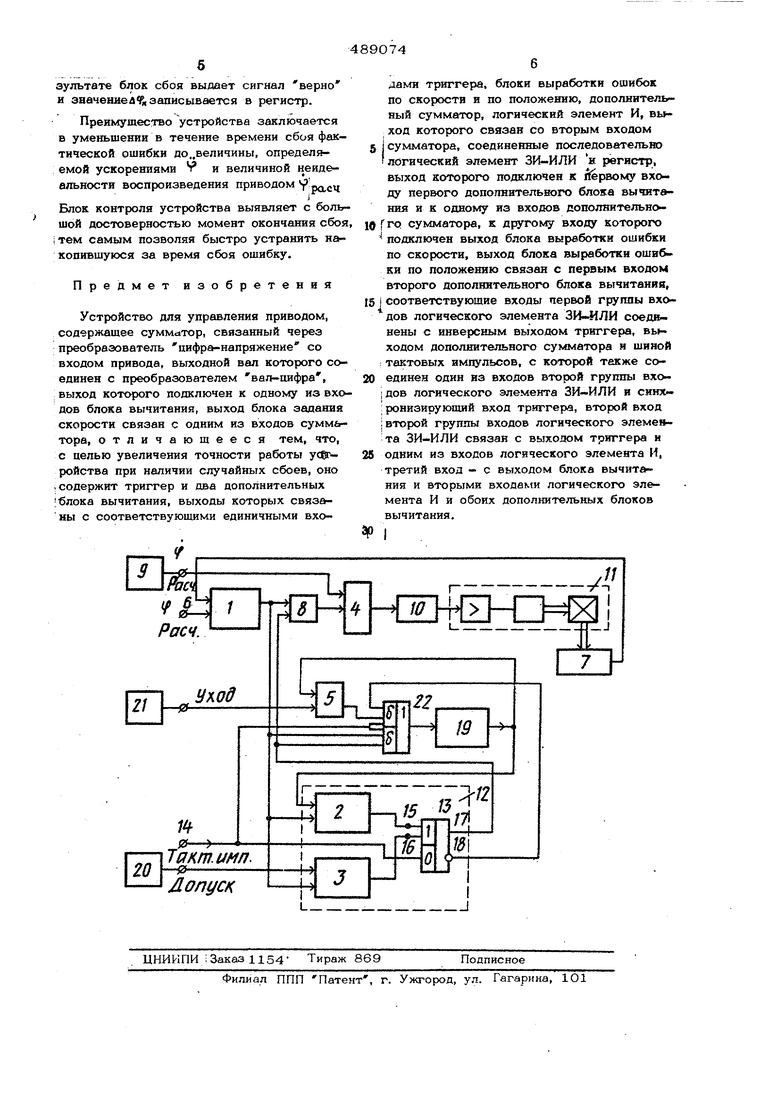
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении автоматичес ких систем управления технологическими объектами. Известны устройства для управления I приводом, содержащие сумматор, связанный через преобразователь цифра-напряЕженне со входом привода, выходной вал которого соединен с преобразователем вал-цифра, выход которого подключен к одному из ВХОДОВ блока вычитания, выход блока задания скорости связан с одним из ВХОДОВ сумматора. При -наличии случайных сбоев вычислительного устройства и преобразователя код-цифра снижается точность работы, так как при этом происходит ложное движение привода В случае, если время наличия сбоев больше, чем постоянная времени привода. Цель изобретения - увеличить точность работы устройства при наличии случайных сбоев, Это достигается тем, что устройство содержит триггер и два дополнительных блока вычитания, выходьг которых связаны с соответствующими единичными входами триггера, блоки выработки ошибок по скорости и по по,пожению, дополнительный сумматор, логический элемент И, выход которого связан со BTOpbfM входом сумматора, соединенные последовательно логический этемент ЗИ-ИЛИ и регистр, выход которого подключен к первому входу первого дополнительного блока вычитания и к одному из ВХОДОВ дополнительного сумматора, к другому ВХОДУ которого подключен ВЫХОД блока Выработки ошибки по скорости, ВЫХОД блока выработки ошибки по положению связан с первым входом второго дополнительного блока вычитания, соответ ствуюшие ВХОДЫ первой группы входов логического элемента ЗИ-ИЛИ соединены с инверсным ВЫХОДОМ триггера, выходом дополнительного сумматора и шиной тахтовых импульсов, с которой также соединен один из ВХОДОВ второй группы ВХОДОВ логического элемента ЗИ-ИЛИ и сннхроннзируюшнй вход триггера, второй ьход второй груипы входов логи lecKoro элемента ЗИ-ИЛИ связан с выходом триггера я о ним из входов логического эпеклента И, третий вход - с выходом блока вычитания и вторыми входами логического элемента И и обоих дополнительных блоков вычитания. На чертеже представлена блоя схема устройства. Она содержит блоки вычитания 1, 2 я 3 и сумматоры 4, 5. На вход 6 блока вычитания 1 (т.е. вход устройства) поступает код, тфопорцнональный расчётному.лу поворота привода . { аш-) преобразователя . - ., 1 Разностный код с выхода блока выЧйтания 1 поступает на логический элемент И 8. Сумматор 4 складывает код, пропорци.овальный расчетной скорости поворота - - поступающий с блока задания скорости 9 я код с выЛода логического элементаiTi 8 Преобразователь цифра-напряжение 10 осуществляет управление приводом 11, ко торый содержит, например, усилитель, двигатель и редуктор. В блок контроля 12 входит триггер 13, который устанавливается в состояние 1 в момент прихода тактовых импульсов по шине 14 при наличии хотя бы на одном из его входов 15 и 16 высокого потенциала, в противном случае триггер устанавливается в состо$ь« ние О и сохраняет это состояние до прихода следующего тактового импульса. В состоянии I на прямом выходе 17 триггера устанавливается высокий потенциал, а на инверсном выходе 18 - низкий потенциал, в состоянии О - наоборот. На входе 15 триггера появляется высокий потенциал, когда абсолютная величина кода, поступающего с регистра 19, больше абсолютной величины кода, поступак шего с блока вычитания 1. На входе 16 триггера появляется высокий потенпиал, когда абсолютная величина кода, поступающего по шине допуск из блока выработки ошибок по положению 20, больше абсолютной величины кода блока вычит ния 1. Код, поступающий по шине уход с блока 21 выработки ошибки по скорости, в сумматоре 5 складывается по абсолютной величине с кодом с регистра 19, про ходит через логический элемент ЗИ-ИЛИ 22 в момент прихода тактовых импульсов по шпне тактовых импульсов 14 при нали чии высокого потенциала на выходе 18 триггера, при наличии высокого потенциала на выходе 17 триггера логический эл&мент ЗИ-ИЛИ пропускает код блока вычитания 1. Работа устройства заключается в следующем. На выходе блока вычитания 1 образуется код разности: лЧ f, Если блок контроля сигнализирует о правильной работе устройства, при этом трнгГер находится в состоянии , то на выходе сумматора 4 формируется код упра& леиия приводом pacч. - лУ . . В случае, когда блок контроля 12 выявляет сбой, управле ие приводом ведется только по скорости, логический элемент И при этом закрыт. Блок контроля формирует сигнал верно по приходу тактового импульса в том х:шучае, .еслв /Af/- 7Ai.on;//. где u8oR величина допустимой ошибки рассогласования, или же :// 1/ М 1-1/и где t i, ( - моменты времени последовательно приходящих тактовых импульсов. Такой алгоритм контроля справедлнв для пр1ь водов, работающих без перерегулирования и после окончания переходного процесса от включения приводов в работу и до начала переходного процесса выключения их. Во время сбоев устройства, происходящих иэ-за поступления неверных значений . ЯИ счет неидеального выдерживания приводом скорости fp и при наличии Y происходит медленное нарастание ощибки Д PipecKm поэлому начиная с момента | выявления сбоя выражениепре- образуется в ,, где )iecTb & Уцаа-хт за время, равное одному такту. Реализуется эта зависимость с помощью сумматора 5, логического элемента ЗИ-ИЛИ, срабатывающего по приходу тактовых импульсов, и регистра 19, хранящего код . Таким образом, к моменту К окончания сбоя должно выполняться неравенство Д«ода1А где ачх рассчитано на момент , в ре-}.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| Устройство для функционального контроля цифрового привода | 1975 |
|
SU670925A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Фотоэлектрический анализатор количества и размеров частиц | 1987 |
|
SU1518727A1 |
| Цифровой измеритель центра тяжести видеосигналов | 1990 |
|
SU1723559A1 |
| Устройство для приема сигналов относительной фазовой телеграфии | 1983 |
|
SU1138954A1 |
| Цифровой синтезатор функций | 1980 |
|
SU879609A2 |
| Устройство для автоматического контроля преобразователя угол-код | 1974 |
|
SU470850A1 |
| Устройство для управления группой из @ объединенных по выходу тиристорных преобразователей | 1986 |
|
SU1394376A1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
