(54) РАБОЧЕЕ ОБОРУДОВАНИЕ ПОГРУЗЧИКА-МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| Манипулятор | 1984 |
|
SU1255553A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| Захватное устройство | 1988 |
|
SU1632777A1 |
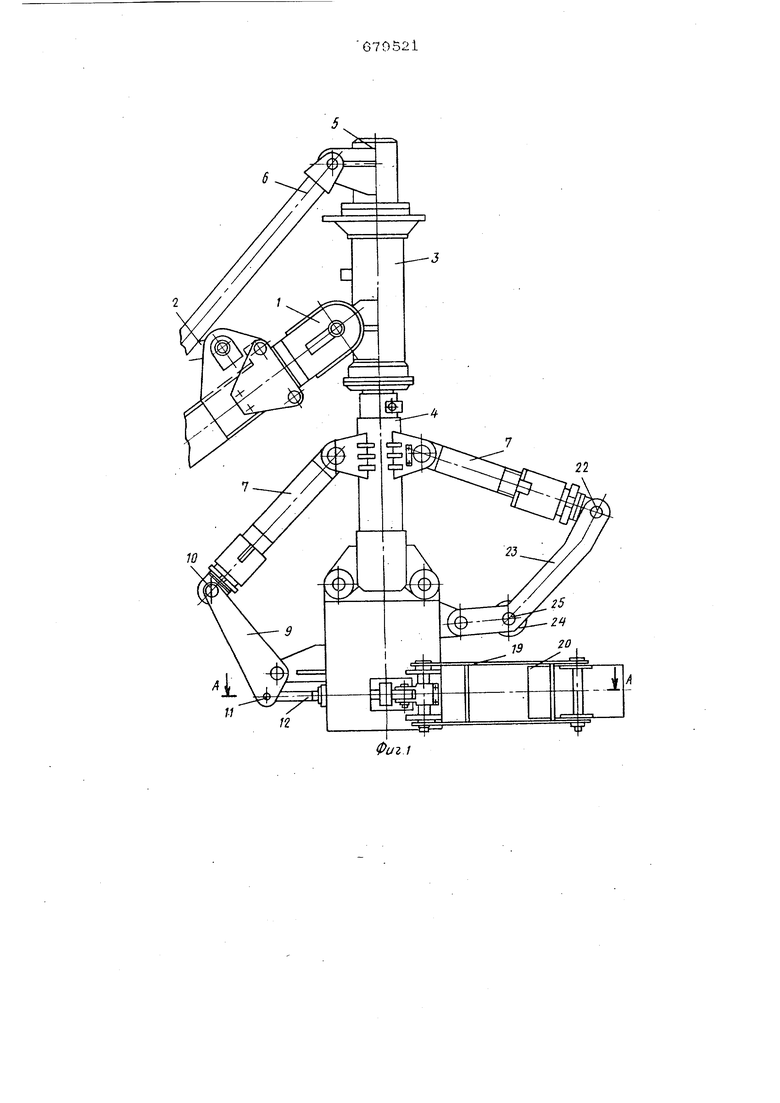
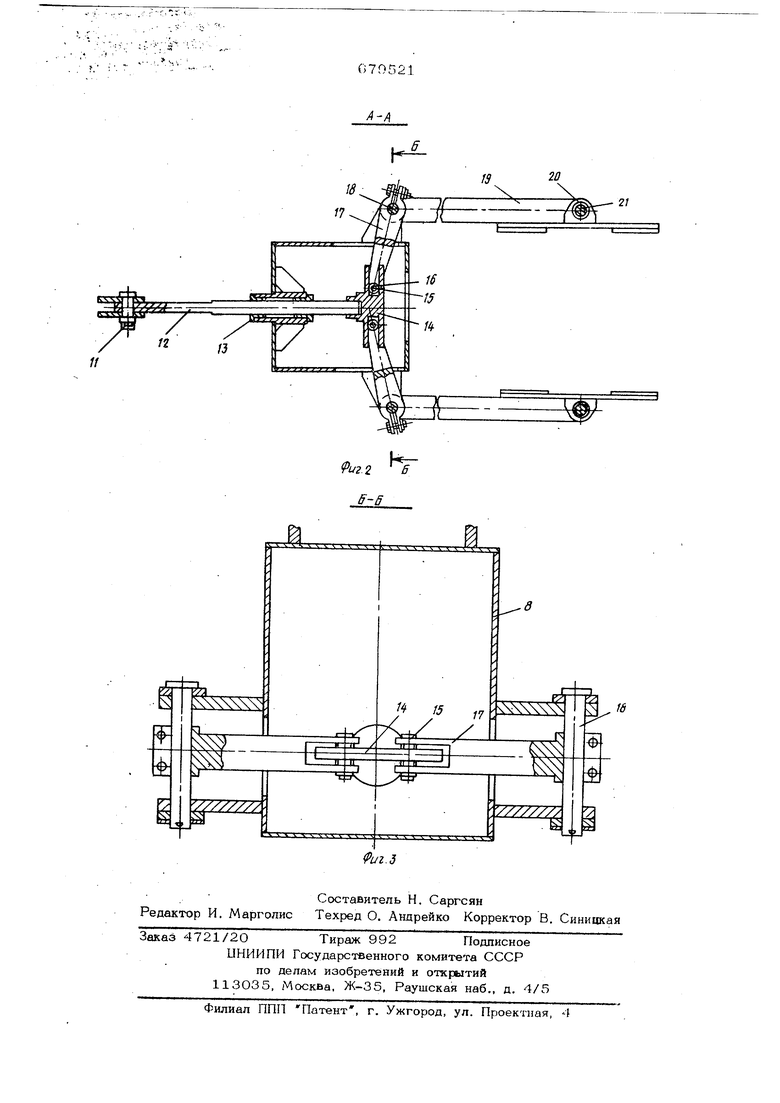
Изобретение относится к подъемнотранспортному оборудованию, в частности для транспортировки и укладки, например бетонных многоканальных блоков. Известно рабочее оборудование погрузчика-ма шпулятора, содержащее стрелу, рукоять с подвижной и неподвижной частя ми, механизм поворота подвижной части рукояти, на противоположных сторонах которой установлены силовые цилиндры управления, и захватные элементы ll. Известное устройство не может обеспечить захват, транспортировку и укладку в штабель или ниже уровня стоянки базовой машины. Цель изобретения - расширение технологических возможностей. Цель достигается тем, что на свободном конце подвижной части рукояш в пре лагаемом оборудовании смонтирован кор пус, внутри которого подвижно установлена горизонтальная тяга, одним концом сое диненная со штоком одного силового цилиндра управлен 1Я посредством рычага. а другим связанная с захватными элементами посредством водила и дополнительных рычагов, при этом к корпусу шарнирно прикреплен кронштейн, снабженный прижимным роликом и соединенный со штоком второго силового цилиндра управления. На фиг. 1 показано рабочее оборудование погрузчика-манипулятора, общий вид; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 разрез Б-Б фиг. 2. Устройство содержит стрелу 1 с rwitроцилиндром 2 подъема стрелы и рукоять, состоящую из неподвижной 3 и подвижной 4 частей. Стрела 1 крепится к неподвижной 3 части рукояти. Подвижная 4 часть рукояти приводится в движение посредством механизма 5 поворота и гидропилиндра 6, при этом на ее противоположных сторонах установлено два силовых цилиндра 7, а в ее нижней части смонтирован кропус 8. Шток первого силового цилиндра 7 управления посредством рычага Г и осей 1.0 и 11 соединен с горизонтально расположенной тягой 12. Эта тяга размещена во втулках 13, установленных внутри корпуса 8, и. жестк соединена с водилом 14, имеющим два противоположно расположенных паза, внут ри которых размещены оси 1 5 со втулками 16, закрепленные внутри допотштельных г5ычагов 17. Противоположные конисы дополнительных рычагов 17 снабжены клещевинами, с помощью которых и осей 18 осуществляется их соединение с до- полнительными рычагами 19. Связь этих рычагов с захватными элементами 20 осуществляется посредством осей 21. Вто рой силовой шшиндр 7 управления посредством оси 22 соединен с кронштейном 23 снабженным прижимным pontncoM 24, установленным на оси 25. Рабочее оборудование погрузчика-мани пулятора устанавливают возлебетонного блока, предназначенного к транспортировке, С помощью гидроцилиндра 2 стрелу 1 переводят из транспортного положения в рабочее. Гидроцилиндром 6 устанавливают неподвижную-часть 3 рукояти в рабочее поло кение. Посредством механизма 5 поворота в направлении бетонного блок ориентируют подвижную часть -4 рукояти ( с захватными элементами 2О. Для захвата бетонного блока включают силовые цилиндры управления. Шток первого цилиндр 7 управления через ось 10 воздействует на рычаг 9 и через него на тягу 12. Вместе с водилом 14 тяга 12 перемещается вперед, толкая при этом втулку 16 и оси 15. Перемещаясь в пазах водила, ось 15 поворачивает дополнительные рычаги 17 и 19. При этом захватные элементы .20 отходят в сторону. Одновремен но шток второго цилиндра 7 управления через ось 21 воздействует на кронштейн 23 и вместе с роликом 24 опускает его вниз. Рабочее оборудование погрузчикаманипулятора подготцвлено для захвата бетонного блока. При захвате блока гидроцилиндром 6 зазшатные клещевины подводят к блоку. При этом- ролик 24 входит в соприкосновение с блоко.м и ориентирует движение захватов. При Включении в работу гидроцилиндров 7 управления в исходное положение возвращаются рычаг 9 и тяга 12. Водила 14 с помощью оси 15 и втулки 16 поворачивают дополнительные рычаги 17 и 19 и прижимают захватные элементы 20 к блоку. Одновременно поднимается вверх кронштейн 23, отводя от блока ролик 24. Блок обжат захватными элементами и подготовлен к транспортировке и укладке блока в щтабель или ниже уровня стоянки погрузчика-манипулятора. Для этой цели используются стрела 1, гидроцилиндр 2 стрелы, неподвижная часть 3 рукояти, подвижная часть 4 рукояти и механизм 5 поворота. Последовательность работы погрузчика-ма1шпулятора при освобождении блока такая же, как и при подготовке к работе. Формула изобретения Рабочее оборудование погрузчика-манипулятора, содержащее стрелу, рукоять с подвижной и неподвижной частями, механизм поворота подвижной части рукояти, на противоположных сторонах которой установлены силовые цилиндры управления, и захватные элементы, о т л и ч а ющ е е с я тем, что, с цельЕ расщирения технологических возможностей, на свободном конце подвижной части рукояти смонтирован корпус, внутри которого подвижно установлена горизонтальная тяга, одним концом соединенная со штоком одного силового цилиндра управления посредством рычага, а другим связанная с захватными элементами посредством водила и дополнительных радчагов, при этом к корпусу шарнирно прикреплен кронштейн, снабженный прижимным роликом и соединенный со щтоком второго силового цилиндра управления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство (.ССР N 251473,Kn.E 02 F, 1968 (щютотип).
