.... ., - ., t .- ., Изобретение отйосится к области машиностроения и может быть использовано дйя загрузки деталями зубошевинговального станка.
Известно загрузочное устройство, состоящее из двух захватов, расположенных на поворотНом кротитейне передней части станка, и барабанноГр магазина t1).
Недостатками такого устройства являются сложность конструкции, в частности автооператора с №у1ля захватами, а также большяе габариты по фронту, обусловленные последовательным расположением станок - автооперат(ф - магазин.
Известно и другое загрузочное устройство, содержащее барабанный магазин с призмами, шпателем и механизмом деления и фиксации в ввде храпового колеса, подгфужиненного упора-фиксатора и собачки, закрепленной на йотоке привода. Рядом с устройством расположен автооператор с захватом, который транспортирует деталь в зону обработки станка t2J
Недостатком данного устройства является трудность его применения для зубошевинговального станка из-за вертикального расположения
деталей в магазине и сложности траектории движения автооператора.
Целью изобретения является упрощение конструкции и повыщениё надежности работы устройства.
Для зтого автооператор установлен с возможность) вдзвратно-пбстуйатшьного Перемещения на направляю1цей, закрепленной на колонне барабанного магазина, механизм деления и фиксации которого снабжен закреплеиным на оси упора роликом и раСполбжённым на штоке привода нагфавляющим пальцем, причем собачка вьшолнеиа с двумя опорными поверхностями, одна из которых взаимодействует с указанньпм роликом, а другая - с Направляющим пальцем.
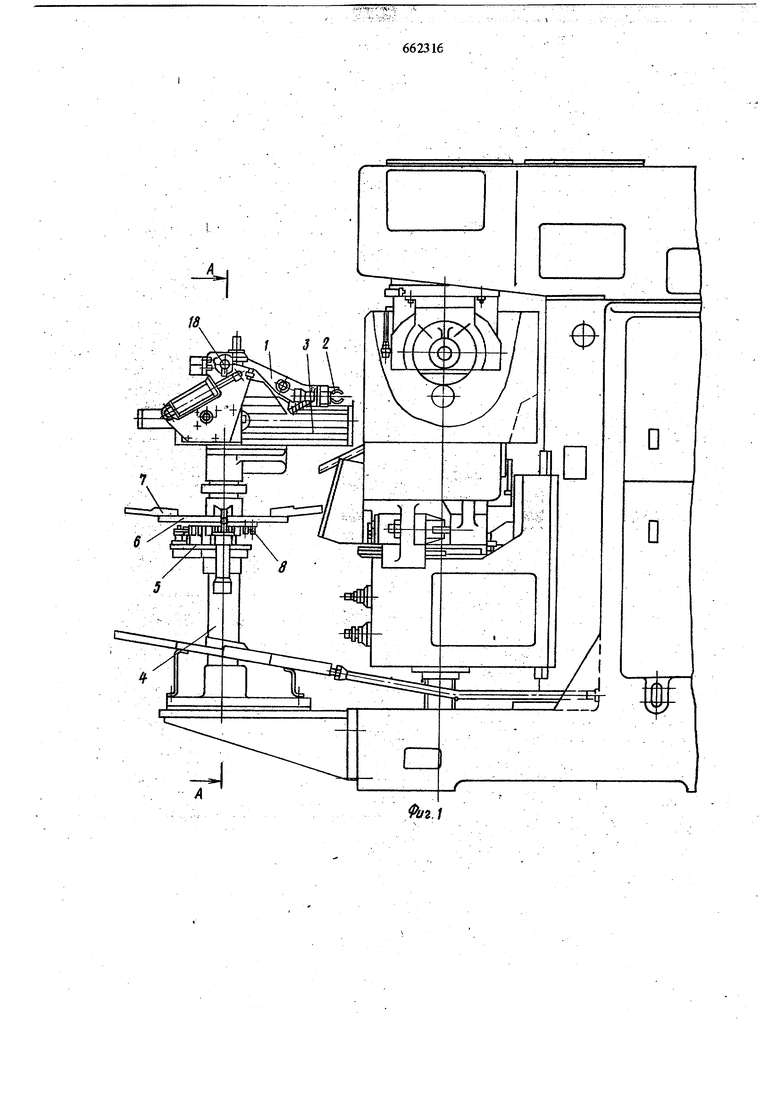
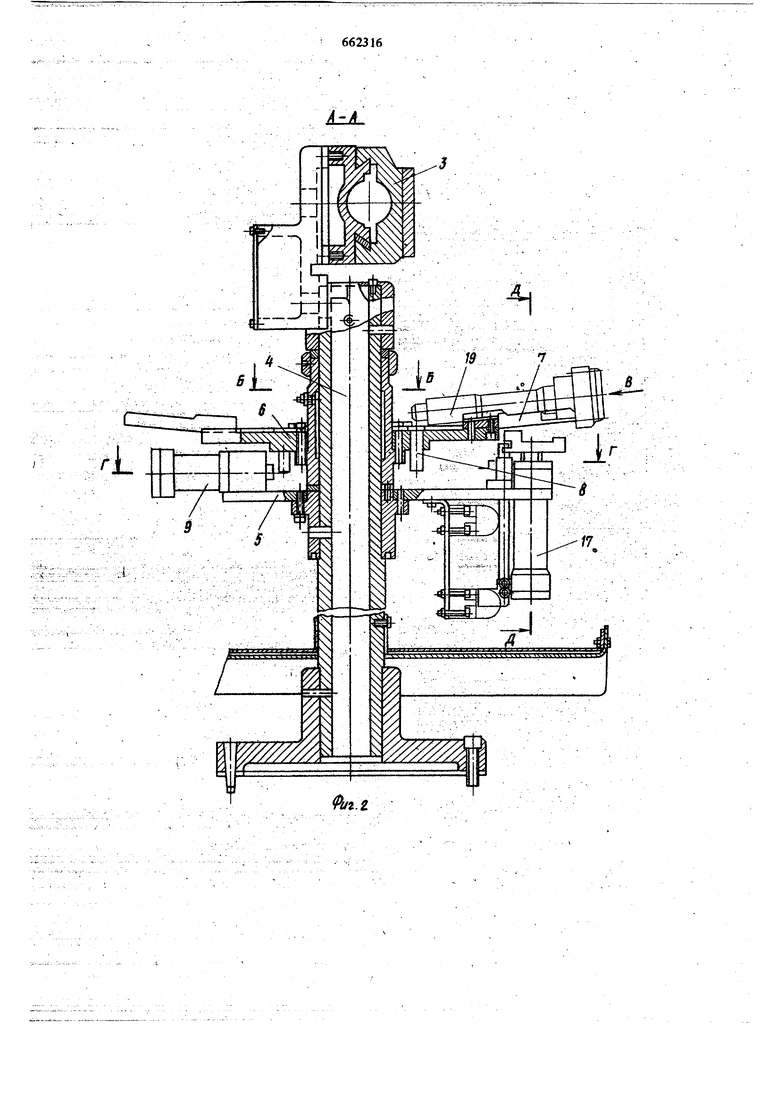
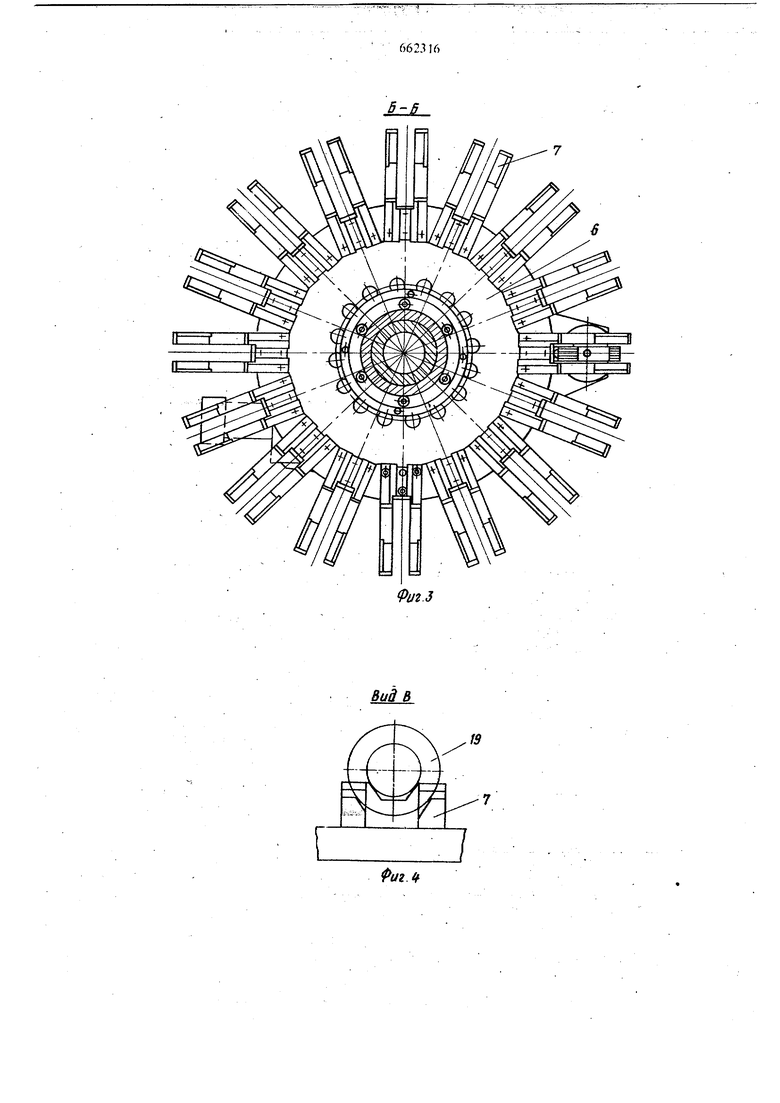
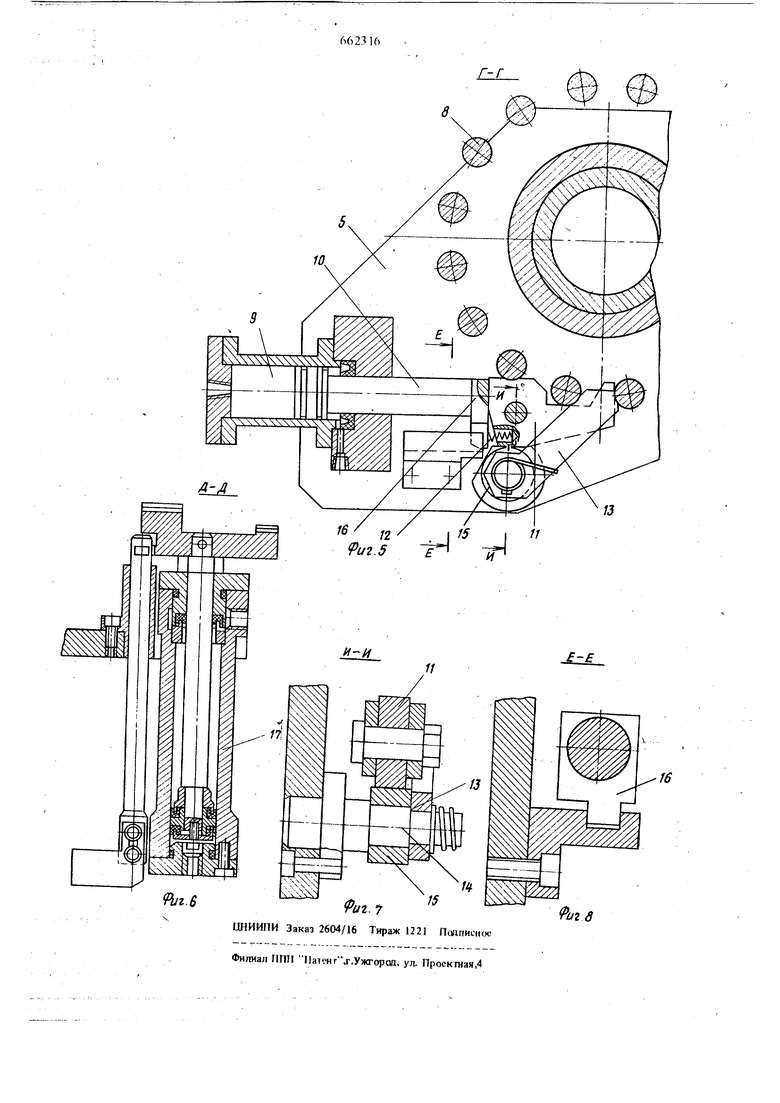
На фиг. 1 показан общий вид загрузочного устройства; на фиг. 2 - разрез А-А на фиг.; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг.4 вид В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - разрез Д-Д на фиг. 2; на фиг. 7 - разрез И-И на фиг. 5; на фиг. 8- разрез Е-Е на фиг. 5..
Загрузочное устройство содержит автооператор 1 с захватом 2 и направляющей 3, уста HQ6ЯefiEШoй на колоине 4. Магазин имеет Kqpпус 5, барабанный магазин 6с базовыми прнзмами 7 и штырями 8. Механизм деления и стола (см. фиг. 5) включает гидроКИПКНДР 9, шток 10 с собачкой 11 и пружиной 12, кюдпружиншный упор 13, установлент А на оси 14 совместно с рюликом 15, на{фавляющий палец 16. Под стопом установлен ffiiiaiejib 17. Автооператор поворачивается воКр оси 18 в момент разгрузки и захвата детали 19.
Загрузочное устройство работает следующим образом.
Детали укладывают радиально на базовые . Все УЗЛЫ и механизмы находятся в исходном положении, автооператор отведен влево и находится в верхнем положении, kte показано на фиг. 1, питатель 17 - в нижнем положении. Захват 2 автооператора 1 открыт. Начинается цикл загрузки. Автооператор, поворачиваясь вокруг оси 18, устанавливает захват 2 против базовой призмы с деталью. Питатель 17 перемещается вверх через окно в призме и зано(Жт деталь 19 в захват aBToonepdtopa. Захват закрывается, несколько приподнимая деталь над питателем 17. Затей П1 ойосодитповорот автооператора вокруг оси 18 и перемещение автроператора по направляющим 3 в зону обработки.
В зоне обработки деталь закрепляется, например, при помощи центровых бабок, а автооператор уходит из зоны. По окончании обработки автооператор входит в зону, захватом берет (Сработанную деталь 19 и выходит из зоны, перемещаясь по направляющим 3 в крайнее левое положение и поворачиваясь вокруг OQH 18, устанавливает заЗсват против базовой призмы. Захват раскрывается, питатель опускаetciil укладывая обработанную деталь на призму. Затем происходит поворот стола следующи образом.
Шток 10 гидроцилнндра 9 перемещается в левое положение (см. фиг. 5). Собачка И, поворачиваясь вокруг своей оси, прощелкивает относительно промежуточного щтыря 8. Дополнительный подпружиненный упор 13 в это время удерживает стол от поворота. При перемещении щтока 10 вправо собач 11 своим концом упирается в очередной штырь 8 и поворачивает стол до тех пор, пока следующий штьфь не упрется в боковую поверхность с6бачки. В это время одна опорная поверхность собачки контактирует с жестко сидящим на ойи 14 роликом 15, а Другая - с направляющим пальцем 16, упор 13 прощелкивается.
Формула изобретения Загрузочно-разгрузочное устройство, содерзкащее автооператор с захватом, барабанный магазин на колонне с базовыми призмами, питателем и механизмом деления и фиксации, выполненным в виде установленного на неподанжной оси подпружиненного упора и подпружиненной собач1си, щарнирно -закреплеиной на штойе привода, обличающееся тем,
|Что, с целью у1 ощенш конструкгдаи и повышения надежности работь устройства, автооператор установлен с возможностью возвратнойоступательного перемещения на направляющей, закрепленной на колонне барабанного магазина,
механизм деления и фиксащш которого снабжек здкретшенным на оси упор& роликом и расположенным на штоке привода ыаправляк щим пальцем, причем собачка вьшолнена с двумя опорными поверхностями, одна из которых
взаимодействует с указанным роликом, а црутая с напра:&}18{оааш пальцем.
Источники информации, принятые во внимание при зкспе1 тизе
1.Патент ФРГ № 1075923, кл. 49 d 23/04, 1965.
2.Малов А.Н. Загрузочное устройство для металлорежу1цих станков, М., Машиностроение, ,1965, с. 342-343, ф. 207 а, б.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1168382A2 |
| Загрузочно-разгрузочное устройство | 1982 |
|
SU1068262A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Робототехнологический комплекс | 1984 |
|
SU1202862A1 |
| Автооператор | 1979 |
|
SU831516A1 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1237372A1 |
| Многопозиционный станок | 1984 |
|
SU1220735A1 |
| Загрузочно-разгрузочное устройство | 1977 |
|
SU667379A1 |
| Загрузочное устройство | 1974 |
|
SU500020A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |