1
Изобретение относится к системам коррекции устройств, механические рабочие органы которых имеют упругие связи с основанием и могут совершать нежелательные вынужденные механические колебания под действием вибрационных воздействий.
Изобретение может быть использовано, например, в делительных машинах для нарезания дифракционных решеток с целью коррекции вынужденных колебаний кареток.
Известен способ, по которому коррекцию колебаний каретки делительной машины осушествляют преобразованием колебаний каретки в ряд гармонических компонентов электрического синусоидального сигнала, их суммированием, изменением фазы результирующего сигнала на 180°, измерением разности фаз между коррекционным и исходным вибрационными колебаниями каретки на различных частотах и осуществлением в соответствии с ним корректирующего воздействия на каретку 1.
Недостаток этого способа заключается в том, что при выходе частотной зоны возмущающих воздействий за пределы диапазона эффективной коррекции, краевые колебания этой зоны усиливаются системой коррекции и переходят в автоколебания каретки.
Целью изобретения является получение эффективности коррекции в любом диапазоне частот.
Поставленная цель достигается тем, что
диапазон частот колебаний разделяют на
участки, в каждом из которых величина
разности фаз изменяется на 90°, выделяют
участки, для которых разность фаз имеет
значение в пределах ± 90° и изменяют фаЗУ колебаний этих участков на угол
6 - 90 (1-1} - arc sin - ,
К
где К - коэффициент усиления коррекЦии;
/ - номер участка.
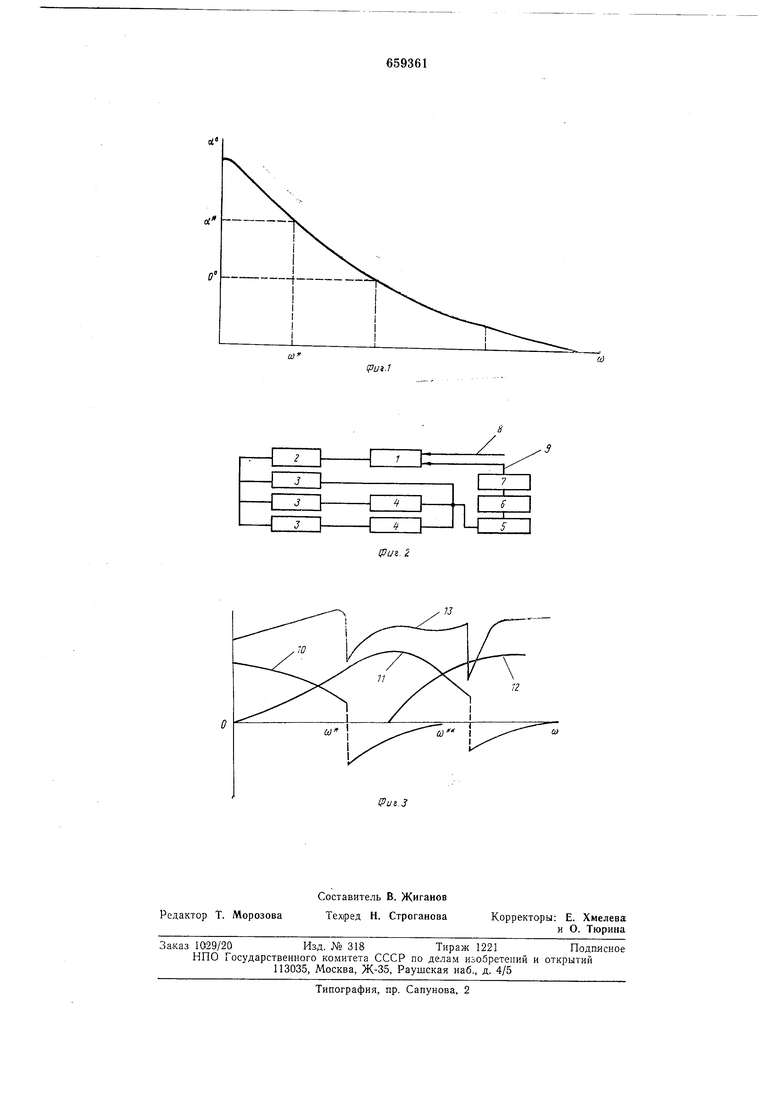
На фиг. 1 представлен график зависимости величины разности фаз а от частоты со колебаний каретки; на фиг. 2 - структурная схема системы коррекции, реализующей способ; на фиг. 3 - кривые, определяющие изменение эффективности коррекции. Система коррекции состоит из объекта регулирования каретки 1, делительной мащины датчика 2, измеряющего величину перемещения каретки 1, полосовых фильтров 3, подключенных параллельно к выходу датчика 2, причем каждый из фильтров пропускает колебания в определенном диапазоне частот, фазовращателей 4, связанных с выходом соответствующего фильтра, усилителя 5, к выходу которого подключены все параллельные каналы системы коррекции, инвертора б, изменяющего фазу электрических колебаний на 180°, и корректирующего устройства 7, связанного с объектом. Каретка 1 подвергается возмущающим 8 и корректирующим 9 воздействиям. Кривые 10, И, 12 определяют изменение эффективности для первого и последующих каналов системы. Кривая 13 определяет ход суммарной кривой эффективности коррекции. Устройство работает следующим образом. Механические колебания каретки нреобразуют в гармонические компоненты электрического сигнала соответствующих частот, суммируют, производят изменение фазы электрического сигнала на 180° и измеряют зависимость разности фаз ее от частоты колебаний каретки. Для этого размыкают цепь системы коррекции, например, на участке усилитель 5 - инвертор 6. Подают синусоидальный сигнал от генератора звуковых колебаний одновременно на вход инвертора и на один из выходов фазометра. Снимают соответствующий сигнал, прошедший по цепи элементов системы коррекции, с выхода усилителя 5 и подают его на второй вход фазометра. Изменяя частоту, получают значения разности фаз в интересующем диапазоне частот. Строят график зависимости величины разности фаз а от частоты ю колебаний. Используя нолученный график, разделяют диапазон частот колебаний объекта на участки, в каждом из которых величина разности фаз а изменяется на 90°: для первого 180°-90°; для второго 90°-0°; для третьего 0°-(-90°) и т. п. Число каналов соответствует числу участков в частотном дианазоне коррекции. Регулируют фильтр 3 каждого канала на преимущественное пропускание электрических колебаний соответствующего частотного участка. Определяют участки, для которых величина разности фаз имеет значение в пределах-90° a -f90°(1) (из трех участков, рассмотренных выше, такими являются второй и третий). Регулируют фазовращатели 4 каналов, соответствующие выделенным по вышеуказанному признаку участкам так, чтобы фаза колебаний в каждом канале была повернута на угол 90°(/-l)-arcsin- ,(2) где К - коэффициент усиления коррекции; / -номер участка. Суммируют колебания различных каналов за счет подключения их к общему входу усилителя 5. Коррекция колебаний нроисходит следующим образом. Если исходное вибрационное воздействие 8 на каретку 1 представить выражением ,(3) воздействие 9 можно то корректирующее записать: лГк - 6sm(W -j- я), где а - амплитуда вибрационного воздействия;b - амплитуда корректирующего воздействия. Если система коррекции является пропорциональным регулятором, то b K.Q (в случае отключенного от каретки корректирующего устройства), где Э - разность фаз между регулирующим и исходным возмущающим воздействиями на каретку. К - коэффициент усиления коррекции, который является, как и разность фаз а, одной из основных характеристик системы коррекции. При подключении коррекционного устройства к каретке 1 на него будет действовать результирующее воздействие (),(5) являющееся суммой исходного возмущающего и корректирующего воздействия. Здесь Э - разность фаз между регулирующим и исходным возмущающим воздействиями на каретку; г - амплитуда результирующего воздействия. Очевидно, в этом случае система коррекции реагирует на амплитуду результирующего воздействия, т. е. , а разность фаз а отсчитывается от его фазы (). В результате корректирующее воздействие оказывается смещенным относительно исходного возмущающего 8 на угол .(6) С учетом этого приравниваем воздействия (3), (4) и (5), получаем г sin (со/+ Q) a зтш( -(- Arsin(cu/ + р) /(Kry-}-a-2aKrcos-f X .,./,,, Afrsinioi ,г XsmU + arctg------ . (7) а +Кг cos 9 Сравнивая начальное и конечное выражения в уравнении (5), находим г У(КгУ + а+2а г cos АГг sin If в arc tg а -ь/Cr coscp Из уравнения (8) найдем отношение , характеризующее степень уменьшения возмущающего воздействия 8 на каретку 1 при подключении к ней системы коррекции: -./Ccojc |/l /Csin i /С - 1 Поскольку в данном случае независимым параметром является не ф, а а, найдем п в зависимости от а. Решив уравнение (6) и (9), получаем 9 - а-fare sin (ЛГ-г-sin я).(11) Наконец, решая совместно уравнения (10) и (И), находим исходное выражение n f(a) ) Д:2 2ЛС08а+ 1 Из уравнения (10) видно, что при (коррекция имеет место только в этом случае), полученное решение будет справедливо при условии, что подкоренное выражение в первой части этого уравнения больше или равно нулю, т. е. .(13) Находим отсюда граничное значение функции , cos ф, при которых отношение (10) еше выполняется sin Тгр ± ± УК- 1 COScprp- Подставляя з1пфгр и созфгр в (10) полу Р - V /ССЛ Уравнивая значения п, полученные из (12) и (15), находим о-. ±( sin- V (16) А у Отсюда следует, что если в каждом из каналов будут отсутствовать колебания с разностью фаз а, меньшей по абсолютной величине, чем определяемая выражением (16), то коррекция колебаний будет эффективной. Действительно, допустим, что эффективность коррекции первого канала (кривая 10) при некоторой частоте со становится отрицательной, т. е. система коррекции усиливает исходное вибрационное колебание, а не ослабляет его. Тем не менее, при наличии соответствующих дополнительных каналов автоколебания на частоте ш не возникнут, поскольку при этой частоте эффективность второго канала (кривая И) имеет большее (причем положительное) значение. Аналогичный эффект будет иметь место при суммировании эффективностей второго и третьего каналов (кривые И и 12) на частоте ю и т. д. Последние каналы системы коррекции могут иметь достаточно малый коэффициент К. усиления и в силу этого не создавать автоколебаний. Таким образом, во всей области частот, где на каретку воздействуют возмущающие воздействия, эффективность коррекции будет положительной. Формула изобретения Способ коррекции механических колебаний каретки делительной машины путем преобразования этих колебаний в ряд гармонических компонент электрического синусоидального сигнала, их суммирования, изменения фазы результирующего сигнала на 180°, измерения разности фаз между коррекционным и исходным вибрационными колебаниями каретки на различных частотах и осушествления в соответствии с результирующим сигналом корректирующих воздействий, отличающийся тем, что, с целью эффективности коррекции в любом диапазоне частот, диапазон частот колебаний разделяют на участки, в каждом из которых величина разности фаз изменяется на 90°, выделяют участки, для которых разность фаз имеет значение в пределах ±90° и изменяют фазу колебаний этих участков на угол (|.-90° (/-)-arc sin - , где К - коэффициент усиления коррекции;/ - номер участка. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 452471, кл. В 23Q 17/02, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции вибрационных колебаний движущейся каретки | 1975 |
|
SU554996A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2007 |
|
RU2337314C1 |
| Способ уменьшения колебаний виброизолированного объекта с сухим трением в подвеске | 1972 |
|
SU442328A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2582201C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Вибродатчик вязкости | 1978 |
|
SU775667A1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
IPui.S
