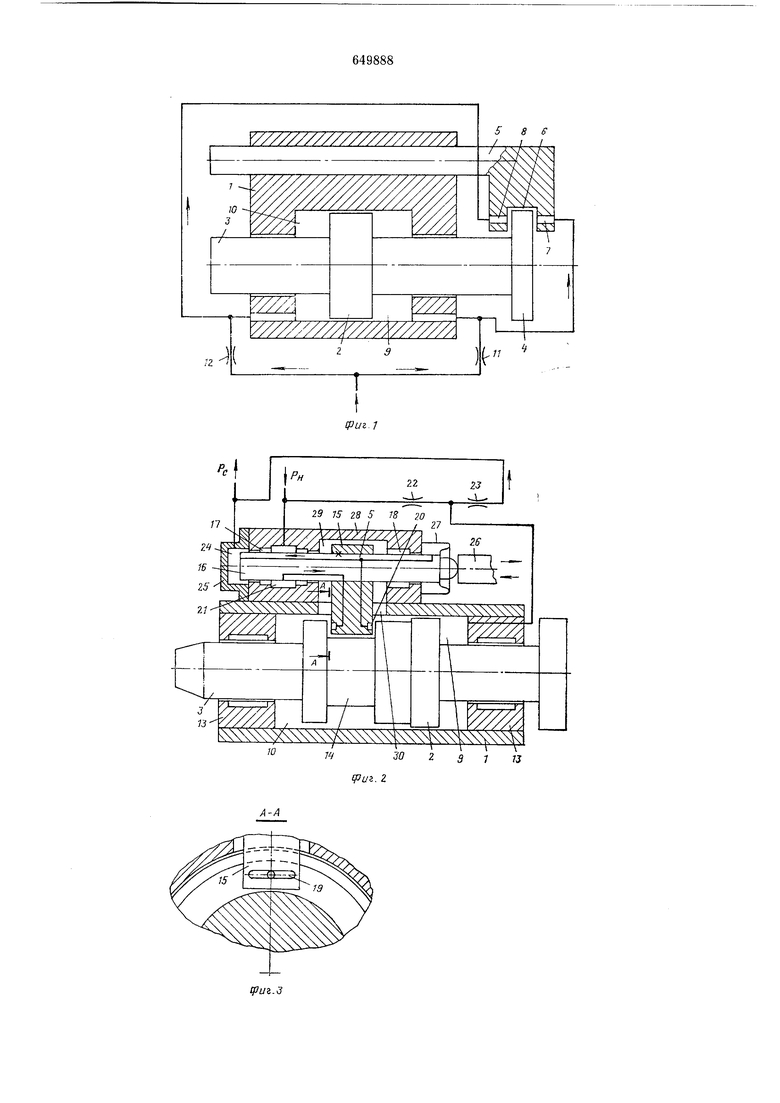
менными дросселями в обеих полостях гидроциливдра; на фиг. 5 - сервопривод с направляющей, расположенной в поршне гидропривода; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - сервопривод, направляющая которого расположена под углом.
В сервоприводе (фиг. 1) гидроцилиндр / содержит исполнительное звено в виде порщня 2 со щтоком 3. На штоке 3 установлен диск 4.
В корпусе гвдроцилиндра 1 расположена направляющая 5 с прорезью 6, в которую с зазором входит диск 4. На сопряженных с торцами диска 4 иоверхпостях прорези 6 выполнепы сопла 7 и 8, соединенные соответственно гибкими шлангами (на чертеже не показаны) с полостями 9 и 10 гидроцилиндра. Эти сопла, поверхпостп торца диска 4 и прорези 6 образуют переменные дроссели типа сопло - заслонка гидроусилителя. Нолости 9 и 10 гидроцилиндра соответственно через постоянные сопротивления // и 12 соединены с источником давления.
Таким образом, заслонками переменных дросселей являются торцы диска 4, жестко связанного с поршнем 2, а сопла 7 н 8 выполнены подвижными и установлены на наиравляющей 5. (Четыре указанных сопротивления образуют основую схему).
Сервоиривод работает следующим об разом.
Нод давлением жидкость течет по тракту: сопротивлепие //, полость 9 и сопло 7 и параллельно по тракту: сопротивление 12, полость W и сопло 8. При отсутствии нагрузки па шток 3 и неподвижной направляющей 5 шток 3 сам находит такое положение относительно направляющей 5, что мостовая схема находится в равновесии, т. е. RT - , где R - значение соответствующего индексу сопротивления.
Нри смещении штока 3 относительно направляющей 5, например под загрузкой или из-за смещения направляющей 5, изменяются зазоры между диском 4 и прорезью 6 и нарушается равновесие мостовой схемы.
Например, при смещении направляющей 5 направо увеличивается (уменьшается) зазор сопла 7 (8), при этом соответственно уменьшается (увеличивается) сопротивление R-7 (Rs) и давление в полости 9 (10).
Разность этих давлений смещает шток 5 направо до восстановления пового положения равновесия. Таким образом, шток 5 в следящем режиме перемещается за подвижной направляющей 5. Если на шток 5 действует нагрузка Р (например, вправо), то шток смещается относительно направляющей 5 вправо. При этом увеличивается (уменьшается) зазор сопла 8 (7), уменьшаются (увеличиваются) соответственно сопротивление и давление в полости 10 (9). Разность этих давлепий уравновешивает нагрузку.
Такой сервопривод позволяет, перемещая паправляющую 5, управлять положением штока 3 независимо от того, вращается он или находится в покое.
Сервопривод, показанный на фиг. 2 и 3, также содержит гидроциливдр /, поршень 2, шток 3. Шток 3 расположен в гидростатических подшипниках 13. Часть поршня в полости 10 выполнена обннженной по диаметру и в ней выполнена прорезь 14, в которую входит с зазором сухарь 15, установленный на скалке 16, подвижной в направляющей 5, со ступенчатыми гидростатическими иодшипниками 17 и 18. Выполненные на торцах сухаря 15 карманы образуют сопла 19, 20 переменных дросселей. Сопло 19 через коллектор 21 в
подшипнике 17 соединено с источником давления Р„, а сопло 20 через сверления в скалке 16 - со сливом. Эти сопла с торцами прорези 14 образуют переменные дроссели. Другая полость 9 цилиндра соединена с источником давления через сопротивление 22 и со сливом через соиротивлепие 23.
Левый конец скалки выходит в сливную полость 24, образованную колпаком
25, а правый копец упирается в шток 26 гтривода скалки 16 и имеет герметичное гибкое уплотнение 27 в виде сильфона, полость которого через скалку 16 соединена со сливом.
Корпус 28 подшипников скалки 16 герметичио состыкован с корпусом 3 цилиндра. Полость 29 корпуса 28 через прорезь 30 соединена с полостью 10. Через прорезь 30 в полость 10 проходит и сухарь 15.
Сервопривод работает следующим образом.
Под давлением жидкость течет по тракту элементов 21-19-10-20-24 и тракту элементов 22-9-23. При этом давление
t),, в коллекторе 21 питает подшипник 17, давление полостей Ю и 29 питает подшипник 18. Давление в полости 24 прижимает скалку 16 к штоку 26 привода скалки 16. Сильфоннное уплотнение удерживает скалку 16 от ироворота. Шток 3 и скалка 16 отделены от своих опор слоем жидкости.
При смещении штока 26 вправо (влево) скалка 16 смещается вправо (влево).
При этом зазор сопла J9 увеличивается (уменьшается), а зазор сопла 20 уменьшается (увеличивается). Сле|довательно уменьшается (увеличивается) сопротивление сопла 19, увеличивается (уменьшается)
сопротивление сопла 20 и увеличивается (падает) давление в полости 10 по сравнению с давлением в полости 9, и поршень 2 со штоком 3 смещается в следящем режиме за скалкой 16 под действием разности давлений в полостях 9 и 10.
Такой привод позволяет управлять неподвижным или вращающимся поршнем 2 с высокой точностью, поскольку чувствительные сопротивления сопла зависят от зазоров в третьей степени, компактный, не требует гибких шлангов между полостями и сопротивлениями.
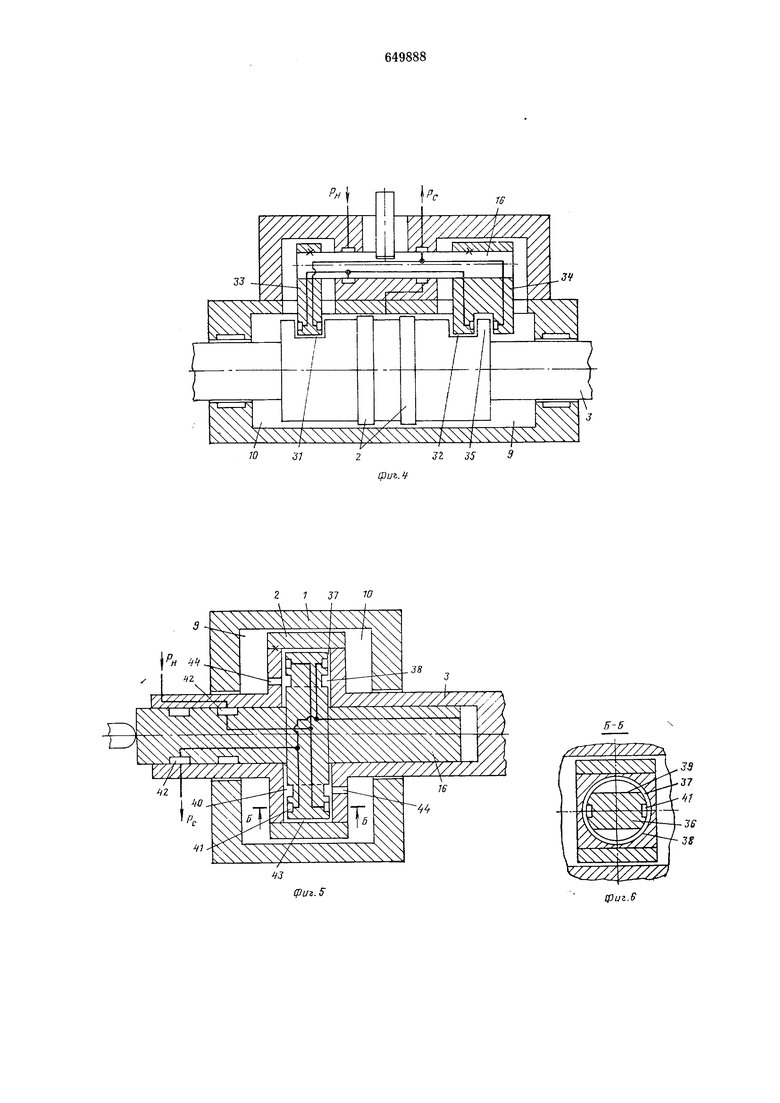
На фиг. 4 показан сервопривод, все четыре сопротивления мостовой схемы которого выполнены чувствительными и расположены в обеих полостях 9 и 10 гидроцилиндра. Поршень невращающийся, поэтому прорези 31 и 32 иекольцевые. Сухарь 33 выполнен обхватываемыми торцами ирорези 31, а сухарь 34 обхватывает выступ
35на поршне. Образованные сопряженными с зазором торцами сухарей и поршня переменные дроссели типа сопло - заслонка соединены с источником давления и сливом по мостовой схеме так, что изменения всех сопротивлений при действии нагрузки или смешении скалки направлены на сохранение условия равновесия. Сервопривод обладает повышенными чувствительностью и жесткостью. Он может быть выполнен и для вращающегося поршня. При этом прорези 31 и 32 должны быть кольцевыми.
Сервопривод, показанный на фиг. 5 и 6, также имеет гидроцилиндр /, поршень 2, шток 3 и корпус. Подвижная скалка 16 расположена в направляющей не на гидроцилиндре, а в штоке 3. В отверстии скалкп 16 закреплен штырь 36, расположенный с зазором 37 в отверстии 3S поршня. На копирах штыря срезаны лыски 39, выполнены кольцевые канавки 40 и каналы 41 сопл. Сопла соединены сверлениями в штыре 35, скалке 16, штоке 3 и коллекторами 42 между скалкой 16 и штоком 5 и с источником давления и сливом по мостовой схеме. Переменные дроссели сопло - заслонка образованы зазорами 37 между штырем
36и отверстием 38. Глухие полости 43 поконцам штырей каналами 44 соединены с полостями 9 и 10 цилиндра.
При смеш,ении скалки 16 относительно поршня 3 сопротивления поршневых дросселей изменяются так, что вызывают изменения давлений в полостях 9 и 10 цилиндра, направленные на устранение относительного смещения скалки 16 и штока 5. Такой сервопривод - компактный и жесткий, его можно использовать для управления вращающимся и невращающимся поршнем.
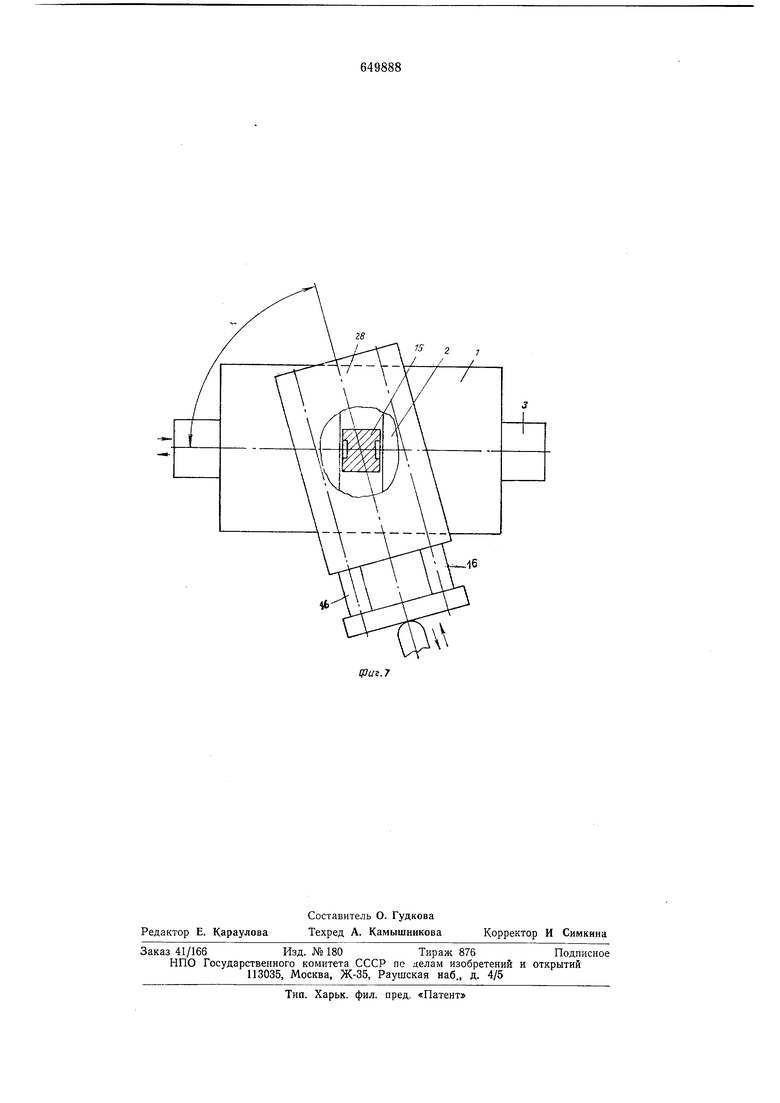
На фиг. 7 показан сервопривод, в котором направляющая подвижного элементл выполнена на корпусе гидропривода и расположены под углом а к оси гидроцилиндра.
Направляющая образована двумя скалками 16, что удерживает подвижиый элемент от поворота вокруг оси направляющей. Переменные дроссели образованы, как в варианте сервопривода, изображенного на фиг. 2 и 3, зазорами между торцами паза на поршне 2 и сухаря 15. В зависимости от угла перемещение поршня 2 со штоком 3 будет меньше перемещения подвижного элемента на скалках 16. Этот вариант сервопривода исполнения позволяет существенно редуцировать перемещение
исполнительного звена двигателя по сравнению с исходным перемещением подвижного элемента, что расширяет возможность сервопривода.
Таким образом, иредлол енный сервопрпвод имеет более простую, компактную и расширенную область применения, в частности позволяет точно и жестко управлять осевым положением вращающихся шппиделей, выполненных в виде поршня. Можег
быть выполнен не только линейный, но и ротативный двигатель.
Формула изобретения
1. Гидравлический сервопривод, содержащий гидроцилиидр с поршнем и гидроусилитель с переменными дросселями типа сопло - заслонка, причем сопла подключены к полостям гидроцилиндра, о т л ичающийся тем, что, с целью упрощения и расшпрения области применения ги1дравлического сервопривода, в нем заслонки переменных дросселей жестко связаны с поршнем гидроцилиндра, а сопла
выполнены подвижными и установлены на направляющих.
2. Гидравлический сервопривод по п. I, отличающийся тем, что заслонки размещены в полостях гидроцилиндра.
3. Гидравлический сервопривод по п. I п 2, отличающийся тем, что сопла размещены в поршне гидроцилиндра.
4. Гидравлический сервопривод по п. 1 и 2, от л и ч а ю щ II и с я тем, что направляющие установлены под острым углом к оси гидроцилиндра.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 330265, кл. F 15 С 3/10, 1971.
2. Башта Т. М. Г адропривод и гидропневмоавтоматика. М., « Машиностроение, 1972, с. 173.
У//////////////////////Л
iz
See / , л Л.
ю
Нда 2 5 7 J
ffuz. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод | 1979 |
|
SU922338A1 |
| Шпиндельный узел | 1979 |
|
SU872186A1 |
| Привод подач | 1986 |
|
SU1395451A1 |
| Ползун | 1974 |
|
SU476130A1 |
| Стенд для испытания амортизаторов | 1977 |
|
SU691721A1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
| Двигатель внутреннего сгорания с турбонаддувом | 1985 |
|
SU1281708A1 |
| Система управления регулируемой гидромашиной | 1983 |
|
SU1183718A1 |
| Устройство для разделения прутковогоМАТЕРиАлА HA зАгОТОВКи | 1978 |
|
SU841804A1 |
| Электрогидравлический следящий привод | 1989 |
|
SU1754918A1 |
(Риг. 5
5-Б
Spuz.S
