(54) ШАГОШЙ КОНВЕЙЕР.
Это достигается тем, что привод вьшолйеи 6 бйде силового цилиндра, установленного на непбдвйжнЬ й рсйк и рвяэаяного штоком с тягой,а конвейер оснащен мехгшизмом фиксации носители, копире, одноплечим рычагом и зубчатой муфтой, смонтированной на одной из осей роликов и жест ко связанной одной своей половиной с. крив жтпом, а другой - с одш97 плёчим рычагсж, установленным шарнирно на оси ролика Ь возможностью взаимодействия с копиром, при этом бйь силового цилиндра расположен в плоскости перемещения осей роликов. Механизм ксации (юсителя может быфь выполнен в вид« ШбЬ и§ат : ро д, установленных на тягах и вз иа4одейству1Ь1цих с криво ШпвЙ й рй йЬШстс 4 ходе носителя.
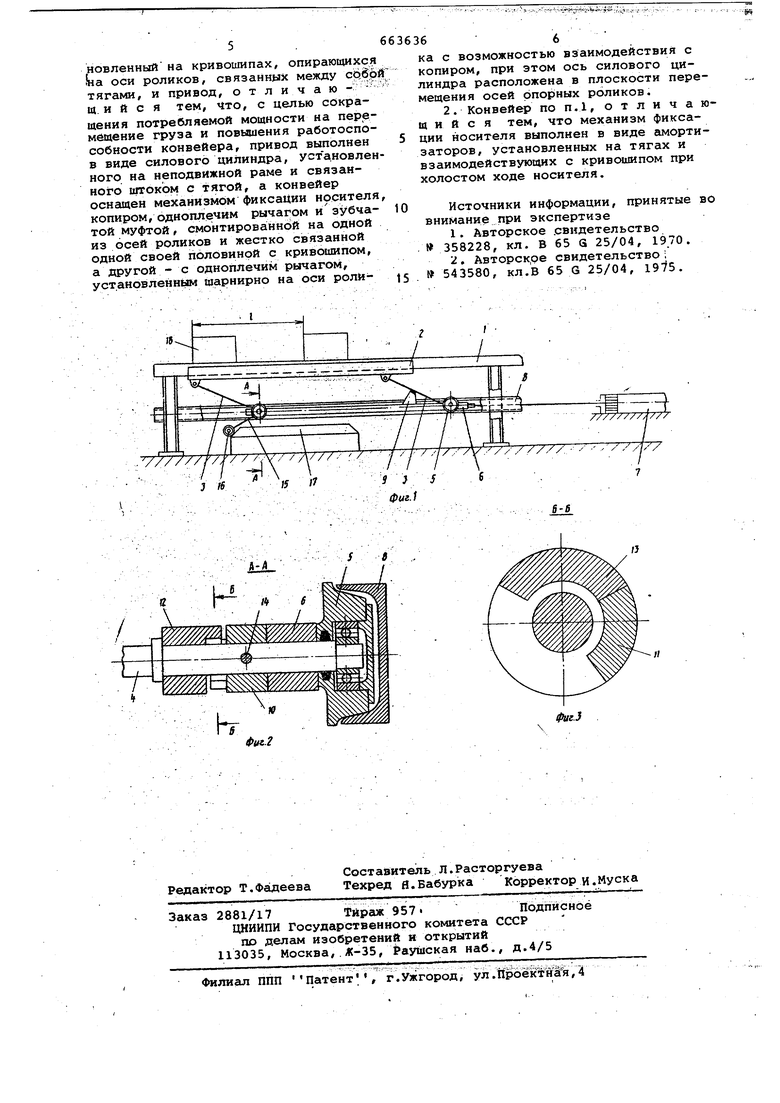
На Фиг.1 изоОргикен предлагаемый ;.контейер, об18Ий вид; на фиг.2 дан разрез А-А на фиг.1; на фиг.З разрез. Б-Б на фи.2
Конвейер сост;с)нт из неподвижной рг1МЁ1 1 и по вйжйой рама в виде носителя 2, устй4овлёйного на кривошипах 3, которые опираются на оси 4 роликов 5. При этом оси 4 связаны между собой тягами 6.
конвейера выполнен в виде еильвогО цилиндаа 7, IHTOK которого с тягой 6. Ось силовогоци- , Жйдра 1|Е с йойож на в плоскости пере- ме{дения осей 4 опорных роликов 5, йоторйэ ШгУ йеремещаться по яаправл 8.
На тягах 6 установлен механизм 9 фикса1{Йи носжтепя, выполненнс в виде KpoHGiTeftHbB с амортизаторами, азаимодействукхцими с кривсяшпги 3 при ХШ1ОСТОМ ходе носителя 2. ka одной из осей 4 yetановлёна зубчатая муфта, сЬстогйцая из полумуфты 10 с зубом 11 и полумуфты 12 с эУбом 13. Полумуфта 10 жестко сёяэайа с кривойипом 3 и одно ремейно за4 к ;ирована H& оси 4 ctonopOM 14. Полумуфта 12 установлена на оси 4 1|Щ5ШрЙ& и жёсткд е1вйзана с одноплцчим рычагом 15, ИМ1(Я«1М на другом конце ролик 16 для вэай1м(6де1ст ШГя с копиром 17, вшюлиенным в виде пяанки с двумя скосами.
Конвейер работает следующим обpjagoM. - ----.---.-----.-..,л«1,..,- , ..
В Исходном положении гРУЗ 18 лежит на ргиле 1, носитель 2 опущен ниже рамы 1 и опирается через кривошипы 3 на амортизаторы механизма фиксации 9. При том рычаг 15 с роликом 1б под действием силы тяжести Зайимаёт вертикальное положение, а между зубьями 11 и 13 образуется зазор
По сигналу включается силовой ци,линдр 7 и начинается рабочий ход, при этом подвижная рама на роликах 5 по направля рщим 8 начинает двигать663636
ся вправо. После соприкосновения ролика 16 со скосом копира 17 начинается поворот рычага 15 до тех пор, пока зуб 11 полумуфты 10 не придет а соприкосновение с зубом 13 полумуфты 12. При дальнейшем движении ролика 16 по скосу копира 17 через одноплечий рычаг 15 начинается поiopcit почасовой стрелке полумуфты 12 и находящейся с ней в соприкосновении полумуфты 10, которая через криВсййипы 3 вызывает подъем носитеЯ 2. Так как оба кривошипа 3 располбжёнЫ Hia одной оси 4 и зафиксированы стопорами 14, то они поворачиваются одновременно, обеспечивая подъем носителя 2 без пеоекосов.
ПоДьем носителя 2 длится до выхоа ролика 16 рычага 15 на горизонтаьньШ участок копира 17, при этом носитель 2 поднимается над неподвижной рамой 1 и принимает на себя груз. В период движения ролика 16 ычага 15 по горизонтальному участку копира 17 груз 18 переносится на шаг расстояние ).
В конце хода цилиндра 7 ролик 16 1ялчага 1,5 начинает двигаться вниз по йторому скосу копира 17/ при этом Происходит взаимный поворот полумуфт 12 и 10 против часовой стрелки и сйнотвётствённо опускание носителя 2.
Носитель 2 опускается до тех пор, пока кри&сошпы 3 не лягут на амортизаторы (Механизма фиксации 9, при груэ 11ереходйт на неподвижную раму 1.
S конечный момент движения цилиндра 7 вправо под действием силы тяжести рычаг 15 с роликом 16 заниtas вё{:ИгИкги1ьноё положение, при между зубом 11 полумуФты 10 и зубом 13 полумуфты 12 образуется зазор - рабочий ход закончен.
По сигналу включается цилиндр 7 и начинается холостой ход подвижной рамы влево. Первоначально ролик 16 рычага 15 Движется по скосу копира 17, при этом зазор между зубьями 11 и 13 увеличивается. Затем ролик 16 рычага 15 движется по горизонтеШьйому Участку и по скосу копира 7/ . - : , , , ,
IB конечный мс5мейт движения цилиндра 7 влево под действием силы тяжести рычаг 15 с роликом 16 занимает ёёртикяяьнъё положение - холостой зсрД закончен, цилиндр 7 выключается. S ПёрйЙд хоШэстЪго хода носитель 2 опираете на амортизаторы мюханиэма фиксации 9. Затем цикл повторяется.
Данная конструкция конвейера позволяет сократить потребляетлую мощность На перемещение груза и повысить работоспособность.конвейера. Формула изобретения
1. Шаговый конвейер, включающий неподвижную раму, носитель, установленный на кривошипах, опирающихся на оси роликов, связанных между сбДр тягами, и привод, отличаю - ц и и с я тем, что, с целью сокращения потребляемой мощности на перемещение груза и повышения работоспособности конвейера, привод выполнен в виде силового цилиндра, установлен ного на неподвижной раме и связанного штоком с тягой, а конвейер оснащен механизмом фиксации носителя копиром, одноплечим рычагом изубчатой муфтой, смонтированной на одной из осей роликов и жестко связанной одной своей половиной с кривошипом, а другой - с одноплечим рычагом, установленным шарнирно на оси роли66ка с возможностью взаимодействия с копиром, при этом ось силового цилиндра расположена в плоскости перемещения осей опорных роликов. 2. Конвейер по п.1, отличающийся тем, что механизм фиксации носителя выполнен в виде гшортизаторов, установленных на тягах и взаимодействующих с кривошипом при холостом ходе носителя. Источники информации, принятые во внимание при экспертизе 1. Авторское .свидетельство №358228, кл. В 65 в 25/04, 1970. . Авторское свидетельство ; 543580, кл.В 65 G 25/04, 19-:5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1977 |
|
SU745807A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| Шаговый конвейер | 1979 |
|
SU878683A2 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Устройство для съема изделий с подвесного конвейера | 1988 |
|
SU1539147A1 |
| Устройство для группирования стержнеобразных изделий | 1981 |
|
SU986823A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
S в
