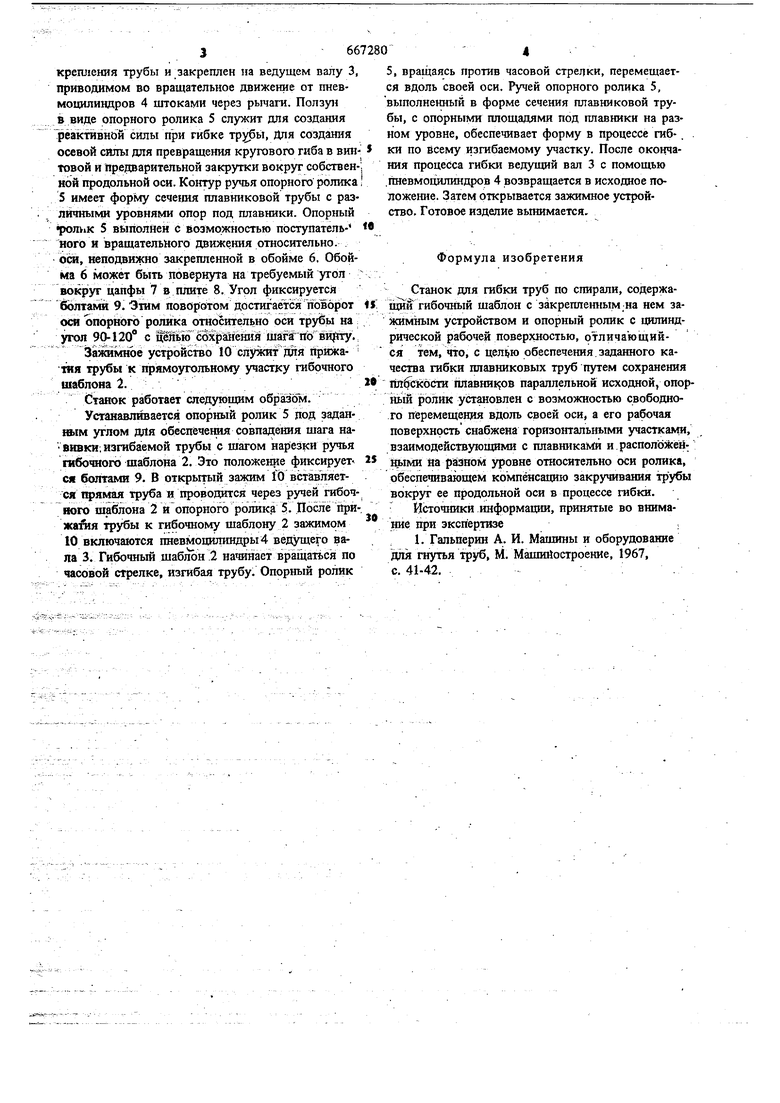
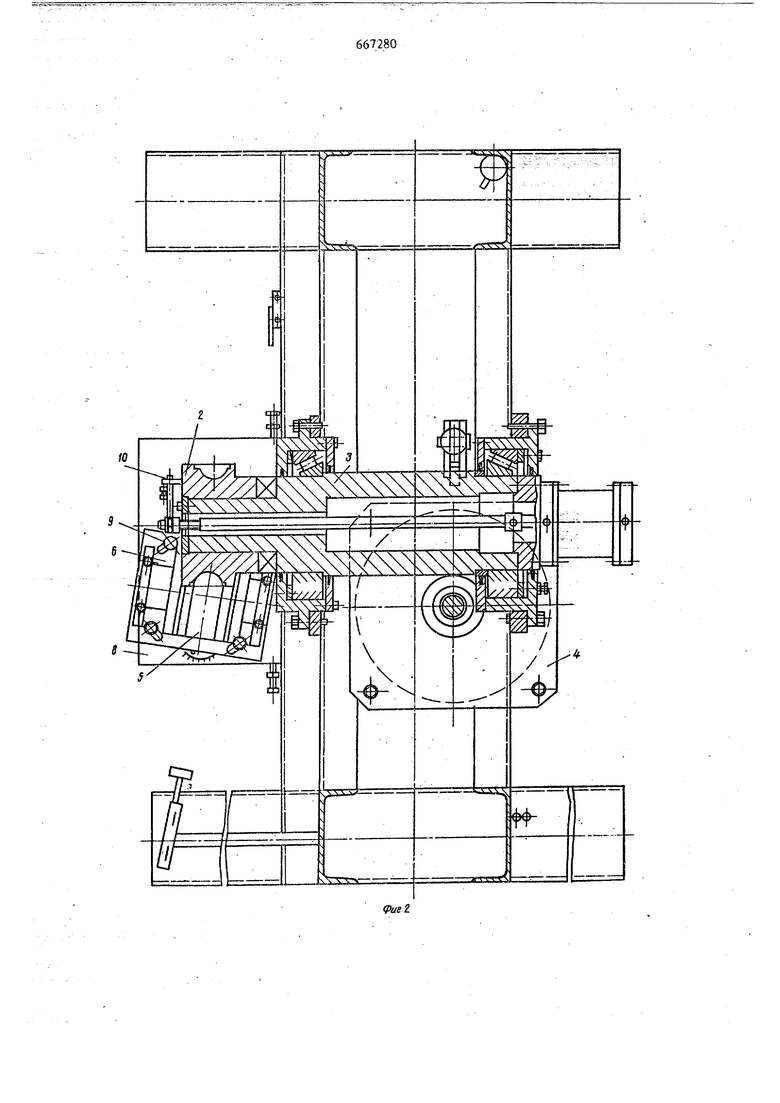
. Изобретение относится к обработке металлов Давлением, в частности к устройствам для гибки угловых трубных элементов и может быть исполь зовано для котлов со слабонаклоненной навивкой экранных поверхностей нагрева с диаметром трубы до 60 мм. Известен станок для гибки трубы по спирали, содержащий гибочный шаблон с установленным на нем зажимным устройством и опорную колодку для создания реактивной и осевой силы для превращения кругового гиба в винтовой С ручьем под заготовку Щ. Известный станок при гибке плавниковьк труб по винтовой линии при изготовлении угпо вых. элементов котлов со слабонаклоненной на-, вивкой не обеспечивает сохранение плоскости плавников параллельно исходной в связи с тем, что при наматывании до винтовой линии наблюдается закручивание волокон металла трубы вокруг ее продольной оси. Сохранение плавников в плоскости параллельной исходной необходимо для обеспече1шя стыковки гнутого элемента с примыкаюишми элементами. Целью изобретения является обеспечение заданного качества гибки плавниковых труб путем сохранения плоскости плавников параллельной исходной. Цель достигается тем, что опорный ролик установлен с возможностью свободного перемещения вдоль своей оси, а его рабочая поверхность снабжед1а горизонтальными участками, взаимодействующими с плавниками и расположенными на разном уровне относительно оси ролика, обеспечивающем компенсацию закручивания трубы вокруг ее продольной оси в процессе гибки. На фиг. 1 Изображен предлагаемый станок, общий вид;- на фиг. 2 - то же, вид в плане; на фиг. 3 - опорный ро.лик, продольный разрез; на фиг. 4. - опорный ролик и обойма; на фиг. 5 - ручей опорного ролика, поперечное сечение. Станок для гибки плавниковых труб содержит сварную станину 1, для крепле1шя всех узлов, гибочный щаблон 2, ручей которого изготовлен по профилю плавниковой трубы. Ось ручья - винтовая линия с заданным тагом. Гибочный шаблон 2 имеет прямой участок для
крепления трубы и закреплен на ведущем валу 3, приводимом во вращательное движение от пневмоцилиндров 4 штоками через рычаги. Ползун в виде опорного ролика 5 служит для создания Трёактивной силы при гибке , Для создания осевой силы для превращения кругового гнба в винтовой и Предварительной закрутки вокруг собственной продольной оси. Контур ручья опорного ролика 5 имеет форму сечения плавниковой трубы с различными уровнями опор под плавники. Опорный рольк 5 вьшолйен с возможностью поступатель- ного и вращательного движения относительно. oiOT, неподвижно закрепленной в обойме 6, Обойма 6 может быть повернута на требуемый угол вокруг цапфы 7 в плите 8. Угол фиксируется болтами 9. Этим поворотом достигаётсяЕ поворот оси опорного ролика относительно оси TpyiSbi на угол 90-120 с рлйоSS pffieiiaiS шаШЯоВ1
Зажимное устройство 10 служит для гфижатая трубы к прямоугольному участку гибочного шаблона 2.
Станок работает следуюгцим обр|йбм.
Устанавливается опорный ролик 5 дод заданffiiiM углом дяя обеспечения совпадения шага навивки, изгибаемой трубы с шагом нарезки ручья гибочного шаблона 2. Это положение фиксирует СИ боптами 9. В открытый зажим 10 вставляется прямая труба и проводится через ручей гибочного шаблона 2 и опорного ролика 5. После йрижа ия трубы к гибочному шаблону 2 зажимом 10 включаются пневмоцилиндры4 ведущего вала 3. Гибочный шаблон 2 начинает вращаться по часовой стрелке, изгибая трубу. Опорный ролик
5, вращаясь против часовой стредки, перемещается вдоль своей оси. Ручей опорного ролика 5, выполненный в форме сечения плавниковой трубы, с опорными площадями под плавники на разном уровне, обеспечивает форму в процессе гибки по всему изгибаемому участку. После окончания процесса гибки ведущий вал 3 с помощью .пневмоцшпшдров 4 возвращается в исходное положение. Затем открывается зажимное устройство. Готовое изделие вьшимается.
Формула изобретения
Станок для гибки труб по спирали, содержа1ции гибочный шаблон с закрепленным-на нем зажимным устройством и опорный ролик с цилиндрической рабочей поверхностью, отличающийся тем, что, с обеспечения заданного качества гибки плавниковых труб путем сохранения плбскости ifmaBHHu oB параллельной исходной, опорный ролик установлен с возможностью свободного перемещения вдоль стоей оси, а его рабочая поверхность снабжена горизонтальными участками, взаимодействующими с плавниками и расположен1Ш1МИ на разном уровне относительно оси ролика, обеспечивающем компенсацию закручивания трубы вокруг ее продольной оси в процессе гибки. Источники информащш, принятые во внимание при экспертизе,
1. Гальперин А. И. Машины и оборудование длл гнутья труб, М. Машийостроение, 1967, с. 41-42.;.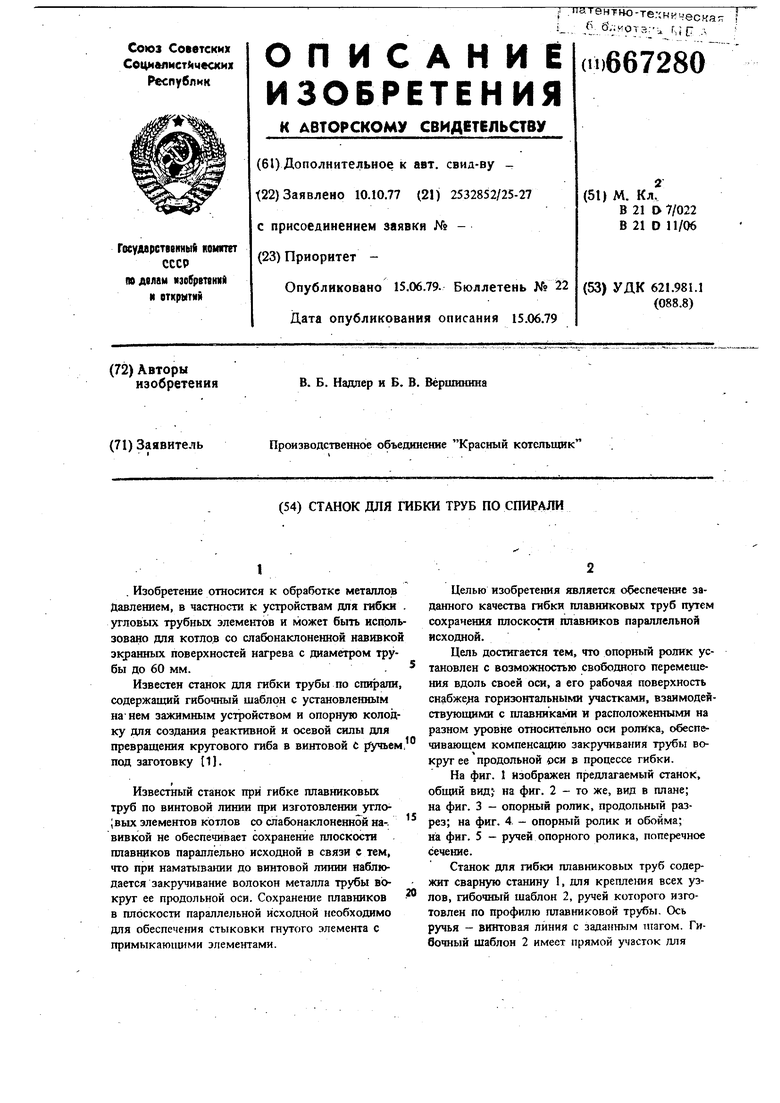
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Трубогибочный станок | 1981 |
|
SU988410A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1156768A2 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Трубогибочное устройство | 1976 |
|
SU573224A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| Трубогибочный станок | 1975 |
|
SU659235A1 |

t/e..5
