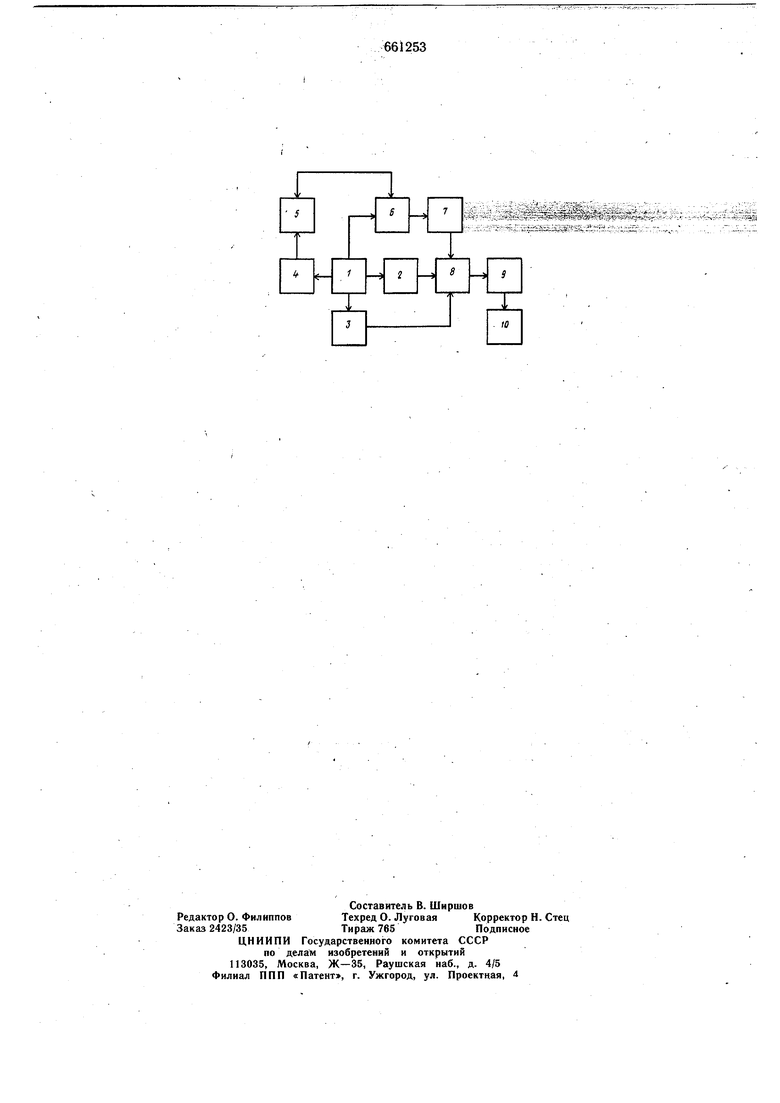
Изобретение относится к области весоизмерительной техники. Известны автоматические конвейерные весы, содержащие датчики веса и скорости ленты конвейера, подключенные к блоку перемножения, узел установки нуля, интегратор и регистрирующий прибор 1. Известны также конвейерные весы, содержащие датчики веса и скорости, обрабатывающую и регистрирующую аппаратуру, начала ленты и блок коррекции 2. Ближайщими по технической сущности являются автоматические конвейерные весы, содержащие датчики веса и скорости, подключенные к блоку перемножения, блок непрерывной коррекции по весу участков ленты конвейера в виде кинематически связанного с лентой редуктора, на выходном валу которого укреплен профилированный диск, взаимодействующий с блоком установки нуля, датчик начала ленты и блок регистрации 3. Известные весы не обеспечивают требуемую точность, что обусловлено изменением длины ленты конвейера, например, от изменения нагрузки. Цель изобретения - повыщение точносПоставленная цель достигается тем, что весы снабжены блоком поворота профилированного диска, вход которого связан с датчиком начала ленты, а выход подключен к блоку непрерывной коррекции по весу участков ленты конвейера. На чертеже показана блок-схема описываемых весов. Лента конвейера с грузоприемной рамой и секцией роликов 1 кинематически связана с датчиком 2 веса, датчиком 3 скорости, с датчиком 4 начала ленты, выход которого подключен к блоку 5 доворота и к блоку 6 непрерывной коррекции, выход которого подключен к блоку 7 установки нуля. Выход блока 5 доворота подключен на второй вход блока 6. К входу блока перемножения 8 подключены выходы датчиков 2 и 3 и блока 7 Выход блока 8 подсоединен к блоку 9 обработки сигнала, выход с которого поступает на блок 10 регистрации. Выполнение элементов и блоков схемы в конкретных случаях может быть различным. Датчик 2 веса представляет собой. например, рЬликбопору, к одному из концов которой прикреплена измерительная балочка с тензочувствительными сопротивлениями. Датчик скорости выполнен, например, в виде тахогенератора. Датчик 4 начала ленты может быть выполнен, например, в виде индуктивного датчика, который срабатывает при прохождении ферромагнитной метки начала ленты. Блок доворота можно реализовать, например, в виде механической рычажной системы, связанной с соленоидом, который срабатывает от датчика 4. Блок 6 непрерывной коррекции может быть выполнен, например, в виде редуктора, профилированного диска и рычажной системы. Редуктор, выходной вал которого связан с конвейерной лентой через ненагруженный ролик (с целью уменьшения проскальзывания), имеет коэффициент передачи такой, что при полном обороте ленты конвейера его выходной вал Делаетодин оборот. Профилированный диск насажен на выходной вал редуктора: Его профиль выполнен в соответствии с графиком погонного веса отдельных участков транспортерной ленты и взаимодействует через рычажную системы с блоком 7. Блоком 8 перемножения может служить, например, мостовая схема, выполненная на тензочувствительных элементах, питаемая напряжением с тахогенератора. Сигнал на выходе блока перемножения пропорционален количеству прошедшего по конвейеру материала при питании моста от датчика скорости, а разбаланс моста - пропорционален погонному весу прошедц его материала. Блок 9 обработки сигнала может быть выполнен, например, в виде преобразователя «напряжение-частота. Для получения более полных данных о ходе разгрузки (расход, вес одной загрузки, общий вес материала, прошедшего по конвейеру за смену, сутки и т. д.) в качестве блока 10 используют двоично-десятичный счетчик импульсов с электронной и электромеханической индикацией. Beсы работают следующим образом. При настройке системы (на холосто.м ходу) опытным путем определяется график изменения погонного веса транспортерной ленты зв один оборот. Согласно этому графику изготавливается профиль диска в блоке 6 непрерывной коррекции. Установив профилированный диск на выходном валу редуктора в соответствии с да,нйым участком ленты, включают конвейер. На выходе блока 8 сигнал равен нулю, так как при прохож-. дении любого участка ленты блок непрерывной коррекции автоматически вводит поправку в блок перемножения. При прохождении материала над датчиком 2 веса на выходе блока 8 будет сигнал, пропорциональный весу проходящего материала в единицу времени, т. е. расход. Блок 9 преобразует этот сигнал в частоту импульсов и интегрирует. На выходе блока 10 регистрации получают необходимую информацию. По окончании одного полного оборота ленты срабатывает датчик начала ленты 4 и выдает сигнал на доворот профилированного диска блока 6 непрерывной коррекции. Применение описанных автоматических конвейерных весов повыщает точность взвешивания и устраняет необходи.мость проведения периодической коррекции после каждого цикла взвешивания. Формула изобретения Автоматические конвейерные весы, содержап ие датчики веса и скорости, подключенные к блоку перемножения, блок непрерывной коррекции по весу участков ленты конвейера в виде кинематически связанного с лентой редуктора, на выходном валу которого укреплен профилированный диск, взаимодействующий с блоком установки нуля, датчик начала ленты и блок регистрации, отличающиеся тем, что, с целью повышения точности, они снабжены блоком доворота профилированного диска, вход которого связан с датчиком начала ленты, а выход подключен к блоку непрерывной коррекции по весу участков ленты конвейера. Источники информации, принятые во внимание при экспертизе 1.Карпин Е. Б. «Средства автоматизации для измерения и дозирования массы. М., «Машиностроение, 1971, с. 206-210, 354-391. 2.Патент США № 3868643, НКИ 340172,5, 1975. 3.Авторское свидетельство СССР 491836, G 11/14, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические конвейерные весы | 1974 |
|
SU491836A1 |
| Конвейерные весы | 1981 |
|
SU972241A1 |
| Электронные конвейерные весы с непрерывным контролем точности | 1980 |
|
SU943534A1 |
| Конвейерные весы | 1981 |
|
SU974136A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Автоматические конвейерные весы | 1983 |
|
SU1081428A1 |
| Конвейерные весы | 1980 |
|
SU879315A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ С ДИСКРЕТНОЙ СХЕМОЙ ИЗМЕРЕНИЯ | 1969 |
|
SU238814A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Весовое устройство | 1975 |
|
SU600397A2 |