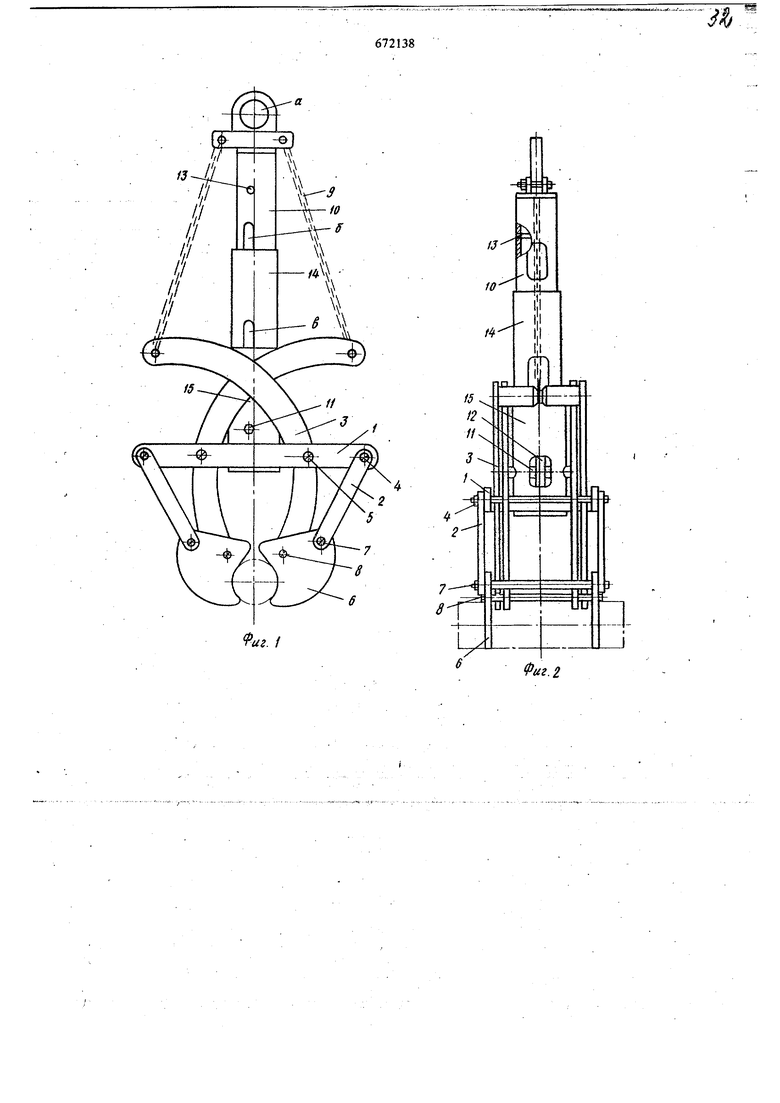
(54) ЗАХВАТ ДЛЯ ПОДЬЕМА иИЛИИДРИЧЕСКИХ ГРУЗОВ
казан). Механизм фиксации выполнен телескопическим и сострит из внутреннего нолзуна 10, нмеющего продольные пазы б для прохода оси 11 и звездочки 12, толкателя 13, жестко связанного с ним, среднего ползуна 14 также имеюще- 5 го продольныепазы в для прохода оси И и звездочки 12 и наружного ползуна 15, жестко связанного основанием с рамой 1. Кроме того, наружный ползун 15 кинематически бвязан посредством пальца 16 (узел I) со средним ползуном ю
14. Средний ползун 14 также имеет палец 17 (узел П), в который входит соответствующий паз берхиего полззта 10.
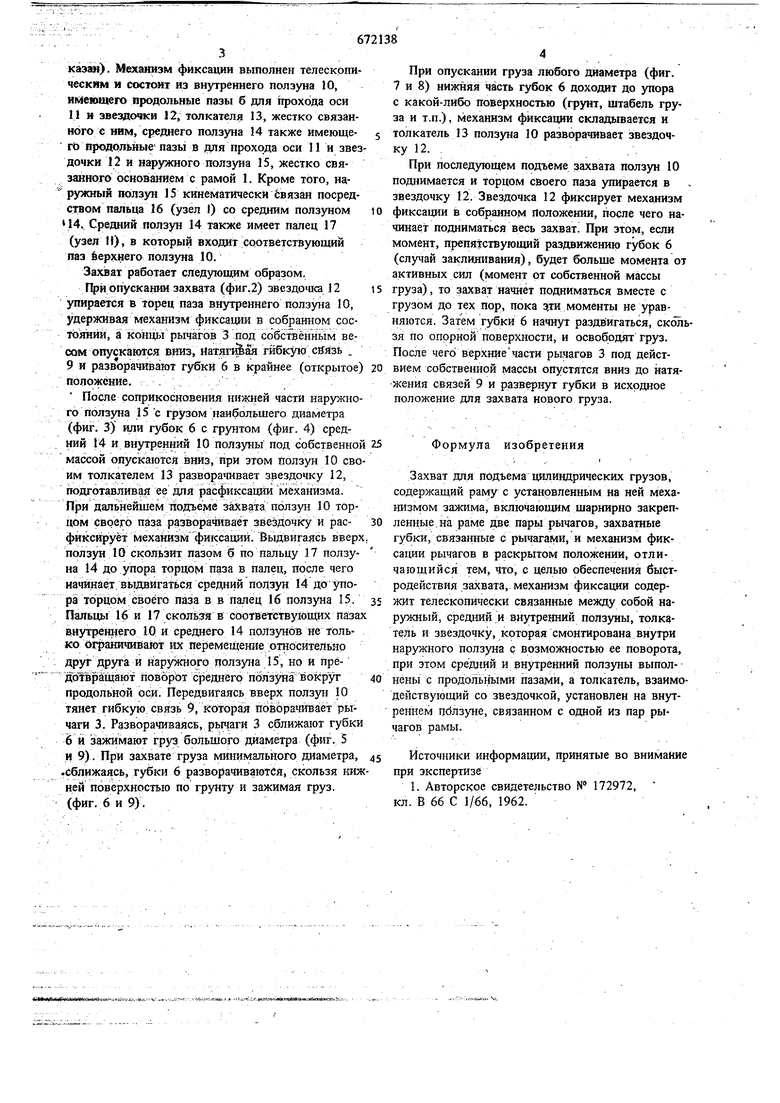
Захват работает следуюидам образом. При опускании захвата (фиг.2) звездочка 12 15 упирается в торец паза внутреннего ползуна 10, удерживая механизм фиксации в собранном состошйи, а концы рычагов 3 под собственным весом опускашся вниз, Натяп ая гибкую сйязь . 9 и разворачивают губки 6 в крайнее (открытое) 20 Положение.
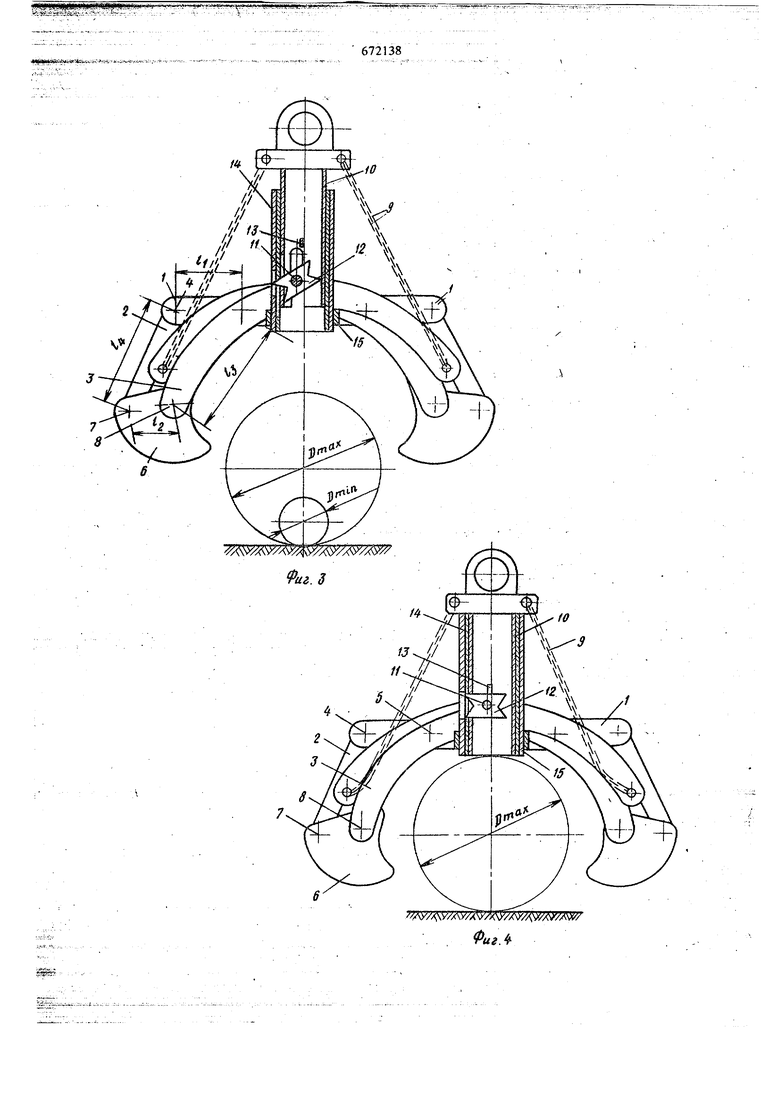
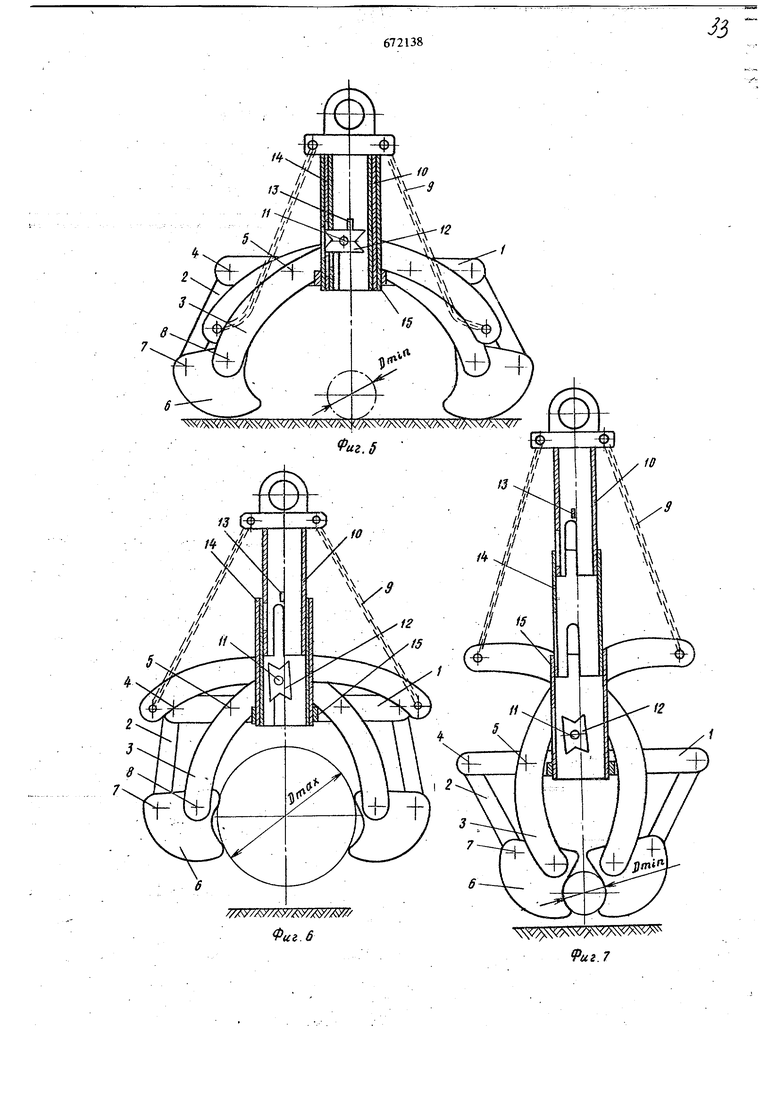
После соприкосновения части наружного ползуна 15 с грузом наибольшего диаметра (фиг. 3) Ш1И губок 6 с грунтом (фиг. 4) средний 14 и внутренний 10 ползуны под собственной 25 массой опускаются вниз, при этом ползун Ш своим толкателем 13 разворачивает звездочку 12, подготавливая ее для расфиксацйи механизма. При дальнейшем/подъеме захвата ползун 10 торцом своего паза разворачивает звездочку и рас- 30 фиксирует механизм фиксаций. Выдвигаясь вверх. ползун 10 скользит пазом б по пальцу 17 ползуна 14 до упора торцом наза в палец, после чего начинает, выдвигаться средний ползун 14 до упора торцом своего паза в в палец 16 ползуна 15. 35 Пальцы 16 и 17 скользя в cooTBetctByiouiHX пазах внутреннего 10 и среднего 14 ползунов не только ограничивает их перемещение относительно друг друга и наружного ползуна 15, но и предотвращают поворот среднего п6лз5 а вокруг 40 продольной оси. Передвигаясь вверх ползутг 10 тянет гибкую связь 9, которая пов&ра мает рычаги 3. Разворачиваясь, рьгчаги 3 сближают губки 6 и зажимают груз, большого диаметра (фиг. 5 и 9). При захвате груза минимального диаметра, 45
сближаясь, губки 6 разворачиваются, скользя гаокней поверхностью по грунту и зажимая груз, (фиг. 6 и 9).
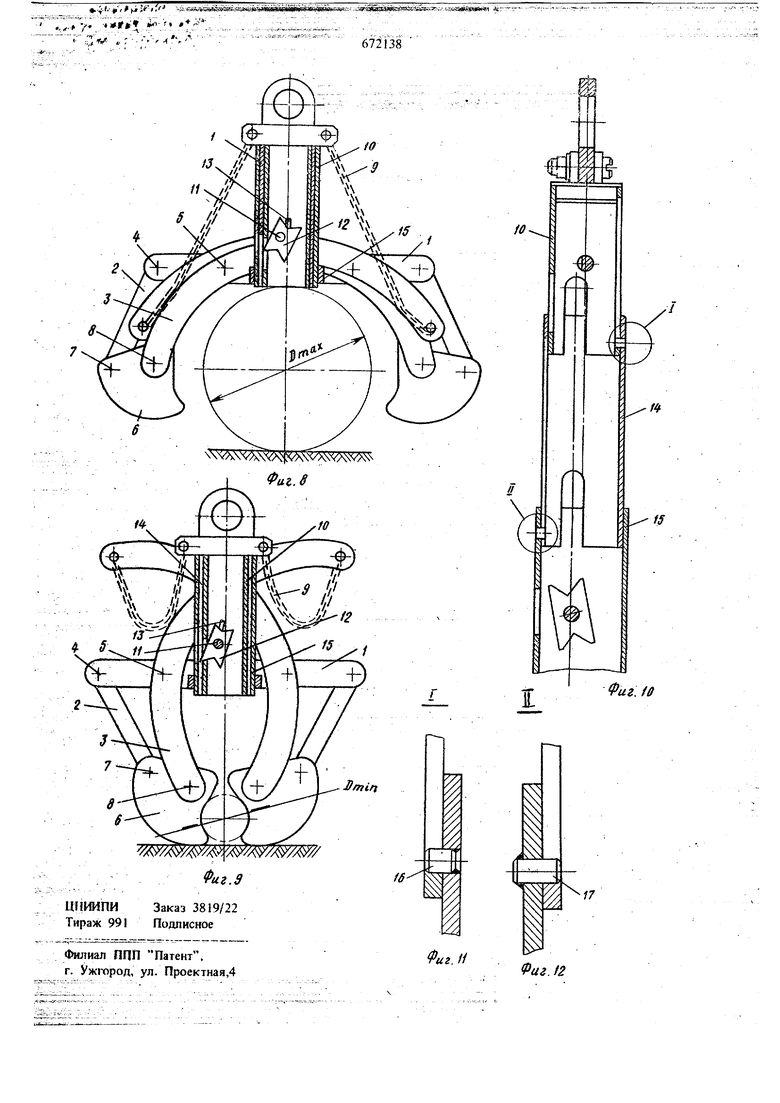
При опускшгаи груза любого диаметра (фиг. 7 и 8) нижняя часть губок 6 доходит до упора с какой-либо поверхностью (грунт, штабель груза и т.п.), механизм фиксации складывается и толкатель 13 ползуна 10 разворачивает звездочку 12.
При последующем подъеме захвата ползун 10 поднимается и торцом своего паза упирается в звездочку 12. Звездочка 12 фиксирует механизм фиксации в собранном Положении, после чего начинает подниматься весь захват При зтом, если момент, п репятствующий раздвижению губок 6 (случай заклинивания), будет больще момента от активных сил (момент от собственной массы груза), то захват начнет подниматься вместе с грузом до тех пор, пока з,ти моменты не зфавняются. Затем губки 6 начнут раздвигаться, сколзя по опорной поверхности, и освободят груз. После чего верхниечасти рычагов 3 под действием собственной массы опустятся вниз до натяжения связей 9 и развернут губки в исходное положение для захвата нового груза.
Формула изобретения
..-.
Захват для подъема вдшиндрических грузов, содержащий раму с установленным на ней механизмом зажима, включающим щарннрно закрепленные, на раме две пары рычагов, захватные губки, связанные с рычагами, и механизм фиксации рычагов в раскрытом положении, отличающийся тем, что, с целью обеспечения быстродействия захвата, механизм фиксации содержит телескопически связанные между собой наружный, средний .и внутренний ползуны, толкатель и звездочку, которая смонтирована внутри наружного ползуна с возможностью ее поворота, при этом средний и внутренний ползуны выполнены с продолыгыми пазами, а толкатель, взаимодействующий со звездочкой, установлен на внутреннем ползуне, связанном с одной из пар рычагов рамы.
Источники информации, принятые во внимани при зкспертизе
1. Авторское свидетельство № 172972, кл. В 66 С 1/66, 1962.
13
иг. /
Фиг. 2
i|nli Bri.;iffli y i
672138
(S//W//M// : y
Фиг. ///()y//fy// / Фиг. 6 x x x WNVA иг.7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое захватное устройство для длинномерных грузов | 1980 |
|
SU901232A1 |
| Грузозахватное устройство | 1990 |
|
SU1798290A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU264650A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Автоматическое захватное устройство | 1982 |
|
SU1030298A1 |
| Автоматическое захватное устройство | 1971 |
|
SU549400A1 |
| Устройство для возведения монолитной ограждающей конструкции ремонтных котлованов на болотах | 1989 |
|
SU1721372A1 |