Цель изобретения - повышение надежности работы конвейера.
Цель достигается тем, что механизм возврата носителя в исходное ноложение выполнен в виде двух дополнительных роликов, закрепленных на толкателе, и дополнительного упора, который установлен на подвижной раме с возможностью взаимодействия с дополнительными роликами. При этом дополнительный упор выполнен в виде двух вертикальных пластин, которые расположены на подвижной раме но обе стороны цени.
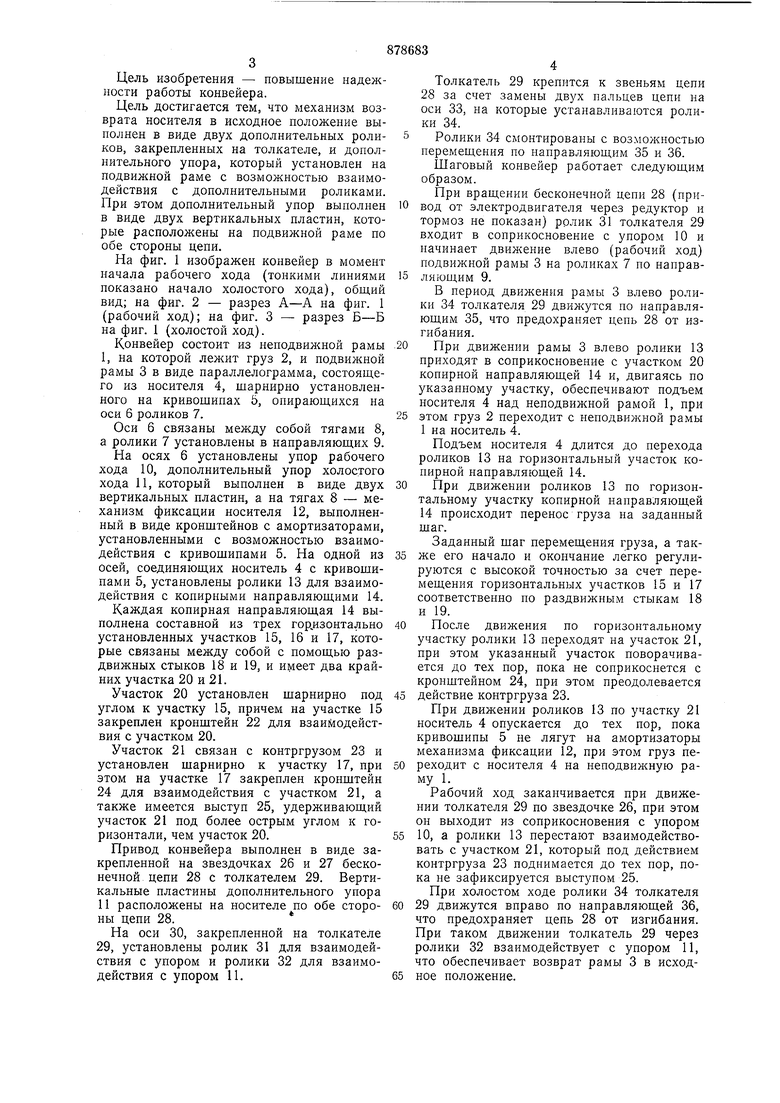
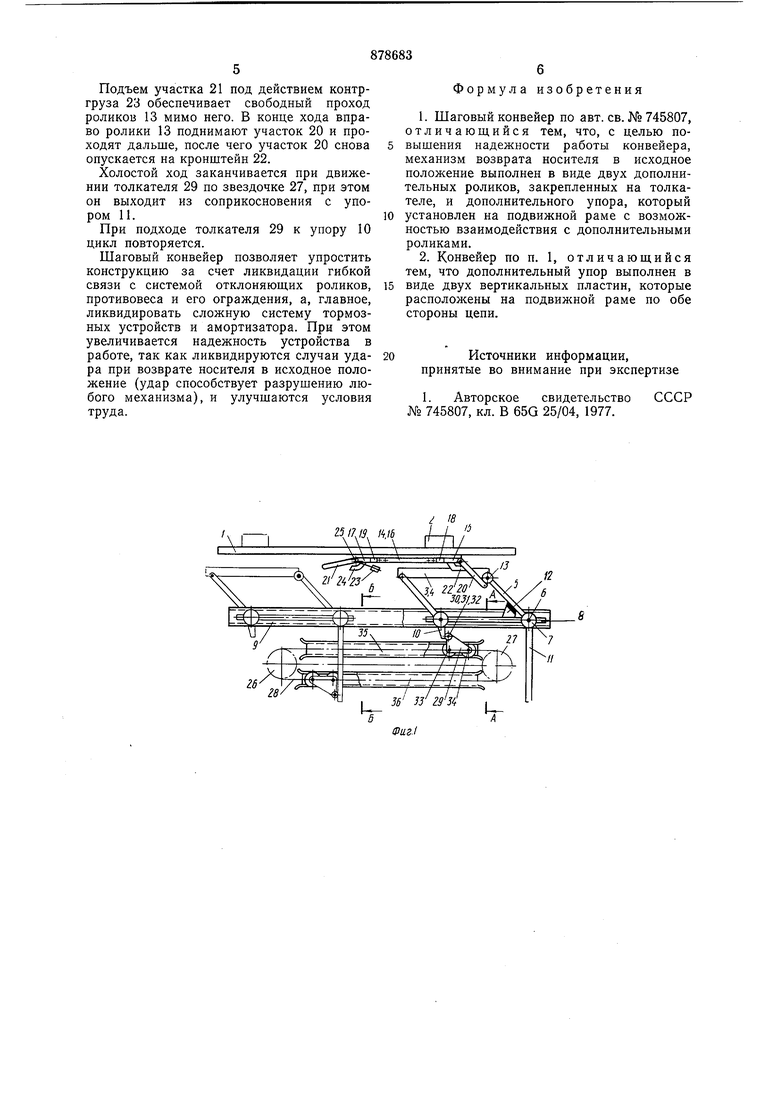
На фиг. 1 изображен конвейер в момент начала рабочего хода (тонкими линиями показано начало холостого хода), общий вид; на фиг. 2 - разрез А-А на фиг. 1 (рабочий ход); на фиг. 3 - разрез Б-Б на фиг. 1 (холостой ход).
Конвейер состоит из неподвил ной рамы 1, на которой лежит груз 2, и подвижной рамы 3 в виде параллелограмма, состоящего из носителя 4, шарнирно установленного на кривошинах 5, опирающихся на оси 6 роликов 7.
Оси 6 связаны между собой тягами 8, а ролики 7 установлены в направляющих 9.
На осях 6 установлены упор рабочего хода 10, дополнительный упор холостого хода 11, который выполнен в виде двух вертикальных пластин, а на тягах 8 - механизм фиксации носителя 12, выполненный в виде кронщтейнов с амортизаторами, установленными с возможностью взаимодействия с кривошипами 5. На одной из осей, соединяющих носитель 4 с кривошипами 5, установлены ролики 13 для взаимодействия с копирными направляющими 14.
Каждая копирная направляющая 14 выполнена составной из трех гор,изонтально установленных участков 15, 16 и 17, которые связаны между собой с помощью раздвижных стыков 18 и 19, и имеет два крайних участка 20 и 21.
Участок 20 установлен шарнирно под углом к участку 15, причем на участке 15 закреплен кронштейн 22 для взаиг юдействия с участком 20.
Участок 21 связан с контргрузом 23 и установлен шарнирно к участку 17, при этом на участке 17 закреплен кронштейн 24 для взаимодействия с участком 21, а также имеется выступ 25, удерживающий участок 21 под более острым углом к горизонтали, чем участок 20.
Привод конвейера выполнен в виде закрепленной на звездочках 26 и 27 бесконечной цепи 28 с толкателем 29. Вертикальные пластины дополнительного упора 11 расположены на носителе по обе стороны цепи 28.
На оси 30, закрепленной на толкателе 29, установлены ролик 31 для взаимодействия с упором и ролики 32 для взаимодействия с упором 11.
Толкатель 29 крепится к звеньям цепи 28 за счет замены двух пальцев цепи на оси 33, на которые устанавливаются ролики 34.
Ролики 34 смонтированы с возможностью перемещения по направляющим 35 и 36.
Шаговый конвейер работает следующим образом.
При вращении бесконечной цепи 28 (привод от электродвигателя через редуктор и тормоз не показан) ролик 31 толкателя 29 входит в соприкосновение с упором 10 и начинает влево (рабочий ход) подвижной рамы 3 на роликах 7 по направляющим 9.
В период движения рамы 3 влево ролики 34 толкателя 29 движутся по направляющим 35, что предохраняет цепь 28 от изгибания.
При движении рамы 3 влево ролики 13 приходят в соприкосновение с участком 20 копирной направляющей 14 и, двигаясь по указанному участку, обеспечивают подъем носителя 4 над неподвижной рамой 1, при
этом груз 2 переходит с неподвижной рамы 1 на носитель 4.
Подъем носителя 4 длится до перехода роликов 13 на горизонтальный участок копирной направляющей 14.
При движении роликов 13 по горизонтальному участку копирной направляющей 14 происходит перенос груза на заданный шаг. Заданный шаг перемещения груза, а также его начало и окончание легко регулируются с высокой точностью за счет перемещения горизонтальных участков 15 и 17 соответственно по раздвижным стыкам 18 и 19.
После движения по горизонтальному участку ролики 13 переходят на участок 21, при этом указанный участок поворачивается до тех пор, пока не соприкоснется с кронштейном 24, при этом преодолевается
действие контргруза 23.
При движении роликов 13 по участку 21 носитель 4 опускается до тех пор, пока кривошипы 5 не лягут на амортизаторы механизма фиксации 12, при этом груз переходит с носителя 4 на неподвижную раму 1.
Рабочий ход заканчивается при движении толкателя 29 но звездочке 26, при этом он выходит из соприкосновения с упором
10, а ролики 13 перестают взаимодействовать с участком 21, который под действием контргруза 23 поднимается до тех нор, пока не зафиксируется выступом 25.
При холостом ходе ролики 34 толкателя
29 движутся вправо по направляющей 36, что предохраняет цепь 28 от изгибания. При таком движении толкатель 29 через ролики 32 взаимодействует с упором 11, что обеспечивает возврат рамы 3 в исходное положение.
Подъем участка 21 под действием контргруза 23 обеспечивает свободный проход роликов 13 мимо него. В конце хода вправо ролики 13 поднимают участок 20 и проходят дальше, после чего участок 20 снова опускается на кронштейн 22.
Холостой ход заканчивается при движении толкателя 29 по звездочке 27, при этом он выходит из соприкосновения с упором 11.
При подходе толкателя 29 к упору 10 цикл повторяется.
Шаговый конвейер позволяет упростить конструкцию за счет ликвидации гибкой связи с системой отклоняющих роликов, противовеса и его ограждения, а, главное, ликвидировать сложную систему тормозных устройств и амортизатора. При этом увеличивается надежность устройства в работе, так как ликвидируются случаи удара при возврате носителя в исходное положение (удар способствует разрушению любого механизма), и улучшаются условия труда.
Формула изобретения
1.Шаговый конвейер по авт. св. № 745807, отличающийся тем, что, с целью повышения надежности работы конвейера, механизм возврата носителя в исходное положение выполнен в виде двух дополнительных роликов, закрепленных на толкателе, и дополнительного упора, который
установлен на подвижной раме с возможностью взаимодействия с дополнительными роликами.
2.Конвейер по п. 1, отличающийся тем, что дополнительный упор выполнен в
виде двух вертикальных пластин, которые расположены на подвижной раме по обе стороны цепи.
20Источники информации,
принятые во внимание при экспертизе
СССР
1. Авторское свидетельство № 745807, кл. В 65G 25/04, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1977 |
|
SU745807A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Шаговый конвейер | 1977 |
|
SU663636A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| Автомат для передачи кирпича-сырца с выдающего кирпич транспортера резательного станка на полки люлечного конвейера | 1960 |
|
SU139960A1 |
| Установка для кирпича-сырца на полочные вагонетки | 1978 |
|
SU772869A1 |
| Периодический вертикально-замкнутый конвейер | 1974 |
|
SU524748A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| В РАБОЧУЮ ЗОНУ ТЕХНОЛОГИЧЕСКИХ МАШИН | 1973 |
|
SU408830A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
, К16
-f
/ 8
Hi
I I
у у V 5
А-А
Фаг2
Ё-б
11г О4 Д
