(54) КЛЕЩЕВОЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм фиксации захватного устройства | 1983 |
|
SU1105439A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захват для грузов с цапфами | 1978 |
|
SU740683A1 |
| Клещевой захват | 1980 |
|
SU910525A1 |
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Крановый захват | 1973 |
|
SU537019A1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| Захватное устройство | 1988 |
|
SU1588684A1 |
Изобретение относится к подъемнотранспортному оборудованию, в частности, к грузозахватным механизмам.
Известны клещевые захваты, навешиваемые на грузоподъемный механизм фиксируемые в раскрытом положении выдвижным упором 1.
Однако такие захваты не могут быть применены для захвата грузов различных размеров.
Наиболее близким из известных технических решений является клещевой захват, навешиваемый на грузоподъемный механизм с помосцью скобы и содержащий захватные рычаги и устройство для фиксации рычагов в раскрытом положении 2 .
Однако такой захват не обеспечивает фиксаций рычагов в различном положении при подъеме грузов различных размеров.
Целью изобретения является фиксация рычагов в различном положении при подъеме грузов различных размеров.
Поставленная цель достигается тем, что устройство для фиксации содержит корпус, соединенный со скобой, снабженный вырезами, расположенными друг под другсм, перекрываемыми поворотными пластинами, закрепленными на корпусе и связанными между собой тягами, палец, закрепленный на одном из захватных рычагов, штоки с кулачками, казвдый из которых жестко закреплен на соответствующей пластине, и направляющие, в которых шарнирно закреплены копиры, взаимо0действующие с кулачками штоков.
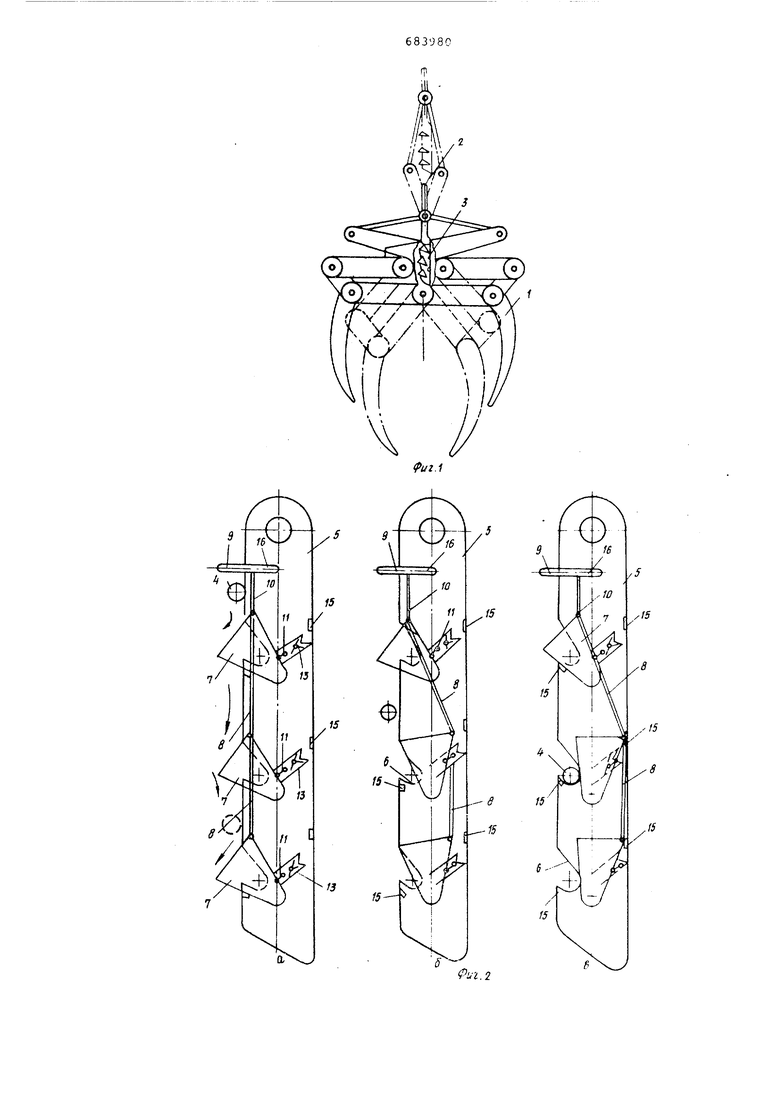
На фиг. 1 показан общий вид клещевого захвата.
На фиг. 2 (а, б, в) изображено устройство для фиксации рычагов.
5
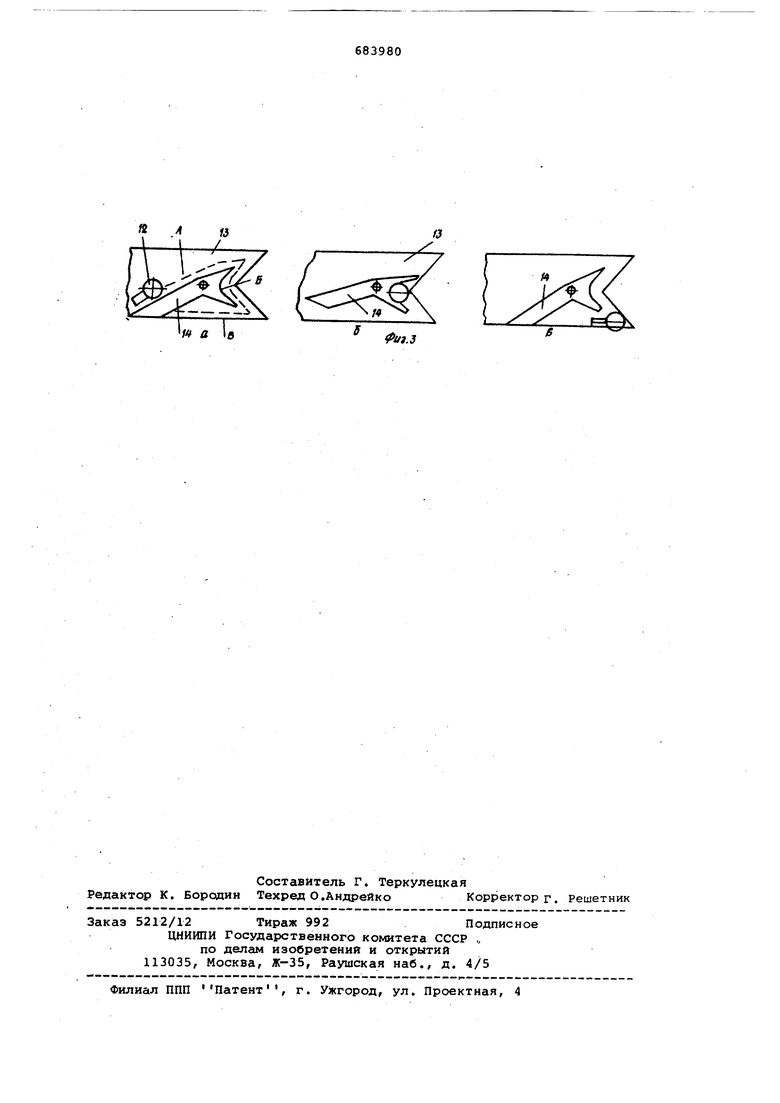
На фиг. 3 (а, б, в) показана направляющая с копиром в трех различных положениях.
Клещевой захват состоит из захватных рычагов 1, навешиваемых на гру0зоподъемный механизм при помощи скобы 2 , и устройства 3 для фиксации рычагов. На одном из захватных рычагов установлен палец 4, взаимодействующий с устройством 3 для фиксации.
5
Устройство 3 для фиксации рычагов содержит корпус 5, присоединенный к скобе 2, с вырезами 6, в которые заходит палец. В корпусе 5 установ лены поворотные пластины 7, перекры вающие вырезы б. Пластины 7 соединены между собой тягами 8, при этсм верхняя пластина связана с конечным упором 9 тягой 10. К пластинам 7 жестко прикреплены штоки 11, на концах которых установ лены кулачки 12, расположенные в направляющих 13 и взаимодействующие с копирами 14. В корпусе также установлены огра ничители 15 поворота пластин 7, Клещевой згисват работает следующим образом. Расположение пальца 4 в одном из трех вырезов 6 корпуса 5 будет соот ветствовать определенному размеру захватываемого груза. При движении пальца 4 вниз относительно корпуса 5 (фиг. 2, а) палец не входит ни в один из вырезов 6, так как они пере крыты пластинами 7, а при обратном направлении движения {фиг. 2,6) палец 4 воздействует на пластины 7 и поднимает их, которые, в свою оче редь, передвигают штоки 1.1, а кулач ки 12 перемещаются по участку А (фиг. За) направляющих 13 до перехо да их на участок Б (фиг, 3, б). При проходе одного из вырезов пластина 7 остается зафиксированной в промежуточном положении и часть выреза остается открытой (фиг. 2, б) , так как кулачок 12 перешел на участок Б (фиг. 3, б). При изменении направления движения пальца 4 он входит в один из вырезов корпуса 5 (фиг. 2, в и продолжает поворот пластины 7, а кулачок 12 переходит с участка Б на участок В. (фиг. 3, в), при этом копир 14 поворачивается и перекрывает участок Б (фиг. 3, в). В свою очередь тяга 8 передвигает и ранее пройденную пальцем 4 пластину 7, получившую промежуточную фиксацию относительно крюкообразного 804 выроза и она принимает положение, аналогичное предыдущей. При выходе пальца 4 из выреза пластины 7 перекрывают их,- кулачок 12 поднимает копир Г4 направляющей и переходит на участок А (фиг. 3,а) Пальцу 4 представляется возможность движения в обратном направлении (фиг. 2, а). При проходе пальца 4 через все положения он доходит до конечного упора 9, который, поворачиваясь на оси 16, переводит все пластины 7 на закрывание вырезов. Формула изобретения Клещевой захват, навешиваемый на грузоподъемный механизм с помощью скобы и содержащий захватные рычаги и устройство для фиксации рычагов в раскрытом положении, о т л и ч а ю щ и и с я тем, что, с целью фиксации рычагов в различном положении при подъеме грузов различHfcjx размеров, устройство для фиксации содержит корпус, соединенный со скобой, снабженный вырезами, расположенными друг под другом, перекрываемыми поворотными пластинами, закрепленными на корпусе и связанными между собой тягами, палец, закрепленный на одном из захватных рычагов, штоки с кулачками, каждый из которых жестко закреплен на соответствующей пластине и направляющие, в которых шарнирно закреплены копиры, взаимодействующие с кулачками шт ок ов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 136873, кл. В 66 С 1/42, 1959. 2. Авторское свидетельство СССР W 110904, кл. В 66 С 1/42, 1957 (прототип).
/ rV/ Ж .Лл
16
/
W
/5
)
/
13
/5
L/
15
/I
/5
О,
у / V . У / А ,
15
.У
.2
f
ог.з
