13
ких окружностях. Нижние узлы крепления ГЦ 9-12 расположены в точках пересечения осевых линий, проведенных в горизонтальной плоскости симметрии нижней секции и внешней концентричес- кой окружности. Одноименные полости ГЦ 9-12 соединены между собой гидромагистральными линиями 13 с запорными механизмами 14. В процессе угловых перемещений нижней секции базы проИзобретение относится к горнотранспортным машинам и может быть использовано в ходовых механизмах шагающего типа, работающих на уклонах.
Цель изобретения - упрощение конструкции и повышение надежности.
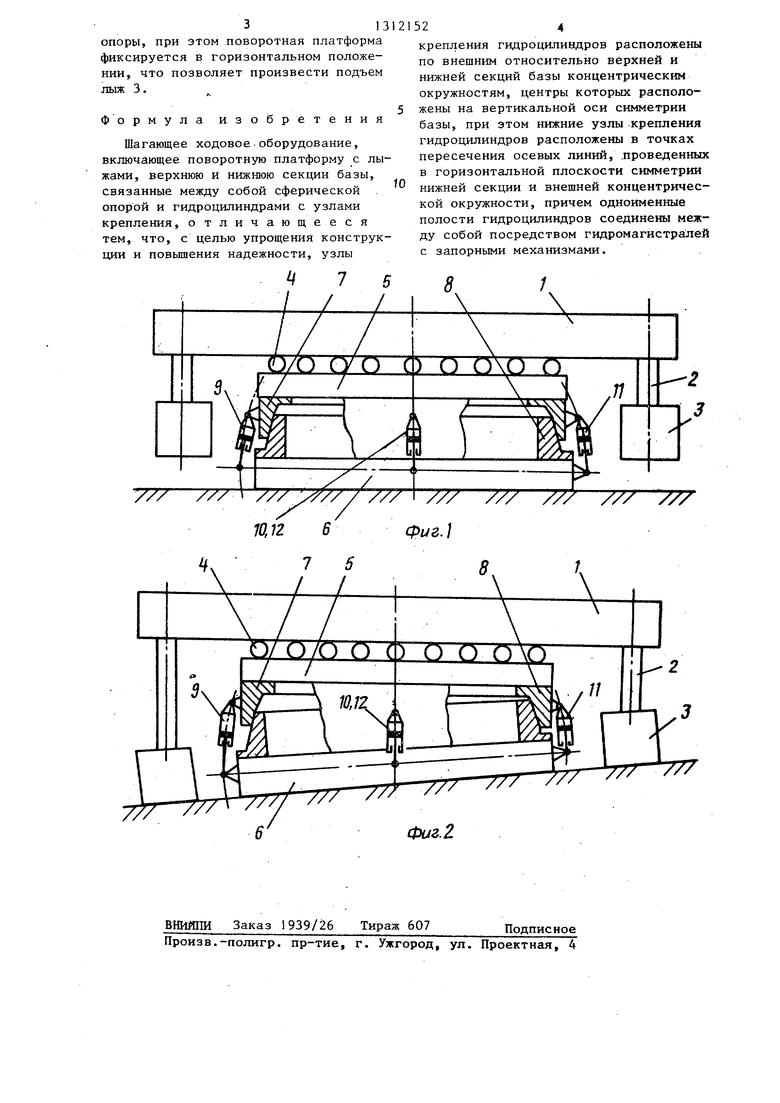
На фиг. I изображено оборудование при расположении на горизонтальной поверхности; на фиг. 2 - то же, на наклонной поверхности; на фиг. 3 - гидравлическая схема оборудования.
Шагающее ходовое оборудование содержит поворотную платформу 1, соединенную посредством гидродомкратов 2 с лыжами 3, установленную через опорно-поворотное устройство 4 на базе, состоящей из верхней 5 и нижней 6 секций, между которыми помещена сферическая опора, выполненная в виде верхнего несущего элемента 7 с внутренней сферической поверхностью и нижнего несущего элемента 8 с наружной шаровой поверхностью. Верхняя 5 и нижняя 6 секции базы связаны между со.бой гидроцилиндрами 9-12, узлы крепления которых расположены на внешних концентрических окружностях, при этом нижние узлы крепления гидроцилиндров 9-12 совмещены с узлами пересечения осевых линий горизонтальной плоскости симметрии сферической опоры с внешними концентрическими окружностями. Одноименные (штоковые и бес- штоковые) полости гидроцилиндров 9-12 соединены между собой гидромагистральными линиями 13, снабженными запорными механизмами I4.
Устройство работает следующим образом.
152
исходит свободное перераспределение объемов рабочей жидкости в одноименных полостях ГЦ 9-12. Узлы их крепления всегда располагаются во взаимно перпендикулярных плоскостях по линиям внешних концентрических окружностей. Это позволяет обеспечить устойчивость ГЦ 9-12, т.к. нагрузки и сдвигающие усилия воспринимаются несущими элементами сферической опоры. 3 ил.
Основное рабочее положение машины соответствует опиранию на базу при поднятых лыжах 3 и закрытых запорных механизмах 14, что исключает подвиж- кость сферической опоры и обеспечивает устойчивое положение машины. Для перешагивания машины с помощью гидродомкратов 2 производится опускание лыж 3 и последующий подъем поворотной платформы 1 вместе с базой над опорной поверхностью основания. Перед установкой машины для работы на продольных и поперечных уклонах открываются запорные механизмы 14, благодаря чему создается подвижность сферической опоры.
При опускании поворотной платформы 1 Плоскость нижней секции 6 базы за счет угловых перемещений совмещается с опорной поверхностью основания. В процессе угловых перемещений нижней секции 6 базы происходит свободное перераспределение объемов рабочей жидкости в одноименных полостях гидроцилиндров 9-12, причем узлы их крепления всегда располагаются во взаимно перпендикулярных плоскостях по линиям внешних концентрических окружностей. -Это позволяет обеспечить устойчивость гидроцилиндров 9-12, так как внецентренная передача нагрузок осуществляется в вертикальных плоскостях и возникающие при этом сдвигающие усилия воспринимаются не- элементами 7 и 8 сферической опоры.
После установки машины на базу- закрываются запорные устройства 14, исключающие подвижность сферической
313
опоры, при этом поворотная платформа фиксируется в горизонтальном положении, что позволяет произвести подъем льш 3.
Формула изобретения
Шагающее ходовое.оборудование, включающее поворотную платформу с лыжами, верхнюю и нижнюю секции базы, связанные между собой сферической опорой и гидроцилиндрами с узлами крепления, отличающееся тем, что, с целью упрощения конструкции и повьпления надежности, узлы
524
крепления гидроцилиндров расположены по внешним относительно верхней и нижней секций базы концентрическим окружностям, центры которых расположены на вертикальной оси симметрии базы, при этом нижние узлы .крепления гидроцилиндров расположены в точках пересечения осевых линий, .проведенных в горизонтальной плоскости симметрии нижней секции и внешней концентрической окружности, причем одноименные полости гидроцилиндров соединены между собой посредством гидромагистралей с запорными механизмами.
Фиг.2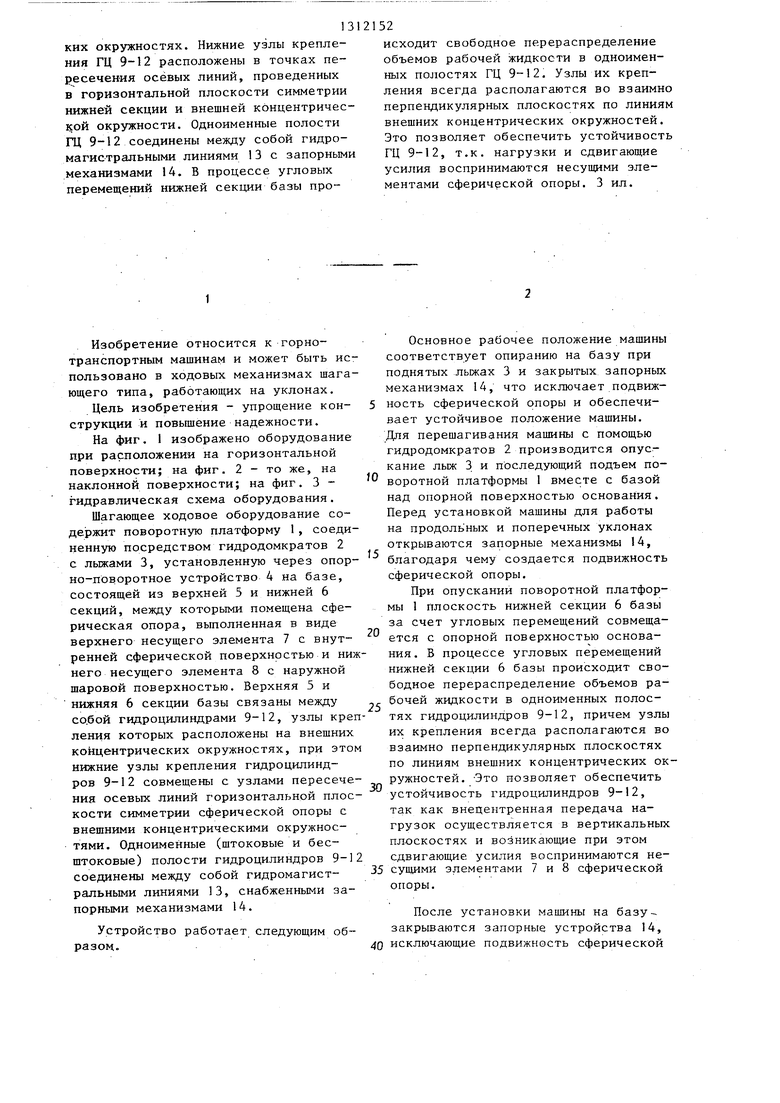
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее ходовое оборудование | 1973 |
|
SU702129A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Опорное устройство горнотранспортной машины | 1982 |
|
SU1137164A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Ходовой механизм шагающего типа | 1976 |
|
SU692949A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ НАЛИПАНИЯ И НАМЕРЗАНИЯ ГОРНОЙ МАССЫ К ДНИЩУ ОПОРНОЙ БАЗЫ И ЛЫЖАМ ШАГАЮЩЕГО ЭКСКАВАТОРА | 2023 |
|
RU2809383C1 |
| Шагающая опора | 1973 |
|
SU488745A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1330338A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
Изобретение относится к горнотранспортным машинам и м.б. использовано в ходовых механизмах шагающего типа,, работающих на уклонах. Цель - упрощение конструкции и повьшение надежности шагающего ходового оборудования. Оно включает поворотную платформу, установленную через опорно- поворотное устройство на базе, выполненной из верхней и нижней секций. Секции связаны между собой гидроцилиндрами . (ГЦ) 9-I2, центры которых расположены на вертикальной оси симметрии базы. Узлы крепления ГЦ 9-12 расположены на внешних концентричесс (9 .13 Щ СЛ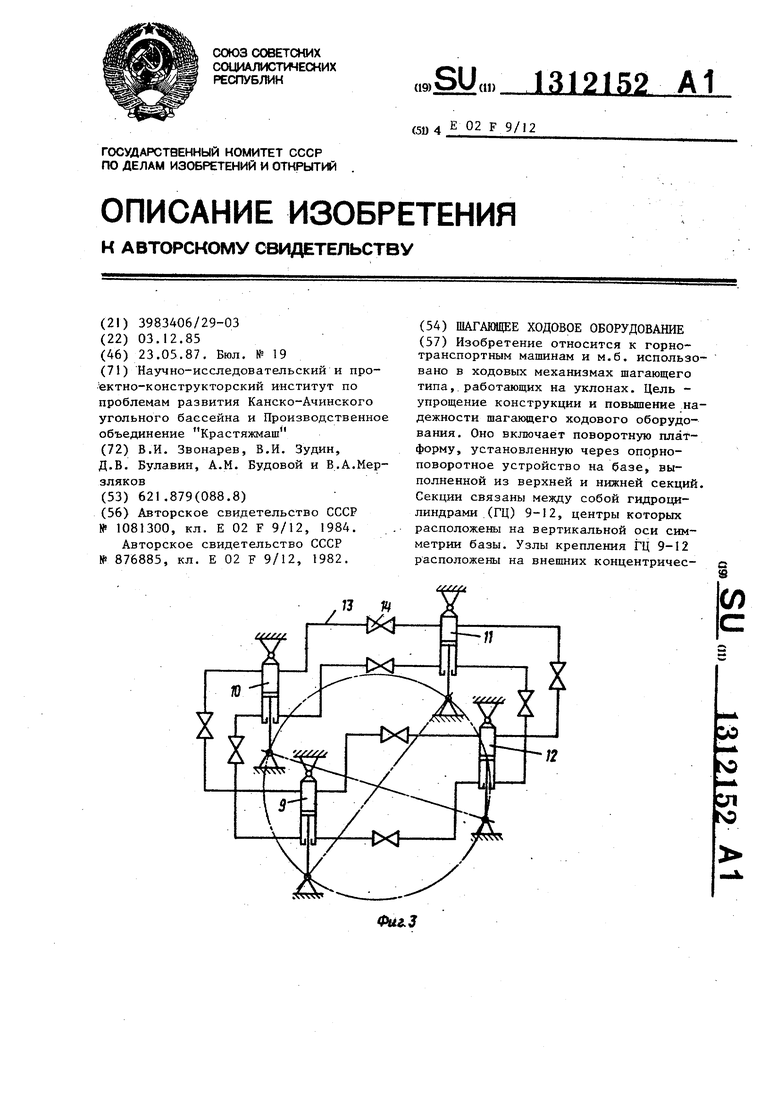
| Шагающее ходовое оборудование | 1983 |
|
SU1081300A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экскаватор | 1980 |
|
SU876885A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
