Изобретение относится к области судостроения, в частности, к устройствам для дистанционного управления спасательными средствами.
Известны устройства для дистанционного управления шлюпочной лебедкой со спасательных средств при спуске их на воду, содержащие барабан, кинематически соединенный со шлюпочной лебедкой, груз в подвеске, связанный с барабаном управляющим тросом, толкатель, взаимодействующий с рычагом тормоза, ролик, установленный на толкателе и огибаемый управляющим тросом, и тормоз 1.
Однако эти устройства сложны по конструкции, ненадежны и неудобны в эксплуатации.
Целью изобретения является повышение надежности устройства и удобства в эксплуатации.
Это достигается тем, что ролик, огибаемый управляющим тросом, установлен на управляющем рычаге тормоза между тормозом и противовесом, а груз в подвеске снабжен роликом, в который запасован трос, закрепленный на спасательном средстве.
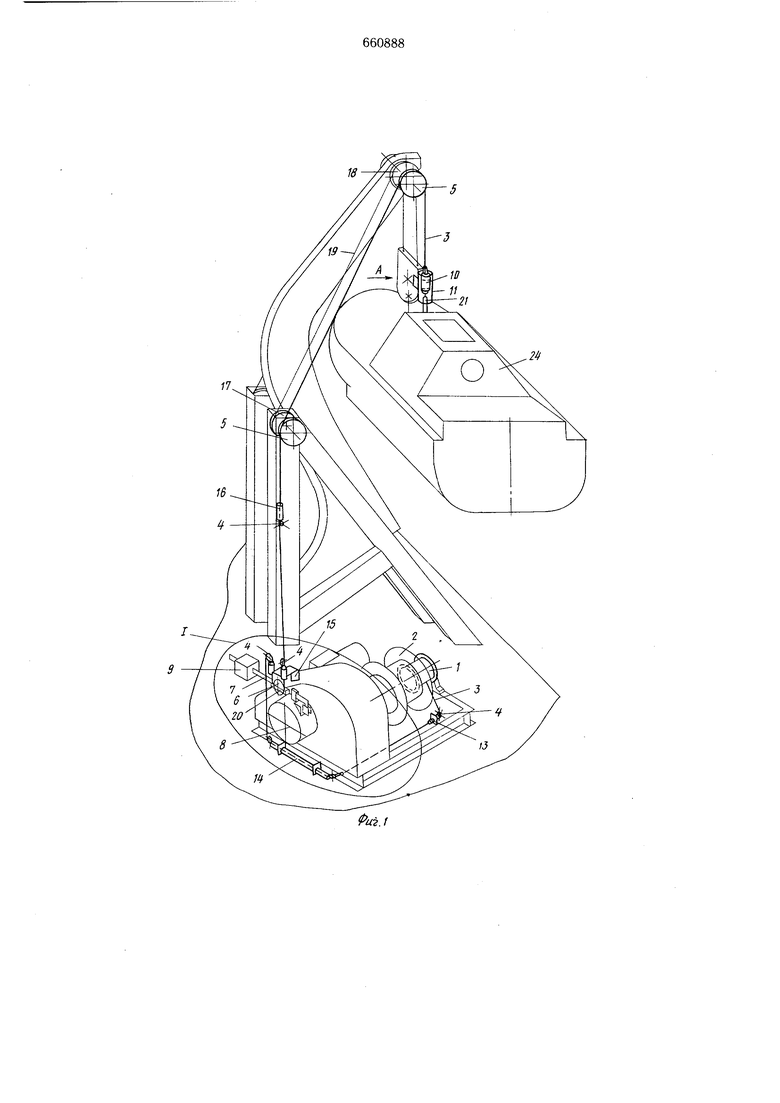
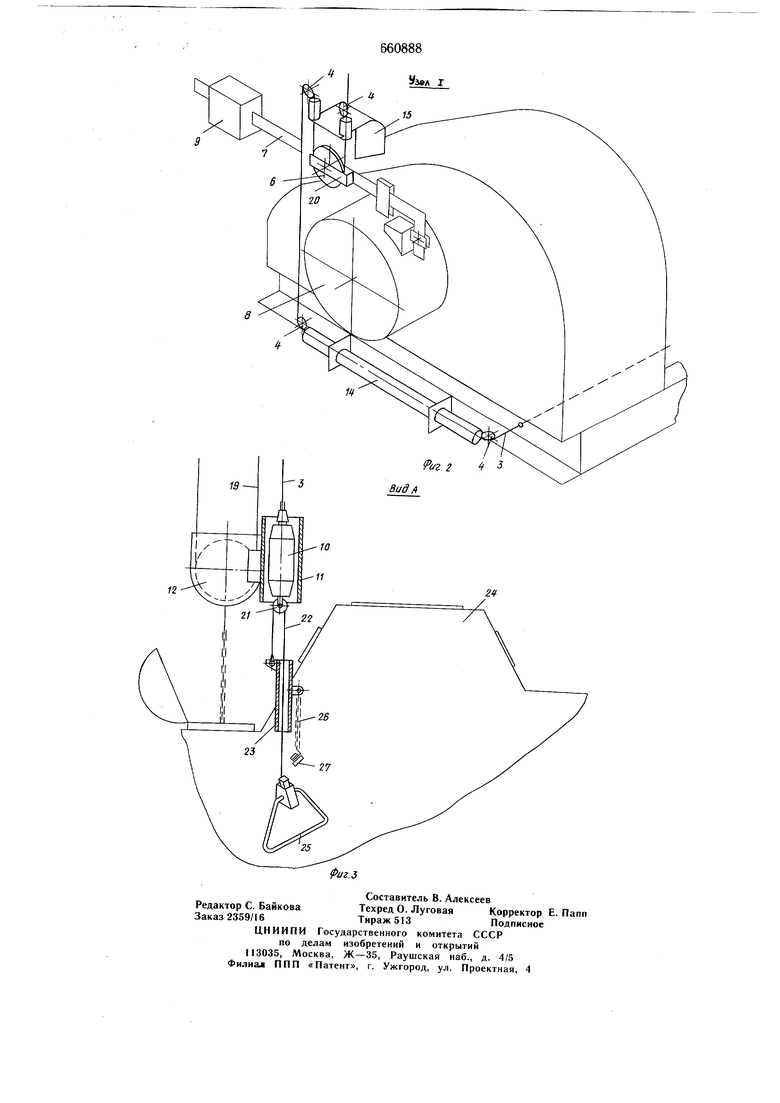
На фиг. 1 представлена схема предлагаемого устройства; на фиг. 2 - то же, узел I на фиг. 1; на фяг. 3 - вид по стрелке А на фиг. 1.
Устройство для дистанционного управления шлюпочной лебедкой со спасательных средств при спуске их на воду состоит из барабана 1, жестко закрепленного на тяговом барабане 2 лебедки соосно с последним. На Ьарабан 1 навит управляющий трос 3, запасованный в направляющие ролики 4, 5 и огибающий ролик 6, закрепленный на управляющем рычаге 7 тормоза 8 между тормозом и противовесом 9 рычага, а свободный конец управляющего троса 3 прикреплен к грузу 10,встроенному в патрубок 11, жестко закрепленный на подвеске 12. Ролики 4 с помощью кронщтейнов 13, 14, 15 и 16 закреплены на палубе судна, лебедке и станине щлюп-балки. Ролики 5, вращающиеся независимо от направляющих щкивов 17 и 18 тягового троса 19, закреплены соосно с последним на станине и стреле шлюп-балки.
Для постоянного контакта управляющего троса 3 с роликом 6 на последнем установлена ограничительная планка 20. На грузе
10 закреплен ролик 21, в который запасован трос 22, один конец которого закреплен на спасательном средстве, а сам трос образует петлю, ветви которой параллельны оси груза, например в закрытой спасательной шлюпке, один конец троса 22 закреплен на трубе 23, вваренной в корпус шлюпки 24, а второй - пропущен сквозь трубу 23 внутрь шлюпки и на нем с помоц;ью клина для зажима троса закреплена рукоятка 25. На кон-це трубы 23, введенном в шлюпку, нарезана резьба, а к трубе при помощи цепочки 26 прикреплена резьбовая пробка 27.
Устройство работает следующим образом.
В неработающем состоянии управляющий трос 3 находится в натянутом состояНИИ под действием груза 10, имеющего минимальный вес, необходимый для постоянного натяжения управляющего троса при вытравливании его или намотке на барабан 1.
Рычаг 7 под действием противовеса 9 опущен вниз и лебедка заторможена. При этом момент, создаваемый на рычаге 7 противовесом 9, компенсирует растормаживающий момент, возникающий от действия груза 10 на рычаг 7, и создает необходимый тормозной момент на тормозе 8 лебедки.
Для приведения устройства в рабочее состояние с помощью рукоятки 25 натягивают свободный конец троса 22, который, воздействуя через ролик 21 на груз 10, свободно движущийся в патрубке 11 в свою Очередь, натягивает управляющий трос 3, на котором закреплен груз. При натяжении управляющего троса 3 рычаг 7, удерживающий тор.моз, вместе с роликом 6 поднимается, тем самым растормозив лебедку.
При этом, так как скорость вытравливания троса зависит от диаметра слоя троса, сходящего с барабана, то ввиду разности диаметров тягового и управляющего тросов и намотки их в несколько слоев на барабаны 1 и 2 скорость спуска спасательного средства не совпадает точно со скоростью вытравливания управляющего троса... Поэтому при одинаковых числах оборотов барабанов 1 и 2 груз 10 перемещается в патрубке 11 относительно подвески 12 внекотг ыхпределах, которые могут быть минимальными при соответствующем расчете барабана.
Для остановки спасательного средства необходимо прекратить воздействие на рукоятку 25 и тем самым на свободный конец троса 22. При этом груз 10, на который в этом случае не действует усилие со стороны троса 22, под действием противовеса 9 переместится в патрубке 11 вверх относительно
подвески 12, заняв положение, в котором он находится при неработающем устройстве, а рычаг 7 под действием того же противовеса опустится в исходное положение, затормозив лебедку.
Таким образом, так как зажатие тормоза 8 лебедки зависит от величины подъема рычага 7, которая, в свою очередь, зависит от усилия воздействия на груз 10, то изменяя его (опуская или подни.мая груз) можно изменять скорость спуска спасательного средства.
При отходе шлюпки от борта судна для освобождения свободного конца троса 22 от рукоятки 25 необходимо ударить чем-либо по выступающей из нее части клина. При этом трос 22 сходит с ролика 21, освобождая груз 10. После выхода свободного конца троса 22 из трубы 23 на нее для герметизации шлюпки навинчивается пробка 27.
При подходе шлюпки к судну и ее подъеме на борт пробка 27 свинчивается с трубы 23, трос 22 запасовывается в ролик 21, а его свободный конец вводится через трубу 23 внутрь шлюпки и на нем закрепляется рукоятка 25. Такое выполнение устройства позволяет упростить конструкцию барабана управляющего троса и значительно уменьшить его линейный габарит. Кроме того, такая конструкция механизма управления устройством позволяет у.меньшить вес и габариты груза в подвеске (а, следовательно, вес и габариты самой подвески), а также отказаться от тросоукладчика.
Формула изобретения
Устройство для дистанционного управления шлюпочной лебедкой со спасательных средств при спуске их на воду, содержащее барабан, кинематически соединенный со шлюпочной лебедкой, груз в подвеске, связанный с барабаном управляющим тросом, огибаюшим ролик, и тор.моз, отличающееся, тем, что, с целью повышения надежности и удобства в эксплуатации, ролик, огибаемый управляющим тросом, установлен на управляюще.м рычаге тормоза между тормозом и противовесом, а груз в подвеске снабжен роликом, в который запасован трос, закрепленный на спасательном средстве.
Источники информации, принятые во вниание при экспертизе
1. Авторское свидетельство СССР 394287, кл. В 66 Д 1/50, 1969.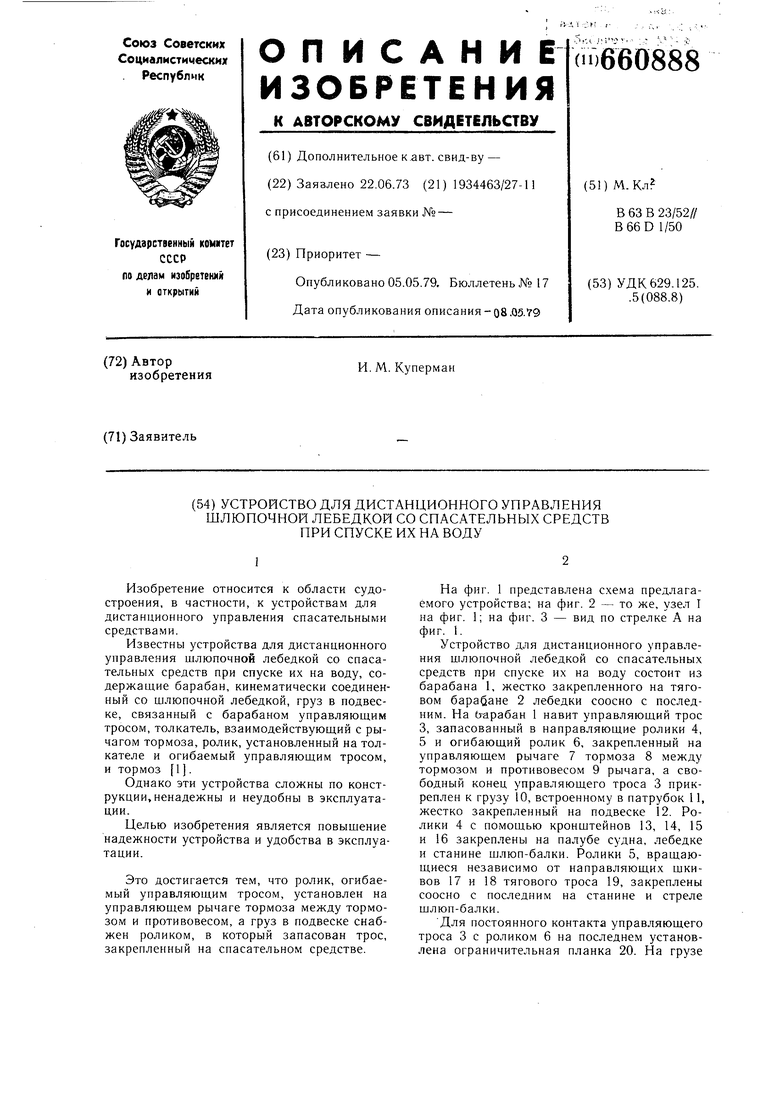
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ШЛЮНОЧНОЙ ЛЕБЕДКОЙ СО СПАСАТЕЛЬНЫХ СРЕДСТВ ПРИ СПУСКЕ ШЛЮПКИ НА ВОДУ | 1973 |
|
SU394287A1 |
| Устройство для дистанционной отдачи из спасательной шлюпки концевых звеньев шлюпочных талей | 1981 |
|
SU970807A1 |
| Устройство для управления спуском шлюпки | 1983 |
|
SU1110714A1 |
| Шлюпочный гак | 1983 |
|
SU1085888A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СПУСКОМ ШЛЮПКИ | 1972 |
|
SU426907A1 |
| ГРАВИТАЦИОННАЯ ШЛЮПБАЛКА | 1970 |
|
SU280252A1 |
| ЗАВАЛИВАЮЩАЯСЯ ШЛЮПБАЛКА | 1991 |
|
RU2027631C1 |
| ШЛЮПОЧНОЕ УСТРОЙСТВО&>&!Б1^^^::„. | 1970 |
|
SU278447A1 |
| Шлюпочный гак | 1982 |
|
SU1011447A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СПУСКОМ ШЛЮПКИ | 1971 |
|
SU420496A1 |