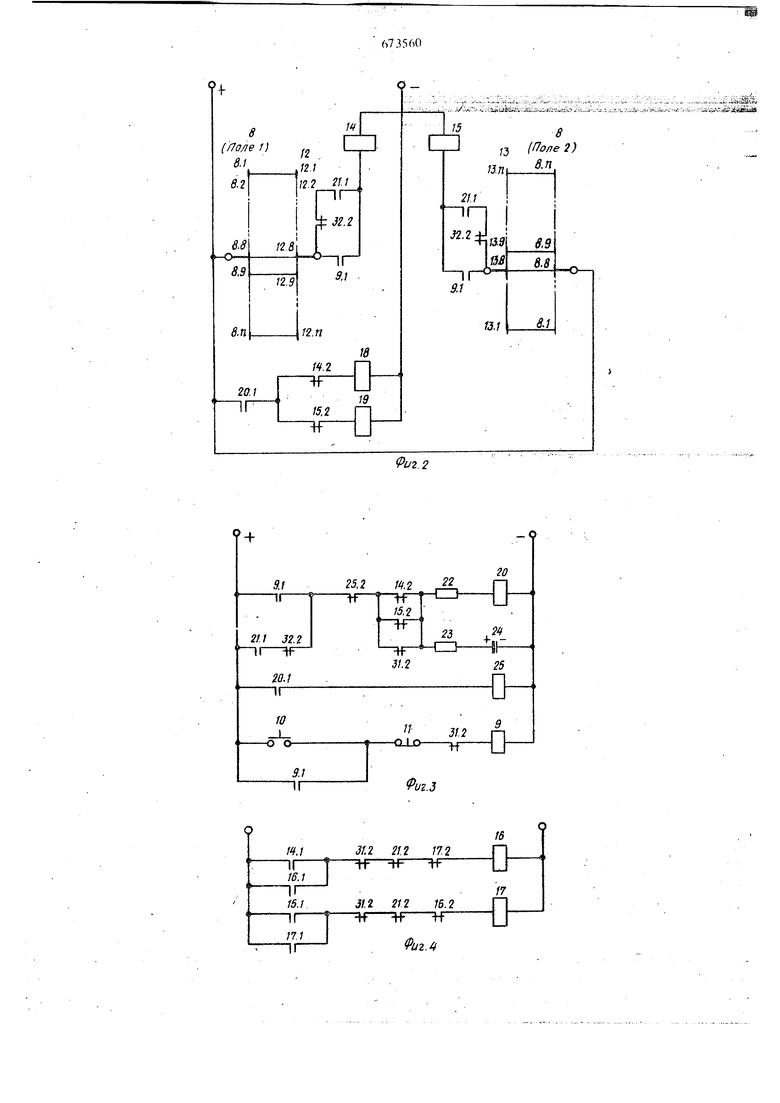
BC) снабжено блоком синхронизации, выполненны из двух реле, в цепь питания обмотки олного из которых включен переключатель режимов работы, а цругого - контакты pejre блока поиска кратчайшего пути, а контакты этих реле соединены последовательно между собой и включены в цепь питания одной из обмоток шагового искателя блока совпадения параллельно датт ику прохождения по/гок. На фиг. 1 изображена блок-схема устройства на фиг. 2 - блок поиска кратчайшего пути; на фиг. 3 - генератор; на фиг. 4 - реверсивный исполнительный блок; на фиг. 5 - при1вод; на фиг. 6 - блок совпадения; на фиг.7 блок синхронизации. Устройство для управления перемещением полок механизированного склада содержит блок 1 ввода программы с многопозиционным переключателем,- блок 2 поиска кратчайшего пути вызываемой полки, генератор 3, реверсивный исполнительный блок 4, блок 5 совпадения, цифровой индикатор 6 и блок 7 синхро HH3aipiH. Блок 1 ввода программы рассредоточен в . остальных блоках и содержит трехсекционный многопозиционный переключатель 8 (фиг. 2 и 6), пусковое реле 9, кнопки 10 Пуск и 11 Стоп.Нормально-открытые (НО) контакты 9.1 реле 9 включены в цепи блока 2 поиска кратчайшего пути (фиг. 2), генератора 3 (фиг. и блока 5 совпадения (фиг. 6). ,.. . Блок 2 поиска кратчайшего пути (фиг. 2) . содержит два шаговых искателя 12 и 13 со встречйым отсчётом, каждый из которых соеди ТКенГёоответственно с реле 14 и 15 включения исполнительного блока 4 (фиг. 4 и 5). НО ко такты 14.1 и 15.1 реле 14 и 15 включены в цёШ ревёрсивного пускателя с катушками. 16 и 17 (фиг. 4) исполнительного блока 4, а их нормально закрытые контакты (НЗ) 14.2 и 15.2 соответственно включены в цепи катушек 18 и 19 шаговых искателей 12 и 13 реле 20 генерато{)а 3 (фиг. 3) и реле 21 блока 7 синхронизации (фиг. 7). Ламели 12.1-12.П и. 13.1-13.п шаговых искателей 12 и 13 соответственно электрически соединены с ламелями 8.1-8.4 двух секций (полей) многосекционного переключателя 8. Блок 2 поиска кратчайшего пути управляет,, ,, ся генератором 3 импульсов (фиг. 3), которы содержит времязаДающую РС-цепь, состоящую из резисторов 22 н 23 н конденсатора 24, и д поочередно включающихся реле 20 и 25. НО контакты 20.1 реле 20 включены в цепи катушек 18 и 19 шаговых искателей 12 и 13, а также в цепь .обмотки 26 блока реверсивного шагового искателя 27 блока. Реверсивный исполнительный блок 4 содержит реверсивный пускатель с катушками 16 и 17 (фиг. 4), главные НО контакты 16.1 и 17.1 которого включены в цепь приводного электродвигателя 28 (фиг. 5). НЗ контакты 16.2 и 17.2 пускателя 16 и 17 служат для взаимной самоблокировки его катушек. Блок 5 совпадения (фиг. 6) выполнен на реверсивном шаговом искателе 27, ламели 27.1-27.П которого соединены соответственно с ламелями 8.1-8.П третьего поля многопозиционного переключателя 8 блока ввода программы. Обмотки реверсивного шагового искателя 26 и 29 соединены между собой параллельно и с помощью НО 16.1 и 17.1 и НЗ 16.2 и 17.2 контактов реверсивного пускателя соответственно блокированы с катушками последнего. А в цепь питания обмоток 26 и 29 включен датчик 30 прохождения полок. НО контакты 16.1, 17.1 и 31.1 пускателей 16 и 17 и реле 31 соединены параллельно между собой и включены последовательно с НО контактами 9.1 реле 9 начала цикла в цепь питания реле 31 отклонения. Целесообразно использовать цифровой индикаторный блок 6 известной конструкции, выполненный, например, на цифровых индикаторных лампах типа ИН1, соединенных с ламелями реверсивного шагового искателя 27 блока 5 совпадения через разделительнь1е диоды (схема не приведена). Для приведения схемы в нормальное исходное сос янйё при переключении с ручного управления на автоматическое, предусмотрен блок 7 синхронизации (фиг. 1), который обеспечивает соответствие между состоянием блоков 2 поиска и 5 совпадения и положением полок склада 6т«осительно раздаточного окна. Блок синхронизации выполнен на двух реле 21 и 32 (4«иг. 7). В цепь питания обмотки реле 32 включен переключатель 33 режимов работы с ручного управления на автоматическое и обратно. В цепь питания реле 21 включены НЗ контакты 14.2 и 15.2 реле 14 и 15 блока поиска кратчайшего пути. НО контакты 21.1 реле 21 и НЗ контакты 32.2 реле 32 (фиг. 6) соединены последовательно между собой и включены в цепь пита1шя обмотки 26 шагового искателя 27 блоКа сОвНадения параллельно датчику 30 прохождения полок. НО контакты 21.1 реле 21 (фиг. 2, 3 и 6), включенные последовательно с НЗ контактами 32.2 реле 32, включень параллельно пусковым НО контактам 9.1 реле 9 блока 2 поиска, в генераторе 3, в цепи обмотки 26 реверсивного шагового искателя и цепи реле блока 5 совпадения соответственно. Кроме того, НЗ контакты 21.2 реле 21 (фиг.4) включёнь последовательно в цепях пускателей 16 и 17 исполнительного блока 4.
Устройство работает слеауклиим образом.
При автоматической работе программа вводится, путем установки рукоятки трехсёкнионнего переключателя 8 на цифру, соответсгвуюшую вызываемой полки, например, на цифру 8. Затем нажимают на кнопку 10 Пуск при этом пусковое реле 9 своими НО контактами 9.1 подготавливает к работе блок 2 поиска кратчайшего пути (фиг. 2) и блок 5 совпадения (фиг. 6) и включает генератор 3 импульсов (фиг. 3). Последний периодически замыкает и размыкает FiO контакты 20.1 реле 20 в цепи катушек 18 и 19 соответственно шаговых искателей 12 и 13, причем каждый импульс перемещает роторы шаговых искателей на один шаг со взаимно встречным отсчетом номеров
ламелей до тех пор, пока один из шаговых искателей, например 12, не достигнет заданной ламели под номером 8 и не замкнет тем самым цепь реле 14 включения исполнительного блока 4. НЗ контакты 14.2 реле 14 отключают при этом питание катушки 18 шагового искателя 12, а НО контакты 14.1 (фиг. 4) включают пускатель 16, последний своими главными контактами (фиг. 5) включает электродвигатель 28 привода, и полки склада приходят в движение, перемещаясь мимо раздаточного окна. Одновременно контакты пускателя подготавливают к работе блок 5 совпадения (фиг. 6), в данном случае обмотку 26 реверсивного шагового искателя 27, а также реле 31 отключения исполнительного блока. Другой шаговый искатель, в данном случае 13, продолжает отсчет также до достижения ламели под номером 8, после чего срабатывает реле 15, которое своими НЗ контактами 15.2 в цепях катушки 19 шагового искателя 13 и реле 20 генератора 3 импульсов (фиг. 3) отключает их, при этом замыкаются также НО контакты 17.1 в цепи пускателя 17 (фиг,4),.но реверса не происходит, так как разомкнут НЗ контакт 16.2 пускателя на катушке 16.
При прохождении каждой полки мимо раздаточного окна датчик 30 прохождения выдает электрический импульс, управляющий реверсивным шаговым искателем 27 блока 5 совпадения (фиг. 6). Датчик 30 периодически включает соответствующую, подготовленную контактами реверсивного пускателя с катушками 16 и 17, обмотку реверсивного шагового искателя в данном случае. При этом ротор шагового искателя с каждым импульсом поворачивается на один шаг до тех пор, пока он не достигнет ламели под номером 8 и не замкнет тем самым цепь реле 31 отключения исполнительного блока 4. НЗ контакты 31.2 (фиг. 4) реле 31 отключают при этом :1ускатель с катушкой 16, а другие его НЗ контакты 31.2 обеспечивают отключение в других блоках.
Против раздаточного окна остановилась вызнанная по программе полка номер 8. На этом никл заканчивается, все блоки подготовлены для выполнения следующей программы, а вдфровой индикатор показывает цифру ,8.
Возможна работа устройства и на ручном управлении. При переходе с ручного у1фавления на автоматическое необходимо привести схему в нормальное исходное состояние, т.е. обеспечить соответствие между состоянием блоков 2 поиска 5 совпадения и положением полок склада относительно раздаточного окна, выражающееся в совпадении номера полки, находящейся против раздаточного окна, с номером подключенных ламелей всех шаговых искателей. Эту функцию выполняет блок 7 синхронизации (фиг. 7).
При необходимости ручного управления перейлючатель 33 устанавливают в положение
Ручн., при этом подключается промежуточное реле 32, которое своими НО контактами 32.1 подключает реле 21, становящееся на самопитание, в результате чего замыкаются НО контакты 2.1 реле 21 в генераторе 3, блока 2
поиска и 5 совпадения, подготавливая их цепи, а НЗ контакты 21.2 реле 21 отключают пусковой блок 4.
При переходе к автоматическому управлению переключатель 8 блока 1 ввода программы
устанавливают на цифру, соответствующую номеру полки, находящейся в данный момент против раздаточного окна, после чего переключатель 33 устанавливают в положение Авт. При этом реле 21 остается под напряжением, а
реле 32 отключается. В результате чего НЗ контактами 32.2 реле 32 включается генератор 3 и подготавливаются цепи реле 14 и 15 блока 2 поиска, а также цепи реле 31 обмотки шагового искателя блока 5 совпадения. При замыкаНИИ контактов 20.1 реле 20 генератора 3 приводятся во вращение роторы всех шаговых искателей, работающих до совпадения каждого из них с положением переключателя 18 блока 1 ввода программы. При установке всех шаговых искателей в заданное положение НЗ контактами 14.2, 15.2, 31.2 отключается генератор 3 и реле 21, и схема готова к автом атической работе.
50
Формула изобретения
1. Устройство для управления перемещением полок механизированного склада, содержащее блок ввода программы с многопозиционным переключателем, блок поиска; кратЧайщего пути, выполненный в виде 5шравляемых генератором I импульсов двух щаговых искателей со встречным отсчетом, каждый из которых соединен
со своим реле 18кЯючения исполнительного блока, реверсивный -исполнительный блок и соединенный с ним блок совпадения и датчик прохождения полок, отличающееся тем, что, с целью улучшения удобств эксплуатации, блок совпадения выполнен на реверсивftoM шаговом искателе, ламели которого соединены с ламелями многопозиционного переключателя блока ввода программы, а его обмотки соединены между собой параллельно и в цепь йГх ГГйТатадйвклшен датчик прохождения полок. 2. Устройство по п. 1, о т л и ч а ю ш е ес я тем, что оно снабжено блоком синхрони аШС вйполненнйм на двух реЛе, в Цепь пи iMMfl-i ii.Ji, тания обмотки одного из которых включен пе8
реключатель режимов работы, а другого - контакты реле блока поиска кратчайшего пути, а контакты этих реле соединены последовательно 1между собой и включены в цепь питания одной из обмоток шагового искателя блока совпадения параллельно датчику прохождения полок.
Источники информации, принятые во внимание при экспертизе
. Авторское свидетельство СССР N 379918, кл, В 65 G 47/50, 1973.
2. Малкович А. Р. Автоматизация установок внутризаводского транспорта. Л., Энергия, 1970, с. 70-73.




Пуск
Стоп
Датчик
- О
il2 гп
ux)
иг.5
О Q О
- 17.1
{6.1
Г
иг.5
