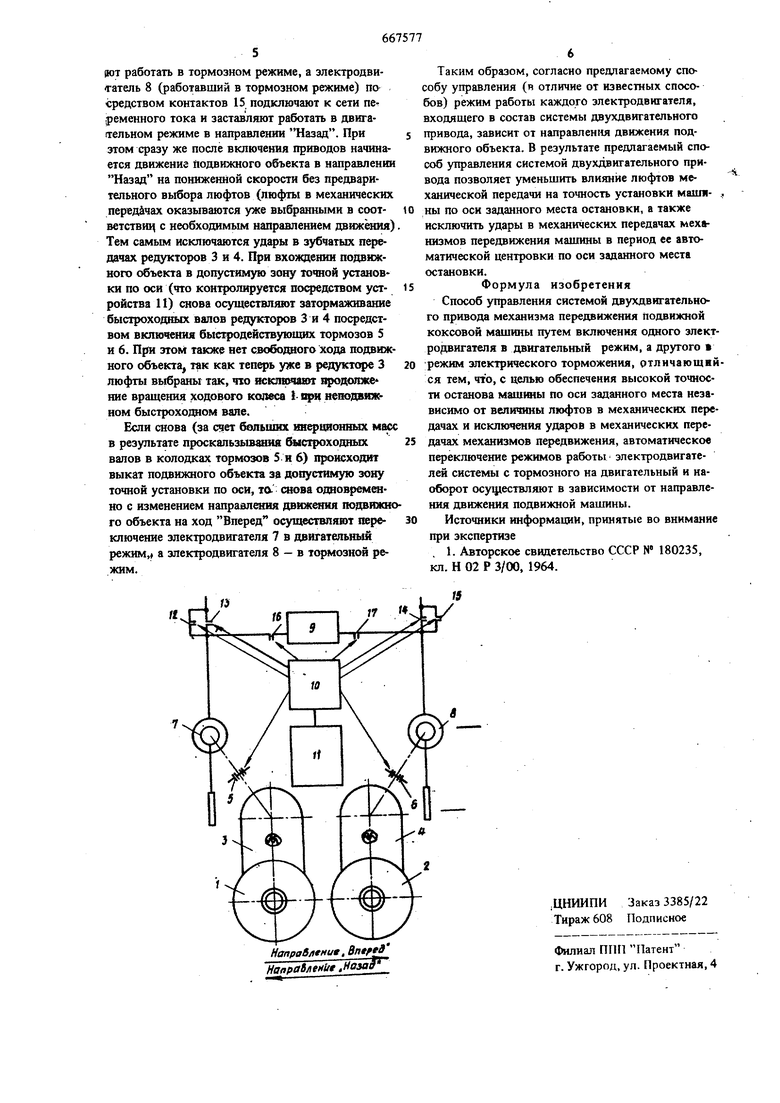
ния) нз устройства 10, а асинхронной электродви гатель 8 - к сети переменного тока посредством контактов 14 или 15 из того же устройства 10. При тормозном режиме асинхронные электродвигатели 7 и 8 отключают от сети переменного тока и подключают к источнику 9 постоянного то ка посредством контактов 16 и 17 (соответственно) из устройства 10. При автоматической центровке подвижного объёйта по оси заданного места остановки коман ДЁ1дл1г управления приводом поступают в устрой ство 10 из устройства 11. Управление системой двухдвигательного привода осуществдшот следующим образом. Для. перемещения подвижного объекта в направлении Вперед к оси заданного меСта останов ки оба электродвигателя 7 и 8 посредством контактов 12 и 14 из устройства 10 (а При направлении Назад контактами 13 н 15) подключают к сети переменного тока, т.е. оба электродвигателя включают в двигательный режим. При этом подвижный объект движется вперед к заданному мес ту остановки, на номинальной скорости. При подходе к заданному месту остановки осу ществляют замедление хода подвижного объекта путем перевода обоих электродвигателей 7 и В из двигательного режима в режим динамического тор% ожения. Для этого контактами 12 и 14 электродвигатели 7 и 8 отключают от сети переменного тока и посредством контактов 16 и 1 подключают к источнику 9 постоянного тока. После снижения скорости перемещения подвиж ного объекта перед остановом привод переводят на пониженную скорость. Для этого электродвигатель 7 посредством контактов 16 отключают от источника 9 постоянного тока и посредством контактов 12 подключают к сети переменного тока , а электродвигатель 8 оставляют подключеннь1М через контакты 17 к источнику 9 постоянного тока, т.е. электродвигатель 8 оставляют работать в тормозном режиме, а электродвигатель 7 переводят в двигательный режим. Благодаря такому В{слючению электродвигателей Привода получают йбниженнуй скорость перемещения подвижного объекта, а также достигают того, что люфты в механических пер(8дачах (см. вырывь на редукторах 3 и 4) выбрайы в разные стороны. , Когда подвижный объект входит в допустимую зону точной установки по оси заданного места останова, из устройства 10 поступает команда на срабатывание быстродействующих тормозов 5 и 6 для осуществления окончательного останова гфйвода. При неподвижных быстроходных валах перемещение подвижного объекта (из-за продолже; ния вращения ходовых колес за счет выбора люфтов в зубчатых передачах редукторов) не наблю.дается, taK как люфты в редукторах 3 и 4 выбраны л разные , причем в редукторе 4 они выбраны так, что при неподвияйтам быстроходном вале исключается продолжение вращения ходового колеса 2 в том же направлении. Одна| о из-за большой инерционной массы подвижного объекта или из-за большой ветровой нагрузки на подвижный объект в направлении его движения Вперед подвижный объект может выкатиться за допустимую зону точной установки по оси за счет проскальзывания быстроходных валов редукторов 3 и 4 в колодках тормозов 5 Н 6. В подобных случаях требуется включение |1ривода для перемещения подвижного объекта направлении Пазад к оси заданного места ос: тановки. , По известным способам управления двухдвигательным приводом дня возвращения подвижного объекта назад в допустимую зону точной установки по оси осуществляют повторное включение злектродвигателя 8 в тормозной режим, а электродвигатель 7 включают в двигательный режим, но р противоположным вращением, т.е. с изменением направления движения подвижного объекта не осуществляют переключения режимов работы электродвигателей, входящих в систему двухдвигательного привода (другими словами, двигательный и тормозной режимы закрепляют за определенными злектродвигателя«4и, входящими в систему двухдвигательного привода, независимо от направления движения ведомого подвижюго объекта). В результате в начале включения на пе ремещение подвижного объекта происходит выбор люфтов в обратную сторону в редуктбре 3 с ударом в момент вхождения в зацепление, а затем начинается движение подвижного объекта без наличия тормозного момента системы до окончания выбора люфтов в редукторе 4 с ударом в конце выбора. При этом, если подвижный объект входит в допустимую зону до окончания выбора люфтов в редукторе 4, после затормаживания быстроходных валов тормозами 5 и 6 продолжается движение подвижного объекта за счет выбора люфтов в зубчатых передачах редукторов 3 и 4, причем при больших,люфтах подвижный объект может снова выходить (но теперь в другую сторону) за допустимую зону точной установки. Иногда это приводит к появлению автоколебаний подвижного объекта над осью заданного места остановки. По предлагаемому способу управления систе; мой двухдвигательного привода для возвращения подвижного объекта ходом Назад в допустимую зону точной установки по оси одновременно с измейением направления движения подвижного объекта осуществляют переключение режимов работы электродвигателей 7 и 8, а именно по сигналам, поступающим из устройства 11 в устройство 10, электродвигатель 7 (работающий в двигательном режиме) посредством контактов 16 подключают к источнику 9 постоянного тока и заставля
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1995 |
|
RU2075637C1 |
| УСТРОЙСТВО ДЛЯ РЕОСТАТНОГО ТОРМОЖЕНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ | 1999 |
|
RU2148506C1 |
| Способ управления двухдвигательным асинхронным электроприводом | 1989 |
|
SU1690164A1 |
| Механический каскад двух трехфазных асинхронных двигателей | 1940 |
|
SU90515A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
