Изобретение относится к горной промьошленности, в частности к шагающим механизмам передвижения шнекобуровых машин.
Известен механизм шагания шнекобуровой машины, включанвдий н.есущую раму, гидростойки, гидроцилиндры лыж, выполненные в виде багчмаков Ll.
Недостатком механизма является то, что лыжи, представляя собой цельную конструкцию значительной длины (. 12-18 м и более , не приспособлены к неровностям рельефа рабочей площадки, по которой перемещается оборудование. Вследствие этого лыжи выполнены достаточно массивными для выдерживания изгибающих нагрузок при неровной почве.
.Более близким техническим решением к изобретению по технической сущности и дocтигaeмo /Iy результату является механизм шагания шнекобуровой машины, включающий раму с опорной базой, .гидростойки, гидроцилиндры лыж, каждая из которых выполнена в виде башмаков, соосно связанных между собой посредством стяжки с осевы1чи шарнирами, размещенными на противоположных концах последней 2J.
Однако при низких температурах воздуха недостаточно надежной является работа устройства при перетекании рабочей жидкости в гидроцилиндрах под действием усилий на гидростойках (при размещении машины на уклоне. Кроме того, .использование в качестве стяжки между башмаками шарнирной цепи в виде ригелей
10 и планок приводит к снижению рабочей скорости передвижения машины и не исключает возможности поломки цепи при посадке машины на опорную базу.
Цель изобретения - повышение надеж
15 ности работы механизма на наклонном рельефе и скорости передвижения машины.
Эта цель достигается тем, что в механизме шагания шнекобуровой ма20шины, вк.точакядем раму с опорной базой, гидростойки, гидроцилиндры лыж, каждая из которых выполнена в виде двух башмаков, соосно связанных между собой посредством стяжки с осевыми
25 шарнирами, размещенными на противоположных концах последней, стяжка .выполнена в виде прямолинейной направляющей с ползуном.
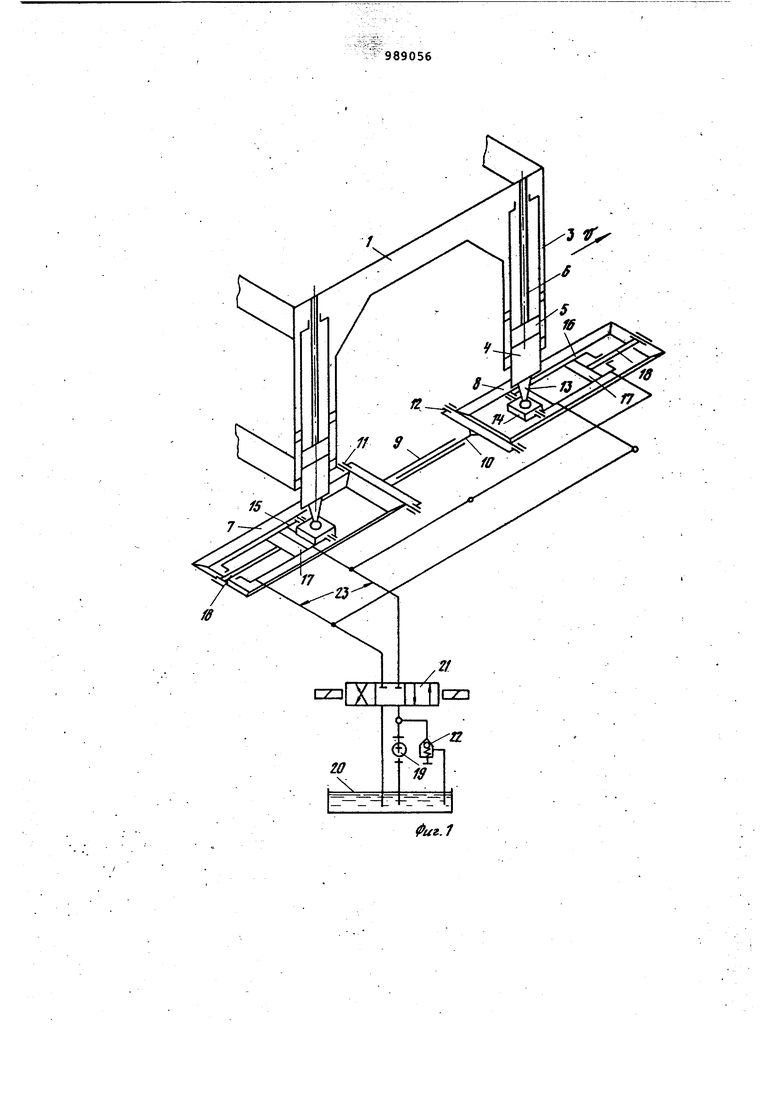
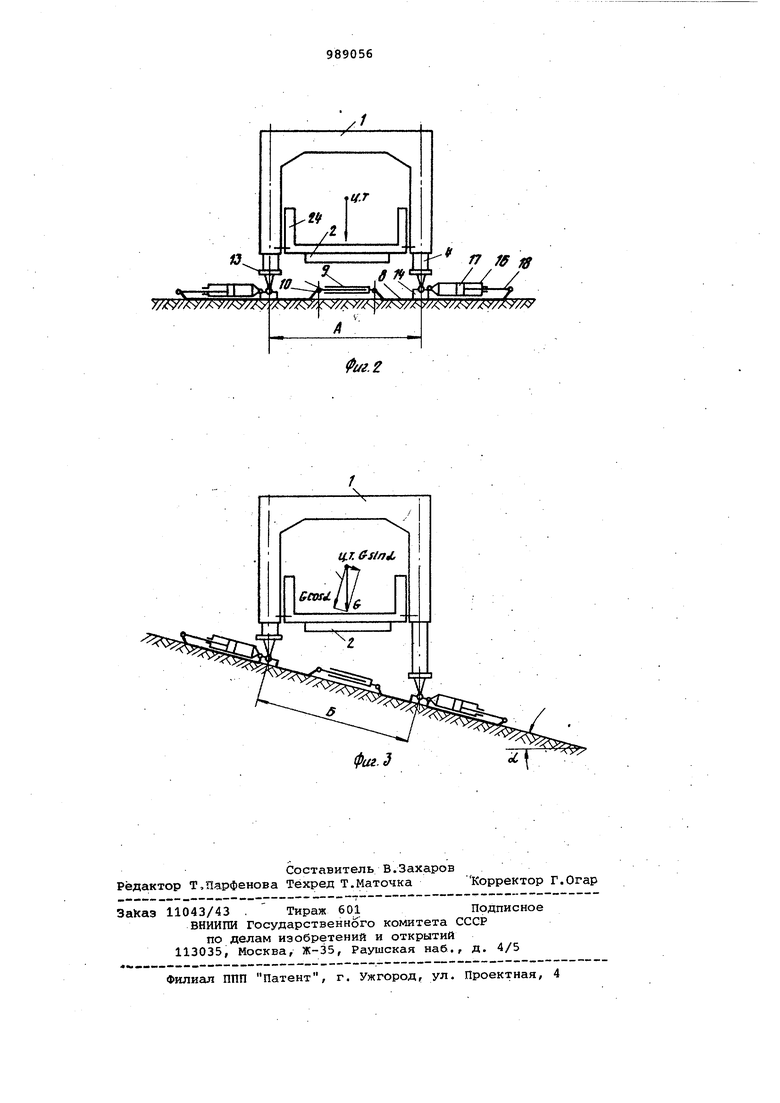
На фиг. 1 показан механизм шага30ния машины в аксонометрической проек- ции;на фиг. 2 - шнекобуровая машина с расположением механизма шагания на горизонтальной площадке; на фиг. то же, для наклонного рельефа рабочей пло111адки. Механизм шагания включает раму 1 (фиг. 1 ) с опорной базой 2 (фиг. и 3 ), гидростойки 3, внутри которых установлены цилиндры 4 с поршнями и .штоками б, жестко скрепленными своими концами с рамой 1. Лыжи выполнены из двух башмаков 7 и 8, шар нирйо связанных друг с другом. Межд башмаками 7 и 8 соосно, им установле стяжка в виде прямолинейной направляющей 9 ( Например, отрезок цилиндр с ползуном 10, выполненным, наприме в виде штока, свободно размещенного ( с небольшим радиальным зазором) в направляющей цилиндре) 9. Противоположные концы направляющей 9 и пол зуна 10 соединены.с башмаками, соот вётственно, осевыми шарнирами 11 и 12. Каждый цилиндр 4 посредством ша нирной пяты 13 опирается на ползун 14, установленный в направляющих (не показаны башмаков 7 и 8. Ци.линдры 15 и 16 шарнирно соединены с ползунами 14, а поршни 17 через Штоки 18 - с башмаками 7 и 8. Механизм шагания работает от. маслонасоса 19, подключенного к емкости 20. В гидросистеме предусмотрены электрозолотник 21, предохранительный клапан 22 и маслопроводы 23. Машина снабжена буровой платформой 24 фиг. на которой размещают рабочее оборудо вание (.буровой став, приводы и т.п Механизм шагания работает следую щим образом. Рама 1 спускается на свою опорную базу 2, башмаки 7 и 8 подтягиваются вверх гидростойками 3 до момента снятия с них силы тяжести .рамы 1. В таком разгруженном положении башмаки 7 и 8 штоками 6 цилиндров 15 и 16. перемещаются в крайнее положение в сторону необходимого перемещения машины. Затем гидростойками 3 башмаки 7 и 8 опускаются на рабочую пло щадку До тех пор,.пока вся сила тяжести рамы и рабочего оборудования не буде.т перенесена на них, база приподнимается и путем втягивания одного из поршней 17 со штоком 18 в цилиндр 16 (или 15 и вытягивания др угого поршня со штоком из цилиндра 15 ползуны 14 (и опирающиеся на них рама с рабочим обору до в а; ни ем) перемещаются в соответствующую сторону 1по стрелке V на фиг. 1). Наличие осевых шарниров 11 и 12 обеспечивает жесткость лыж в горизонтальной плоскости, а наличие прямолинейной направляющей 9 с ползуном 10 исключает возможность складывания этих элементов в гармошку, так как башмаки прижимаются к рабо-. чей площадке силой тяжести машины. При перемещении машины данным механизмом шагания по наклонной площадке с углом oi, (фиг. 3) расстояние между башмаками 7 и 8 увеличивается от величины А (фиг. 2) до величины . В (фиг. 3) и это увеличение компенсируется свободным перемещением ползуна 10 в направляющей 9, что исключает возможность появления на стойках дополнительных изгибающих моментов. При использовании предлагаемого изобретения повьшается скорость передвижения машины вследствие исключения операции ориентирования башмаков лыжи относительно друг друга при расположении машины на уклоне, сокращаются затраты вспомогательного времени на бурение. Формула изобретения Механизм шагания шнекобуровой машины, включающий раму с опорной базой, гидростойки, гидроцилиндры лыж, каждая из которых выполнена в виде двух башмаков, соосно Связанных между собой посредством стяжки с осевыми шарнирами, размещёнными на противоположных концах последней отличающийся тем, что, с целью повышения надежности работы механизма На наклонном рельефе и скорости передвижения машины, стяжка выполнена в виде прямолинейной направляющей с ползуном. Источники информации, принятые во внимание при экспертизе1.Авторское свидетельство СССР № 614216, кл. Е 21 С 1/00, 1976. 2.Авторское свидетельство СССР №.448281, кл. Е 21 С 1/00, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1973 |
|
SU448281A1 |
| Шагающий механизм | 1978 |
|
SU713967A1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Рабочий орган шнекобуровой машины | 1980 |
|
SU949169A1 |
| Рабочий орган одношпиндельной шнекобуровой машины | 1977 |
|
SU699165A1 |
| МЕХАНИЗМ ХОДА ШНЕКОБУРОВОЙ МАШИНЫ | 1972 |
|
SU350955A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Механизм шагания экскаватора | 1982 |
|
SU1086087A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829820A1 |