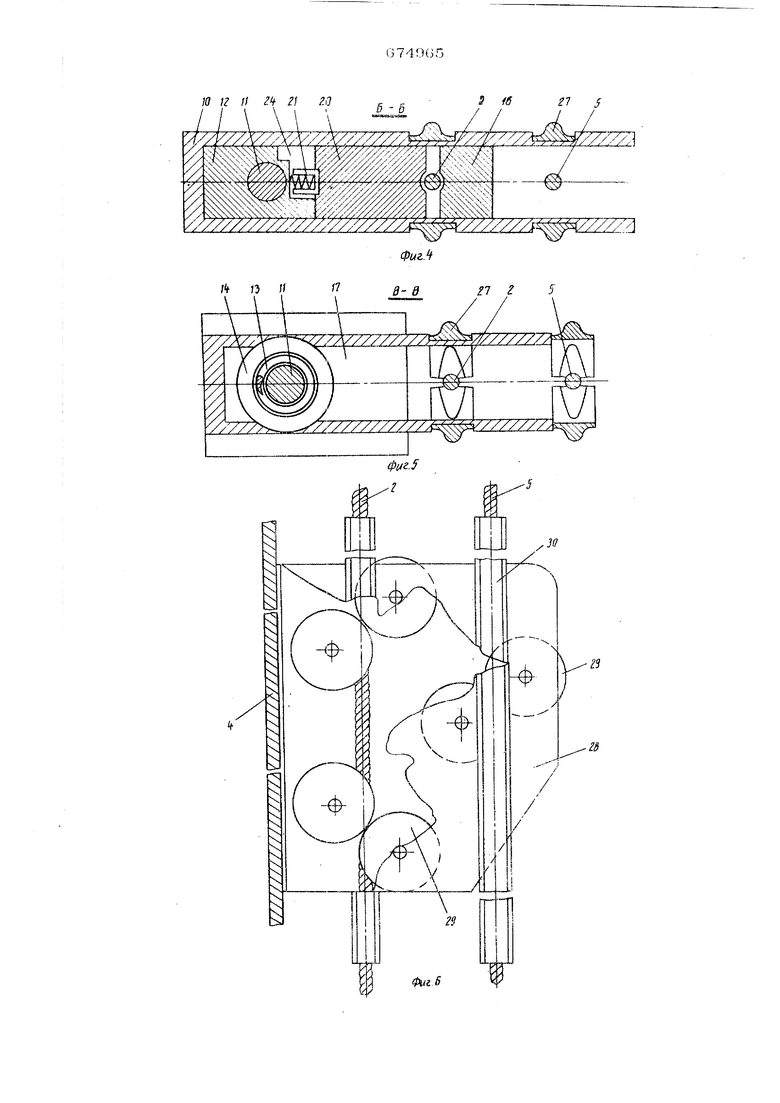
(54) ПОДЪЕМНИК t-fyAH i,ifSj af fK Jy2--f ----c X:-- t -- ---- ir -- -°V-feb«W.- -----rXS-ft.-, ошки, взаимодействующие с направляющим и тяговым канатами. На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 - каретка общий вид; на фиг. 3, 4 и 5 - сечение А-А, Б-Б и В-В на фиг. 2; на фиг, 6 ползун люльки; на фиг, 7 - фиксатор направляющего и тягового канатов, общий вид; на фиг, 8 - узел Г на фиг, 7; на фиг, 9 - сечение ГтГ на фиг. 7, Устройство содержит каре-псу 1, направляющий канат 2, фиксаторы 3, люльки 4 с направляющим ползуном, тяговый канат 5, поворотную крнсоль с блоками 6, отводные блоки 7, лебе; 8 и балластные плиты 9. Каретка 1 с механизмом фиксации люльки содержит корпус 10, подвешиваемый к втулке тягового каната 5, В корпусе каретки установлена тяга 11, которая ввинчивается в толкасрший клин 12, На тяту насаживается рабочая пружина 13, верхним концом упирающаяся в толкающий клин 12, а нижним - в упорную втулку 14, PC нижней части тяги подвеши вается л(опька 4.-/.- :-: ., . К щекам каретки приклепаны направляющие ролшси 15, опорная пята (башма 16, упорная гайка 17 и амортизатор 18 Оси двух направляющих роликов 15 выполнены с овалькьши пазами 19, в кото рые устанавливается зажимной клин 20, который правой стороной подходит к направляющему канату 2, а левой,- к толgaibutewy клину 12, Для повыщения коаффициентё трешя на рабочих поверхностях опорной ПЯТЬ 16 и зажимного клина 20 нанесена насечка. В корпус тояйабэщего клина 12 устан лен подаружиненный ползун 21, верхняй часть которого входит в направляющий паз зажимного клина. Этот паЗ заканчивается стопорной выемкой 22. Для установки ползунй 21 ни предохранитель в за жимном и толкающем клиньях имеются отверстия 23 и 24, для этого же и в ще ке каретки имеется паз 25 (см. фиг, 3 и 4), В пазах 19 зажимного клина 20 установлены подпружиненные скобы 26, К корпусу 10 каретки прикреплены направляющие желоба, 27, Направляющий ползун 4 состоит из корпуса- 28, направляющих роликов 29 и направляющих желобов ЗО, которые /охватывают направляющий и тягоВый канаты. Фиксатор 3 направляющего и тягового канатов состоит из двух консолей 31, шарнирно-соединенных с зажимами 32, подпружиненных плоской пружиной 33, кото рая одним концом жестко скреплена с зажимом 32, а другим - входит в паз консоли 31, Консоли снабжены балансирами 34, которые крепятся к ним посредством вала 35. На вал насажены пружишл 36, которые одним концом Крепятся наглухо к балансиру, а другим - упираются во втулку 37 балансира 34. В щеках балансира установлены направляющие ролики 38, зажимающие направляющий или тяговый канат. Для работы подъемника люлька с монтажниками подвещивается к каретке, ко;торая крепится к одной ветви тягового каната, а другая ветвь тягового каната и направляющий каНат запассовываются . в найравпяющие ролшси кйретки и ползуна. Под действием веса люльки как при ее подъеме, так и при Спуске, тяга 11 с толкающим клином 12 сжимают рабо- (. чую пружину 13. Толкающий клин занимает в каретке нижнее положение, а зажимной клин 20 под действием пружинной скобы 26 отходит от опорной пяты 16 и освобождает направляющий канат 2, Установленные в каретке и ползуне люльки ролики 15, 29 обеспечивают плавное передвижение каретки и люльки по направляющему 0 тяговому канатам. При приближении каретки или люльки к фиксато- . ру 3 (подъем или спуск) установленные на корпусах каретки иди ползуна направляющие желоба 27, 30 давят на направляющие ролики 38, балансиров 34j фиксатор 3, поворачивают балансиры вокруг своей оси, а напрабляющие ролики 38 освобождают ветви направляющих канатов, обкатывают ребордь направляющих желобов и вновь захватывают направляющие канаты. Для постоянного удержания ветвей направляющих канатов в желобах направляющих роликов балансиряг 34 сжимаютт ся в горизонтальной плоскости консолями 31 посредством пружины 33, as вертикальной плоскости пружинами 36, работающими при отклонении балансира от горизонтали. При ослаблении усилия в тяговом канате корпус 10 каре-пси под дейстЬием сипы пружинь 13 скойьзит по толкающему клину 12, а зажимной клин 2О под действием нормальной силы, передающей-, ся от рабочей пружины 13 через толкающий клин 12, прижимает направляющий канат 2 к опорной пяте 16 и фиксирует карет-. ку 1 относительно направляющего каната 2, Начальное напряжение в рабочей пружине 13 (достаточное для создания нормальной силы, способной удержать каретку с люлькой на направляющем кадате) создается упорной втулкой 14, которая ввинчивается 6 упорную гайку 17. При мгновенном обрыве тягового каната 5 происходит сильный удар клина 12, .который упрется в амортизатор 18, а ползун 21 заскочит в стопорную выемку 22 зажимного клина 2О и законтрит зажимной клин относительно упорной пяты. „. Формула изобретения 1. Подъемник, содержащий смонтировацные на. мачте посредством системы блоков направляющий и тяговый канаты, последний из которых взаимосвязан с лебедкой и снабжен люлькой, отличающийся тем, что, с целью пошше;. иия безопасности работы подъемника, люл ка соединена с тяговым канатом посредством каретки, снабженной напрсюляющими роликами, выполненными с оваль ||ыми пазами и взаимодействующими с тягоШм канатом, и м,ехани31;лрм фиксации люльки, содержащим опорную пяту, толкающий клин, смонтированный на подпружиненной тяге, верхний конец которой соединен с тяговым канатом, а нижний с люлькой, и аажимной клин, снабжен1 Ый осями, взаимодействующими с подпружиненными скобами в пазах направляющих роликов, при этом толкающий клин снабжен подпружиненным стопором, взаимодействующим с зажимным клином, выполненным с пазом и выемкой для стопора. 2.Подъемник по п. 1, о т л и ч аю uf и и с я тем, что с целью стабилизации люльки в пространстве, каретка и люлька снабжены ползунами, содержащими корпус, снабжен1а й направляюохими роликами, взаимодействующими с направляющим и тяговым канатами и направляю щими желобами, смонтирсюанюлми на корпусе ползунов параллельно канатам. 3.Покье ншк. по и, 1, о т л и ч аю щ и и с я тем, что, с целью расположения канатов на определенном расстоянии от мачты, на ней смонтированы фиксаторы для канатов, содержащие подпружиненные консоли, снабженные подпружиненными балансирами, одни концы которых закреплены на консолях, а на других смонтированы направляющие ролики, взаимодейсюующИе с направляющим и тяговым канатами. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3797608, кл. 182-112, 1974.
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обслуживания рабочих оттяжек мачт | 1976 |
|
SU919919A1 |
| Устройство для обслуживания труднодоступных участков объектов,установленных в одной плоскости на различных отметках | 1980 |
|
SU937674A1 |
| Устройство для обслуживания рабочих оттяжек мачт | 1978 |
|
SU931903A1 |
| Устройство для подвески и перемещения люльки | 1983 |
|
SU1126675A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Маятниковая подвесная канатная дорога | 1961 |
|
SU142339A1 |
| Устройство для обслуживания рабочихОТТяжЕК МАчТ | 1979 |
|
SU804811A1 |
| Трелевочная каретка подвесной канатной дороги | 1987 |
|
SU1418130A1 |
| Гаситель угонной силы устройств дляОбСлужиВАНия РАбОчиХ ОТТяжЕК МАчТ | 1978 |
|
SU844428A1 |



К-А
IS
ю 12 II гч /f го
У///////////////////////. ///////,: /////
27 5
Фuit
В- вп г 5
16
674965
