3
А-А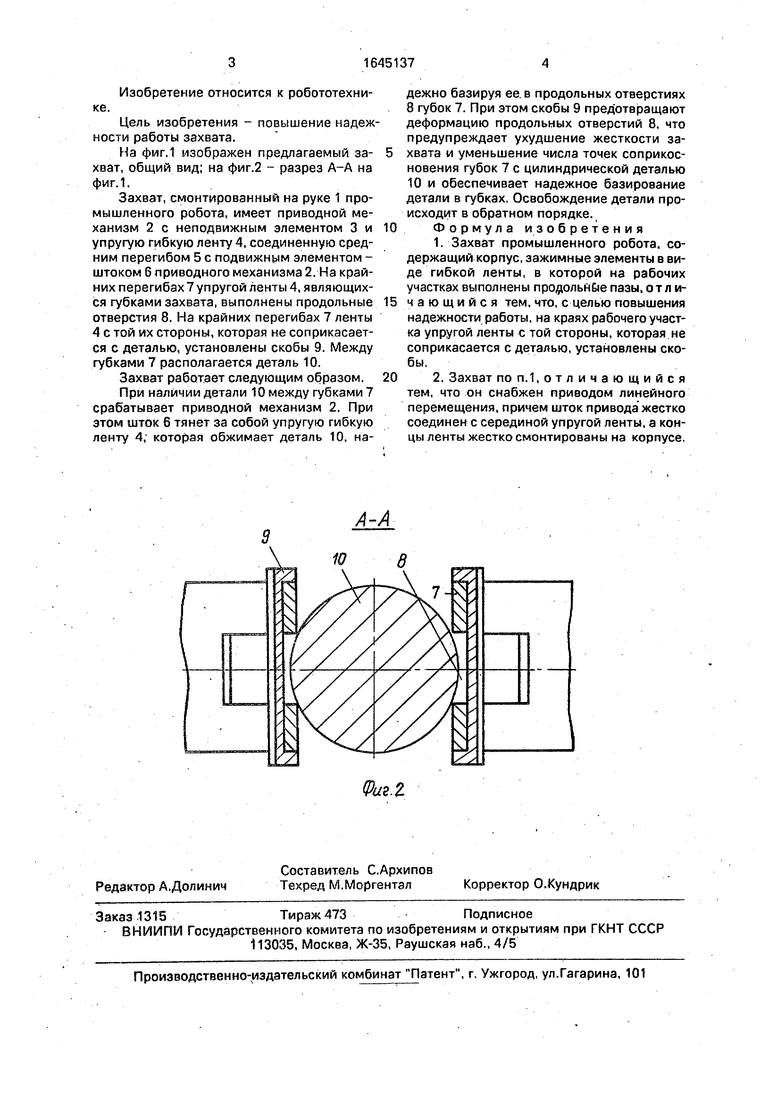
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Устройство для соединения лент-носителей разделяющихся застежек-молний с замком | 1990 |
|
SU1790910A2 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Устройство для соединения лент-носителей разделяющихся застежек-молний с замком | 1989 |
|
SU1734670A1 |
| Захват промышленного робота | 1978 |
|
SU666074A2 |
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
| Захват промышленного робота | 1988 |
|
SU1696299A1 |
| Подающий механизм для последовательной подачи с гибкой несущей ленты установленных в ней с равными промежутками крепежных деталей с головками и клепальная машина | 1985 |
|
SU1512477A3 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
Изобретение относится к робототехнике. Цель изобретения - повышение надежности захвата в работе. Захват, смонтированный на руке 1 промышленного робота, имеет приводной механизм 2 с неподвижным элементом 3 и упругую ленту 4, соединенную средним перегибом 5 с подвижным элементом - штоком 6 приводного механизма. На рабочих участках 7 упругой ленты 4, являющихся губками захвата, выполнены продольные отверстия. Деталь надежно базируется в продольных отверстиях губок, при этом скобы 9 предотвращают деформацию продольных отверстий. 1 з.п.ф-лы, 2 ил.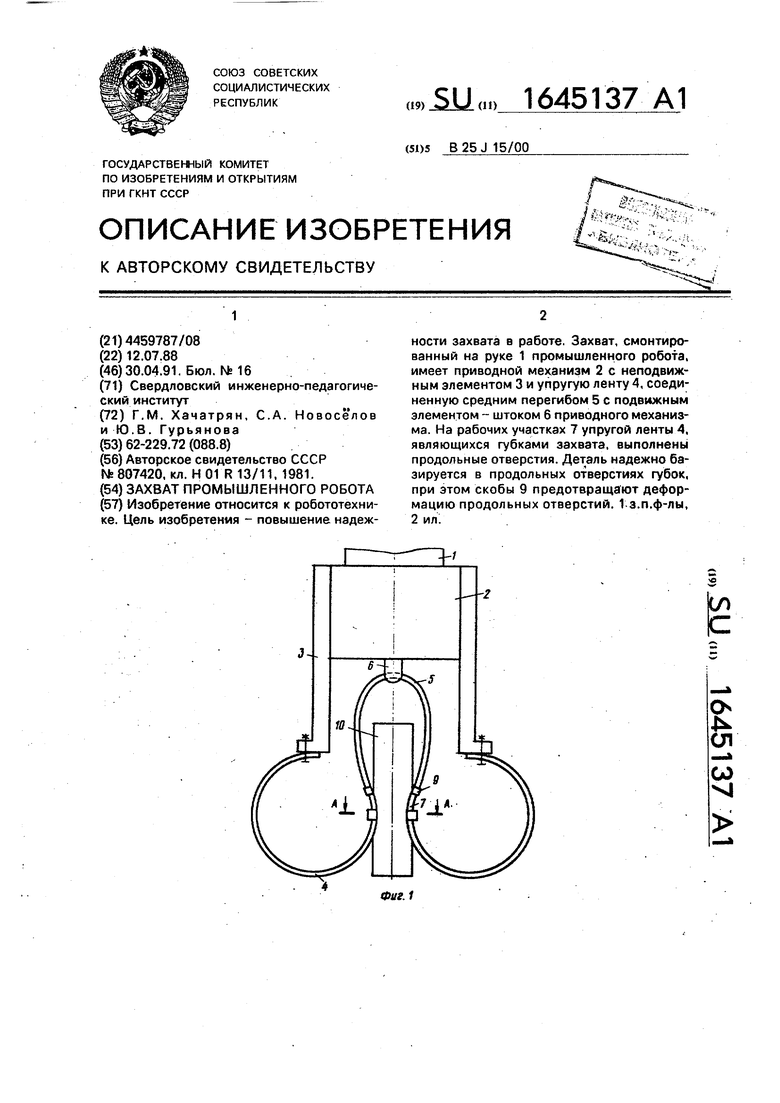
| Контактное устройство для электрическихСОЕдиНЕНий | 1978 |
|
SU807420A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
