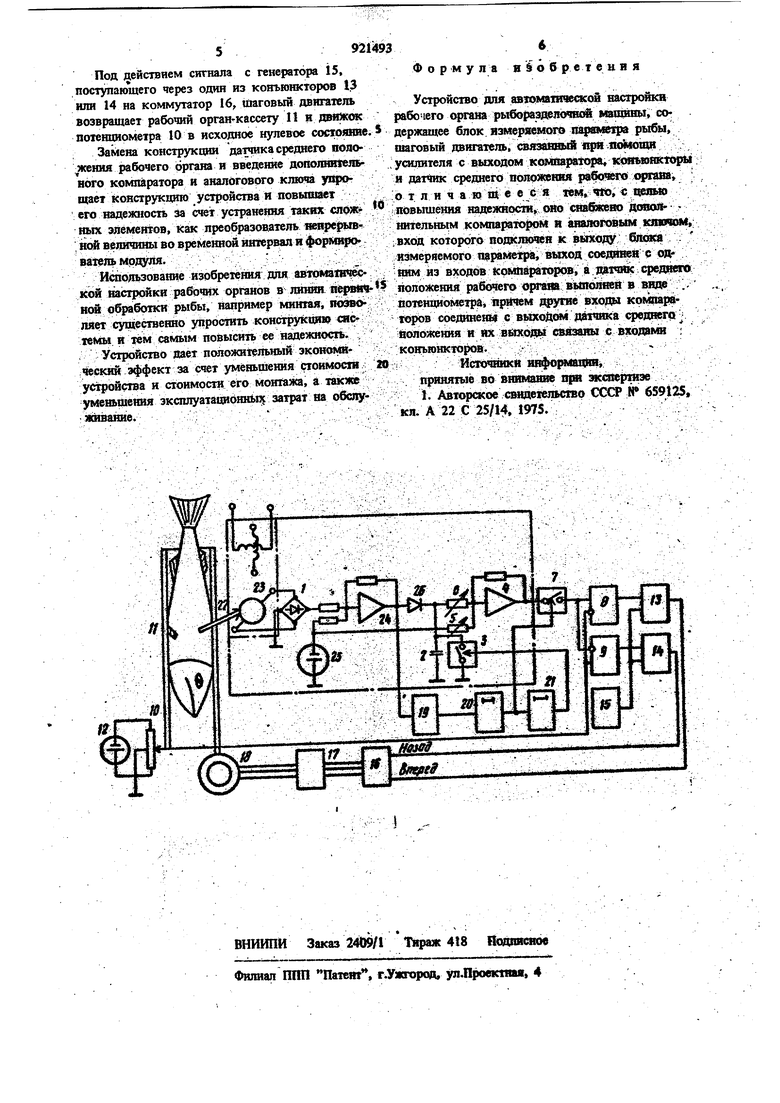
Изобретение относится к обработке рыбы ,и может быть использовано в рыборазделочных машинах для автоматического обезглавливаюш рыб различных видов. Известно устройство для автоматической; настройки рабочего орагана рыборазделочной машины, содержащее блок измеряемого нараметра рыбы, шаговый двигатель, связанный посредством усилителя с выходом компаратора конъюнкторы, компъюторы, датчик среднего положения рабочего органа, выполненный в виде двух конечных вьшлючатслей, формирователь модуля и преобрабователь непрерьшной величины во временной интервал 1. Недостатками известного, устройства являкйс его сложность из-за «аличия ,,большого числа элементов и небольшая надежность. Цель изобретения - повышение надежности устройства. Указанная цель достигается тем, что устройство для автоматической настройки рабочего органа рыборазделочной маншны, содер5(сащее блок измеряемого параметра рыбы, шаговый двигатель, связанный посредством усилителя с выходом компаратора, конъюнкторы и датчик среднего положения рабочего органа снабжено дополнительным компаратором и аналоговым ключом, вход которого подключен к выходу блока измеряемого параметра, выход соединен с одним из входов компараторов, а датчик среднего положения рабочего органа выполнен в виде потенциометра, причем другие входы компараторов соединены с выхо)0(ом датчика среднего положения и их выходы связаны со входами конъюнкторов. . На чертеже представлена функциональная схема устройства. Устройство для автоматической настройки рабочего органа рыборазделочной машины содержит блок намеряемого параметра рыбы, который состоит из формирователя максимального сигнала, состоящего из диода 1, конденс атора 2, и ключа 3 сброса, и сз мматора 4 с регулируемыми входами (сопротивления 5 и 6), на выходе которого установлен аналоговый ключ 7, соединяющий его выход с первыми входами компараторов 8 и 9, вторые входы которых подключены к потенциометру 10. При таком включении компараторов их выходные сигналы будут нулевыкга при равенстве сигналов с блока измеряемого пар аметра рыбы и потенциометра 10. Едигшчный сигнал будет на выходе компаратора 8 и нулевой - на выходе компаратора 9, если сигнал с блока измеряемого параметра будет превышать сигнал с потенциометра 10. При изменении ситуации с выходными сигналами блока измеряемого параметра и потенциометра 10 меняется состошие выходных сигналов компараторов (на выходе компаратора 9 будет единищый сигнал, на выходе компа ратора 8 - нулевой) . Движок потенциометра 10 мехаш1Черки ; связан с рабочим органом 11 (подвижной кассетой),.в его крайние вывода .тгодклвдчени К источюпсу 12 напряжения. Посредством конъюнкторов 13 и 14 сигналы с генератора 15 в зави симости от состояния компараторов 8 и 9 пода ются на входы назад - вперед KOMMjrraTO pa 16 и далее через усилитель 17 уа шаговый двигатель 18, который механически связан с, кассетой. С помощью нуль-органа; 19 и элементов 20 и 21 задержки формируются комаидь управления. Блок измеряемого параметра рыбь содержит также измерительный рычаг 22, свяэанньШ с чувствительным злементом 23 (коси- / яусным преобразователем угла в электрический сигнал), сигнал с которого поступает на сумматор 24, входы которого подключены к ИСТОЧшису 25 эталонного шпряжекия и через вьщрямнтель 26 - к выходу чувствительного злемента 23...- ,;. ; ; ;. :л,: -: - . Устройство работает следующим образом, . Подлежащая обезглавливанию рыба укладьша ется в кассету с фиксацией ее головы в упорну планку, усхановле1шую так, чтобы среднесташчео .каярыба в последующем не вызывала перем§ц ння рабочего органа. При перемещении,рыбы тра1к;порти|зуюидам органом (не показан) , последняя отклоняет , рычаг 22 и поворачивает на некоторый зтол чувствителып.1й элемент 23. G помощью упора вьмрямителя этот сигнал выпрямляется и сравнивается посредством сумматора 24 с эталонным сигналом от истошика 25. В результате на выходе сумматора 24 форяшруется аналоговый сипшл, пропорционалышй хекущей толщине рыбьь В процессе движения рыбы сигнал достигает Своего максимального значения и затем начинает спадать. Конденсатором 2, подключенным посредством вьшрями ля 26 к выходу сумматора 24, запомннается максимальное значение сигнала. С помощью сумматора 4 формируется сигшш, пропорцЕЮ1гальнь1й отклонению длины голо вы обрабатьшаемой рыбы 41 от средней. Формирование сигнала Л1 производится согласно уравнению Л1 a(B-B.f), де а - постоянный коэффициент, зависящий от вида рыбы; В - текущее значение толщины обрабатьгоаемой рыбы; BC среднее значение толщины обрабатываемых рыб. Сопротивлениями 6 и 5 , соответственно устанавливаются необходимью Для обрабатьшз - : емого вида величина а и Вс.р . Из уравнёмия следует, что сигкал на выходе сумматора 4 меняется не только до величине, HQ н по знаку и может быть нулевьпя (при обработке средней рыбы), положительным по знаку, если обрабатываем рыба превышает .(феднюю. отрицательным, если обрабатываемая рыба мёньще средней.. В момент появления сигнала на выходе С)лмматора 24 срабать 1вает нуль-ippraH 19, запуская в работу элементы 20 и 21 задержки. С поязленнем сигнала На выходе элемента 20 задержки (время задержки соогветствует времени измерения максикш}ьной топщинЬ максимального экземпляра, рыбы), включается аналотойый клю 7 н вькодной сигнал сумматора 4 йодается на компараторы 8 И 9. В зависимости от знака сигнала-cf сумматора срабатьгоае тот или иной компаратор 8 юш 9, обеспечивая подачу импульса с генератора 15 через .соогвет-ствующий конъюнктор 13 или 14 на входа вперед или HaaajDi коммутатора 16 щагового двигателя 18.; ИГаговый двигатель перемеща ет кассеты 11 и одновременно перемещает , явйжок потенциометра 10... :. . .- - : / . . Окгнал С вь1хода потенциометра 10 в завн симосхи от направлёшш его перемещения также меняется по аелинине и яо знаку.. Причем его полярность совпадает по полярности с сИгшлом на выходе ключа 7. В рез5гльше неремещенш кассеть наступает т&кой , сигналы, пое}}щаюа№е на разные входы компаратород 8 к 9, ср нивают(:я .и подаЧа;им П у} сов генератора 15 через коньюикторы 13-или 14: прекращается.: Происхддипг отработка сигнала и кассета 11 с рь1бой перемещается на требуемое расстояние. В дальнёйщем производится экономичный реэ головы. После е|грзаверщения появляется сигнал kat ъШопе элемента 21 задержки, который сбрасывает сигнал с кондеисатора 2 и прекращается подача управляющего сигЬала на .ключ 7 , который размьйкается. Одновременно под действием вьвсодного сигнала с потенциометра 10 происходит обрагоое срабатывание компараторов 8 и , и результате чего меняется состояние их выходов. 592 Под действием сигнала с генератора 15, поступаюшего через один из коныошсторов 13 или 14 на коммутатор 16, Шаговый двигатета возвращает рабочий органгкассету П и движок потешшометра 10 в исходное нулевое состояние Замена конструкции датчика среднего подо жения рабочего органа и введение дополншеяьного компаратора и аналогового клкта тает конструкцию устройства и повышает его надежность за счет устранения таких сложг 11ых элементов, как преобразователь непрерыв ной величины во временной шпервал я формиро ватель модуля. Использование изобретения для авто«а1нчёсков настройки рабочих органов в линия первм кой обработки рыбы, например минтая, позволяет существенно упростить конструкцта сяс темы и тем самым повысить ее надежность. . Устройство aiaeT положительный зкономяческий эффект за счет уменьщешя стоимосга устройства и стоимости его монтажа, а также уменьщепия зксплуатаоионныз затрат на обслуживание. Форму л а я § о б ре т с н я я Устройство для авгомапгае4ясой настройки р&боюго (фгана рыбо{ азделдчн(Й мешшны, содержащее блок, измеряемого параметре рыбы, шаговый двигатель, связовяий 1фя лоЬющи усилителя с выходом компаратора копюнкторы и датчик среднего положения рабочего орпт отличающееся тем, т, с ццяыо повышения надежности, оно снабжево дояоя - нительным компаратором и аналоговым юпоосм, вход которого подключен к выходу блока . измеряемого параметра, выход соединея с onним из входов Компараторов, а дапяк средаего положения рабочего выполней в вяде потешшометра пр11чем даугяе входы компараторов соединены с выходом датчика qpemterct аоложення я ИХ выхош 1 связаны с входами ко1п юнкторов. Источники Я11ФО1ЯШЦ1Ш, принятые во вшпшвою п|п экса1еря1зе 1. Авторское сшщехелыаво ССС № 659125, кл. А 22 С 25/14, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU556769A1 |
tf
