Изобрег.ение отнсюится к вспомогательным устройствам металлорежущих станков, предназначенным апя автома- этической установки или удаления инструментов, преимущественно, к устройствам для автоматической смены инструментов в многооперационных фреаеро-расточных станках с .ЧПУ. Известно устройство для автоматической смены инструмента, в котором осевое и вращательное перемещение механической руки происходит от одного приво- да И Это устройство имеет сложные кинем тические цепи и конструкцию. В связи с тем, что механическая рука выполняет повороты и осевые перемещения от одного штока гидроцилиндра, непрерывно перемещающегося в осевом направлении, то при переходе от одного вида движения к другому (при входе роликов из продольных пазов в кольцевые проточки, и обратно) механическая рука совершает два вида движений одновременно ( т. е. сложное движение). Это не позволяет обеспечить точную (без зазоров) фиксацию механической руки в кольцевых проточках инструмента при его захвате, что снижает надежность устройства в работе. Кроме того, после окончания цикла смены инструмента требуется дополнительное движение штока гидроцилиндра для установки барабанного кулачка в исходное положенсе, что вызывает потерю времени и усложняет управление. Еще одним существенным недостатком указанных выще устройств является малая скорость перемещения механической руки (недостаточное быстродействие) из-за наличия гидропривода и сложных кинематических цепей. Цель изобретения - повыщение надежности устройства в работе и стродействия. Достигается она тем, что приводной вал выполнен составным иэ двух частей, соединенных между собой с возможностью совместного вращения и осевого перемещения одной части относительно другой. Часть вала, несущая рычаг смены инстру мента, избирательно связана с шестерней посредством резьбового соединения и одной электромагнитной муфты, а другая часть - с корпусом через другую эяектромагнитную муфту. Обе части приводного вала соединены шлицевым 1соединением. Это позволяет упростить компоновку и кинематическую цепь устройства при одновременном повышении технологичности его конструкции, а также повысить .быстродействие механической руки. На фиг. 1 изображено описываемое устройство, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид по стрел ке Б на фиг. 1. В корпусе 1 устройства смонтированы шестерня 2 привода (не показанного на чертеже ) и приводной вал, выполненный составным из частей 3 и 4, соединенных между собой с возможностью совместного вращения и осевого перемещения части 3. Части 3 и 4 соединены, например, шлицевым соединением, шлицевой участ- ток 5 которого выполнен на части 4 вала, а шлицерое отверстие (с целью повышения технологичности конструкции) во втулке 6, жестко установленной в тбрцовой расточке 7 части 3. Часть 3 вала опирается на .вращающиеся вместе с ним шлицевые втулки 8, 9 и неподвижную втулку Юс возможностью осевого перемещения. Часть 3 вала несет рычаг смены инструмента, (механическую руку) 11 и избирательно связана с шестерней 2 посредством резьбового соединения и электромагнитной фрикционной муфты (муф ты поворота), состоящей из полумуфты 12, установленной на шлицевом участке 13 час ти 3 вала, и полумуфты 14, жестко связанной с шестерней 2. Резьбовое соединение части 3 с шестерней 2 образовано резьбовыми участками 15 части 3 вала и резьбовым отверстием 16 шестерни 2. Часть 4 вала связана с корпусом 1. через другую электромагнитную фрикционную муфту (муфту осевого перемещения полумуфта 17 которой посажена на шли- цевой участок 5, а полумуфта 18 жестко связана с корпусом 1. На корпусе 1 неподвижно установлены путевые выключатели 19 - 23 и концевой упор 24. На шлицевой втулке 8 закрепдены лепестки 25, 26 (фиг. 2), входящие в прорезь выключателя 19,. контролирующего поворот руки, и выполнены пазы 27, 28, взаимодействующие с выключателем 20 (вводящим замедление при повороте руки), установленным под угломоС к плоскости установки выключатели 19. Время работы привода на замедленном вращении регулируется угпом. Резьбовое отверстие 16 и торцовая расточка .7 выполнены на длину, не меньшую величины Е осевого перемещения руки 11. Длину осевого перемещения Е руки 11 контролируют выключатели 21, 22. Выключатель 21 взаимодействует с шейкой 29 части 3 вала и кольцевой проточкой ЗО, а выключатель 22 - с кольцевой проточкой 31 и шейкой 29. Исходное (и конечное) положение руки 11 контролирует выключатель 23 (фиг. 3), а ограничивает ход руки - концевой упор 24. Часть 4 вала, шестерня 2, полумуфта 12 и втулки 8, 9 установлены без возможности осевого перемещения. Механическая рука 11 переносит инструмент из инструментального магазина в шпиндель и из шпинделя в инструментальный магазин (на чертеже не показаны). Цикл смены инструмента состоит из следующих последовательных движений механической руки 11: поворота на 9О из нейтрального положения в положение одновременного захвата инструмента из шпинделя и магазина - осевого перемещения вперед на величину , необходимую для извлечения инструмента из магазина и шпинделя станка, поворота на 18О осевого перемещения назад на величину, необходимую для вставки инструмента в шпиндель станка и магазин, поворота на 90 в обратном направлении до нейтрального положения. Указанная последовательность действия механической руки 11 обеспечивается согласованным включением - выключением полумуфт 12, 14, 17, 18 и реверсированием привода (не показанного на чертеже), взаимодействующего с шестерней 2. Устройство работает следующим образом. Из системы программного управления станком в виде импульса подается команда на автоматическую смену инструмента и шестерня 2 (фиг. 1) начинает вращаться в соответствующем направле-) НИИ. Одновременно включается муфта 12, 14 поворота. Последняя жестко свя- ibiBQGT чаЬть 3 вала с шестерней 2 при юда, поэтому приводной вал 3, 4 и за- :,репленная на нем рука 11 начнут вралатьсяВперед (например, по часовой стрелке, фиг. 2, 3). При повороте на 90 - ( ( - угол замедления) от паза 27 (фиг. 2) срабатывает выключател 20 и остается включенным в пределах угла ok (этому соответствует профиль паза 27). При этом привод переводится на малую скорость вращения. При повороте на 90 лепесток 26 (фиг, 2) входит в прорезь выключателя 19 и включает его. При этом отключаю муфту 12, 14 и включают муфту 17, 1 осевого перемещения. Муфты 17, 18 жестко связывают часть 4 вала с корпу сом 1 (фиг, 1). вращательное движение вала 3,. 4 будет запрещено. С момента выключения муфты 12, 1 щестерня 2 резьбовым отверстием 16 начнет взаимодействовать с приводным валом через резьбовой участок 15, а т, к, вращение части 4 вала запрещено включенной муфтой 17, 18, то часть 3 приводного вала и закрепленная на ней рука 11 начнут перемещаться в осевом направлении (навстречу стрелке Б), При этом часть 3 вала скользит по шлицевому участку 5 части 4 вала, втулкам 8, 9, 10 и полумуфте 12. При перемещении руки 11 и части 3 вала на длину В шток выключателя 21 входит в кольцевую проточку 30 вала, при этом отключается привод Вперед и муфта 17, 18 и одновременно включа ется муфта 12, 14. Начинается вращение руки в выдвинутом состоянии. При повороте на 27О - ck от паза 28 описанным выше способом в цепь привода вдодится замедление. При повороте на 270 выключатель 19 отключает привод Вперед и включает своим размыкающим контактом привод Назад. Одновременно включается муфта 17, 18 и начинается осевое перемещение руки 11 в обратном направлении (по стрелке Б), В конечной точке осевого перемещения руки шток выключателя 22 входит в кольцевую проточку 31 и выключатель срабатывает переведя привод Назад. Муфта 17, 18 при этом отклю чена, а муфта 12, 14 - включена. Начи нается вращение руки в обратном направ лении. На этом этапе движения замедле ние в цепь пщшода пе вводится, т, к. устройство снабжено пружинящим KOIUJCвым упором 24. Opv повороте руки 11 на угол 270 9О° срабатывает выключатель 23.Привод Назад и муфта 12, 14 будут отключены. Устройство находится в исходном состоянии для выпапнения очередного цикла работы. Приводной вал при этом повернут на 180 по отношению к его положению в начале первого цикла. Следующий цикл работы устройства аналогичен описанному. Применение электромагнитнь х муфт исключает возможность выхода из строя (поломок) элементов устройства и привода в случае отказа путевых выключателей и связанного с этим нарушения последовательности движения приводного вала, т. к, при перегрузках фрикционные диски муфт начинают проскальзывать. Возмож ность проскальзьюания дисков-муфт при перегрузках обеспечивает также необходимую гибкость при захвате инструмен тов. Все это повышает надежность работы устройства. Формула изобретения 1.Устройство для автоматической смены и;струмента, содержащее смонтированный Б корпусе рычаг смены инструмента, закрепленный на конце прт водно го вала и установленный с возможностью поворота и осевого перемещения от одного привода, отли.ча ющеес я тем, что, с целью повышения надежности в работе и быстродействия, приводной вал выполнен составным из двух частей, соединенных ме/лцу собой с возможностью совместного вращения и осевого перемещения одной части относительно другой, причем часть вг/ла, несущая рычаг смены инструмента, связана избирательно с прртводной шестерней посредством резьбового соединения и электромагнитной муфты, а другая - с корпусом устройства через дополнительную электромагнитную . 2.Устройство по п. 1, отличающееся тем, что обе части приводного вала соединены между собой шлицевым соединением. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетольство № 382498, кл. В 23 а П/155, 1971. И If f а а
| название | год | авторы | номер документа |
|---|---|---|---|
| Многооперационный станок с автоматической сменой инструмента | 1983 |
|
SU1133799A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Токарный многооперационный автомат продольного точения с числовым программным управлением | 1979 |
|
SU917921A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU733961A1 |
| Стенд для сборки и разборки прокатных валков | 1981 |
|
SU1186300A1 |
| Двухзахватная механическая рука | 1977 |
|
SU659357A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
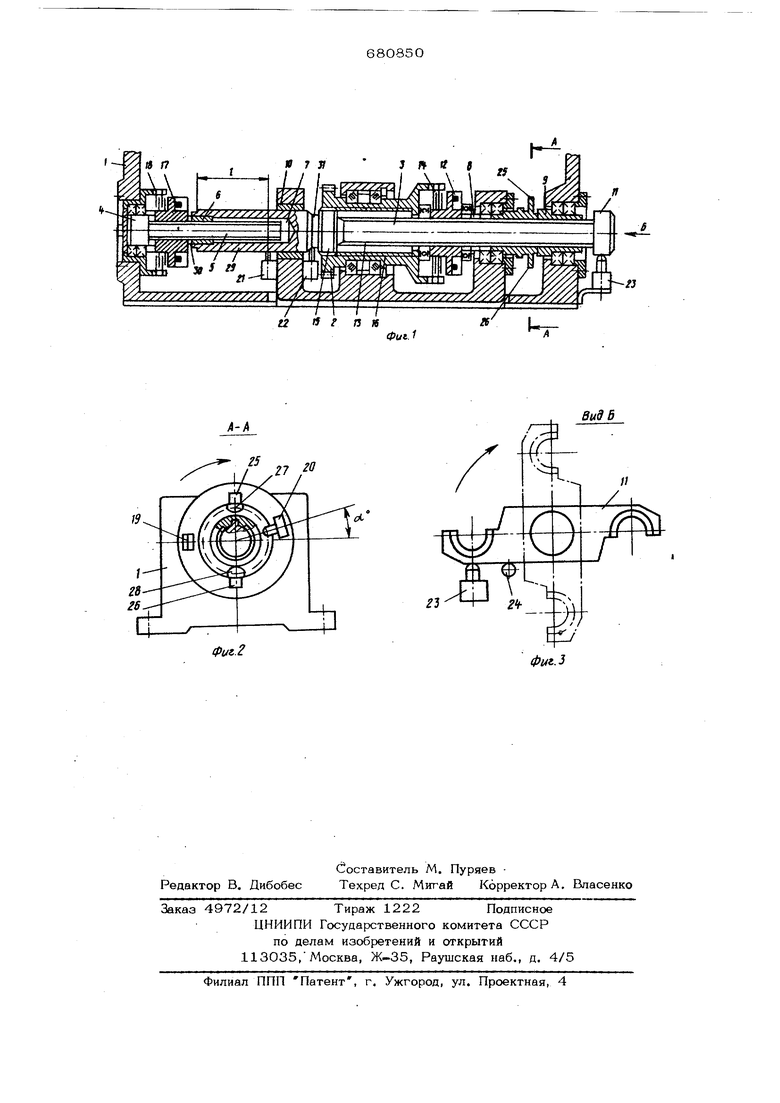
А-А
27 го
Фиг.2
вид В
фut.3
