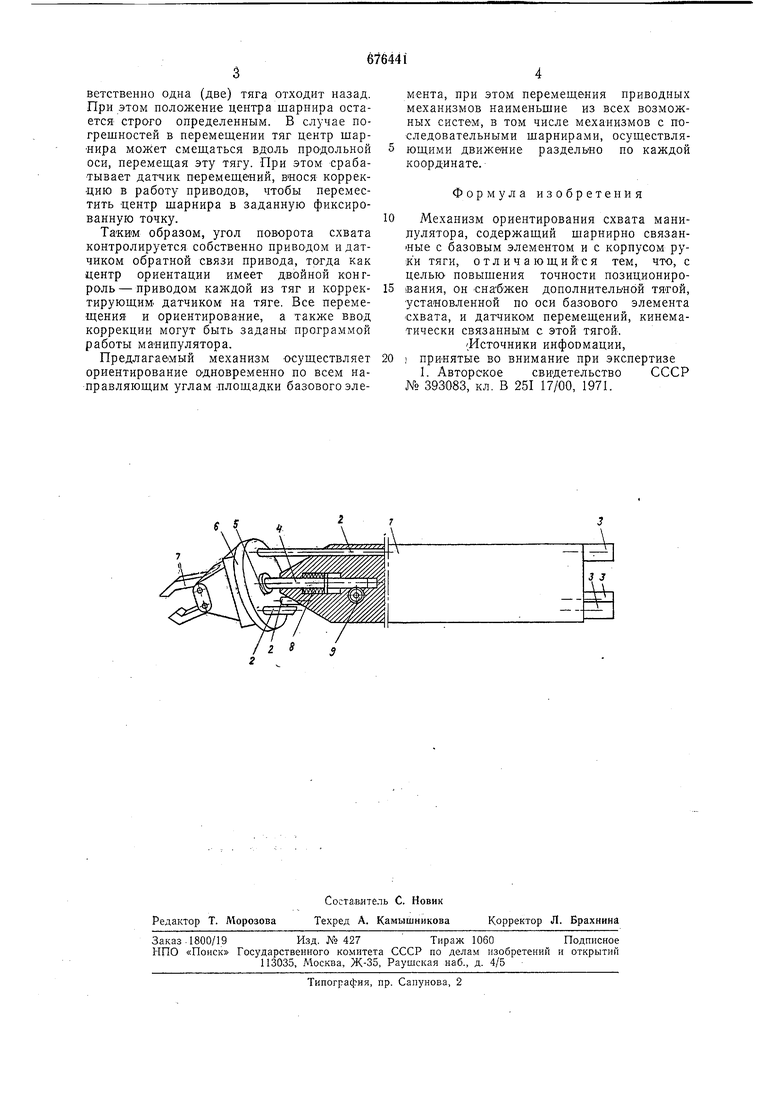
ветственно одна (две) тяга отходит назад. При этом положение центра шарнира остается строго определенным. В случае погрешностей в перемеш,ении тяг центр шарнира может смещаться вдоль продольной оси, перемеш,ая эту тягу. При этом срабатывает датчик Неремеш,ений, внося коррекцию в работу приводов, чтобы переместить -центр шарнира в заданную фиксированную точку.
Таким образом, угол поворота схвата контролируется собственно приводом и датчиком обратной связи привода, тогда как центр ориентации имеет двойной контроль- приводом каждой из тяг и корректируюш,им датчиком на тяге. Все перемещения и ориентирова-ние, а также ввод коррекции могут быть заданы программой работы манипулятора.
Предлагаемый механизм осуществляет ориентирование одновременно по всем направляющим углам Площадки базового элемента, при этом перемещения приводных механизмов наименьшие из всех возможных систем, в том числе механизмов с последовательными шарнирами, осуществляющими движение раздельно по каждой координате.
Формула изобретения
Механизм ориентирования схвата манипулятора, содержащий шарнирно связанные с базовым элементом и с корпусом руки тяги, отличающийся тем, что, с целью повышения точности позиционирования, он -снабжен дополнительной тягой, установленной по оси базового элемента схвата, и датчиком перемещений, кинематически связанным с этой тягой. Источники инфоомации,
1 принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 393083, кл. В 251 17/00, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Устройство для корректировки масс роторов электродвигателей | 1986 |
|
SU1330479A1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Устройство для подачи деталей | 1981 |
|
SU1018763A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ СХВАТА МАНИПУЛЯТОРА | 2004 |
|
RU2288092C2 |
| Устройство для ориентирования изделий | 1982 |
|
SU1121207A1 |
| Устройство для шагового перемещения деталей | 1980 |
|
SU984586A1 |
f
