1
Устройетво для управления транеиортными средствами относится к системам управления движения транспортных средств и может быть использовано на транспорте во всех отраслях народного хозяйства.
Известны следящие системы для транспортных средств 1, у которых в качестве ориентира для каждого направления служат несколько кабелей, уложенных вдоль каждой трассы движения. Причем все кабели питаются токами разной звуковой частоты, а переход с одной трассы на трассу другого направления осуш;ествляется перестройкой датчиков на частоту требуемой трассы, в качестве датчиков используются индуктивные датчики, укрепленные на рулевом колесе транспортного средства.
Наиболее близким техническим решением к данному является устройство для управления транспортными средствами 2, содержащее преобразователь, генератор, серводвигатель, программный блок и датчик, индуктивно связанный с токонесущим проводом, уложенным вдоль путп следования транспортного средства. Выбор нужного направления движения в данном устройстве основан на принципе подачп тока в трассу нужного направления и отключения трассы ненужного направления. Обесточиванне трассы нежелаемого направления осуществляется коммутирующими чувствительнымиэлементами - модулями, вмонтированными в пол в местах ответвлений. Чувствительные элементы получают команды, которые в соответствии с направлением движения поступают с программного блока, установленного на транспортном средстве. В месте каждого ответвления устанавливается не менее трех модулей, а представляет собой сложную цепь прямых н обратных ветвей. При установке в полу большого числа коммутирующих элементов (их число возрастает с усложнением трассы) и усложнении трассы в местах ответвлений возрастает вероятность ощибок при выборе нужного направления движення транспортного средства, т. е. пронсходнт понижение надежности следящей системы.
К недостаткам известных устройств относится то, что прп Cv oжнoй трассе количество кабелей значительно увеличивается и вся система чрезвычайно усложняется, что ведет к снижению надежности управления движением.
Целью изобретения является упрощение устройства и повыщение его надел ности.
Указанная цель достигается за счет того, что в устройство введены два ключа, коммутирующий элемент, выполненный в виде
постоянного магнита, и экранирующий элемент, выиолненный в виде металлической пластины, первый ключ индуктивно связан с постоянным магнитом, размеш,еииым в месте ветвления токонесущего провода, над которым размещена металлическая пластина, выходы датчика с первого по пятый соединены с соответствующими входами преобразователя, щестой, седьмой и восьмой входы которого соединены с выходом генератора, вход которого через второй ключ соединен с одним из выходов серводвигателя, который соединен с девятым входом преобразователя, другой выход серводвигателя соединен с десятым входом преобразователя, первый и второй выходы которого соединены соответственно с первым и вторым входами серводвигателя, третий вход которого соединен с плюсовой щиной источника питания, одиннадцатый вход преобразователя соединен с выходом программного блока.
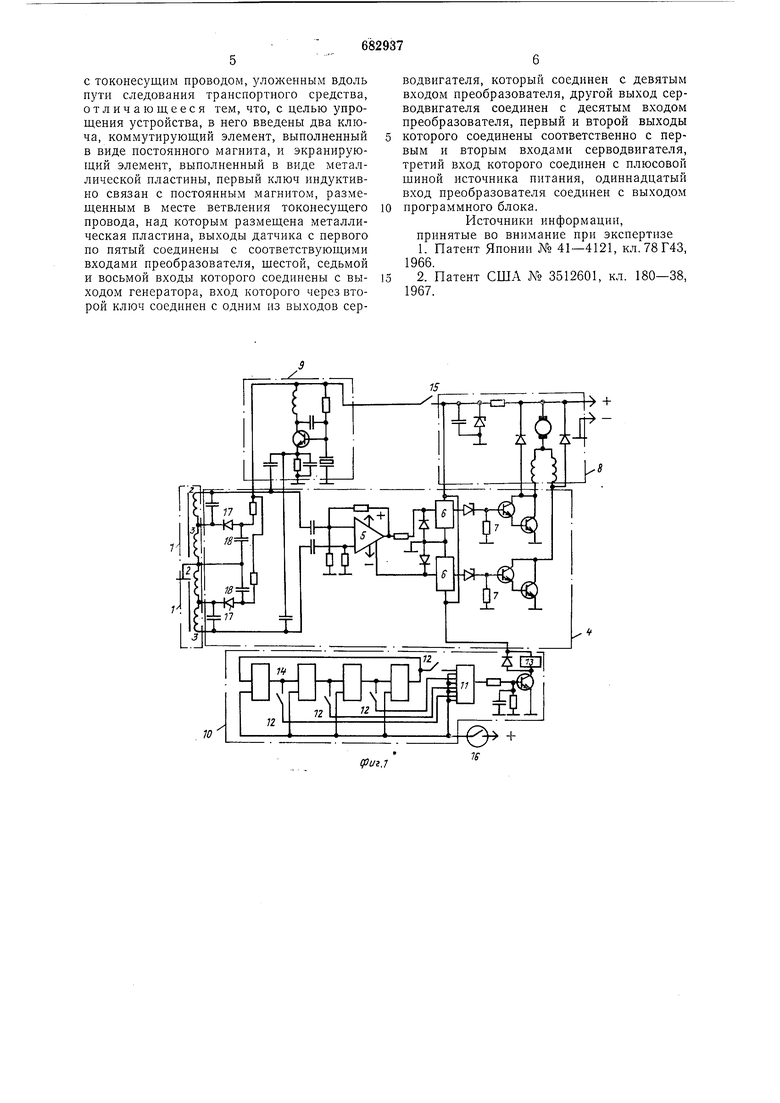
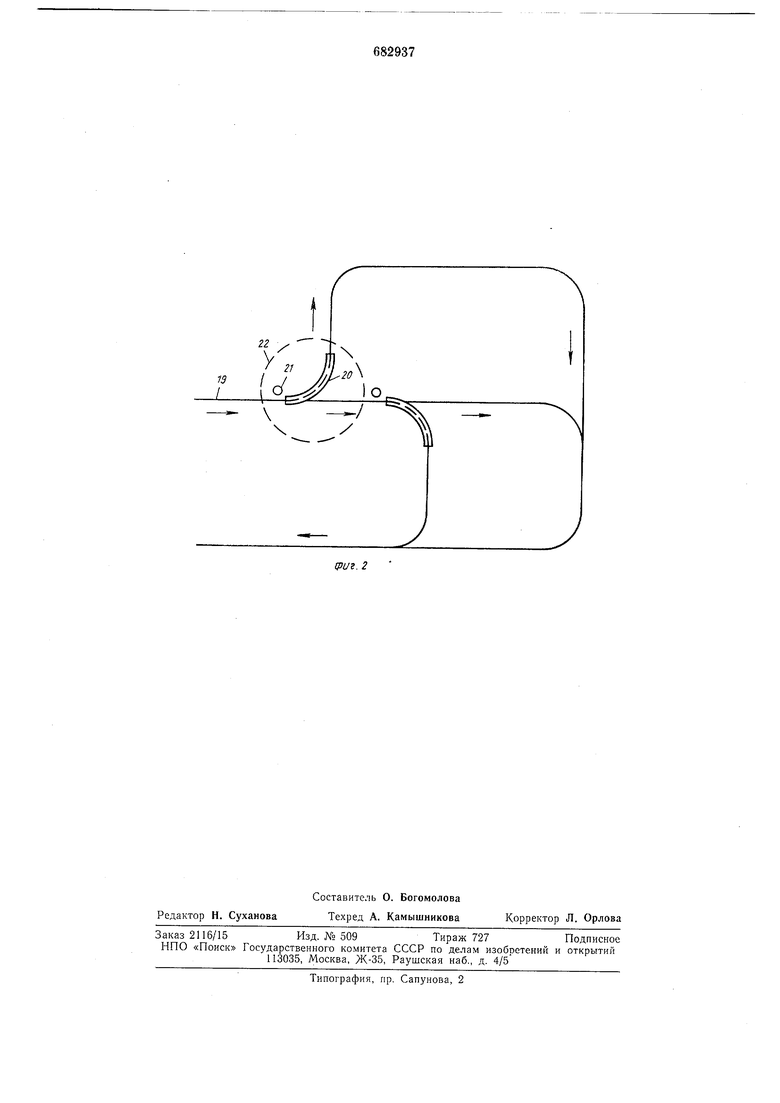
На фиг. 1 представлена принципиальная схема устройства; на фиг. 2-схема варианта трассы. Устройство содержит датчики 1, представляющие собой катущки индуктивности 2 и 3; преобразователь 4; усилитель 5; пороговые элементы 6; усилители мощности 7, выполненные на транзисторах, коллекторными нагрузками которого слул ат статоры обмотки серводвигателя 8; генератор 9; программный блок 10, включающий в себя блок совпадения И, переключатели набора программы 12, реле времени 13 и счетчик 14; ключи 15 и 16; в преобразователе 4 диоды 17, конденсаторы 18; токонесущий провод 19; экранирующий элемент 20; магнит 21; место ветвления 22.
Токонесущий провод 19 представляет собой изолированный провод, уложенный в грунте на небольщой глубине, в который от специального генератора (не показан) подается сигнал звуковой частоты, создающий электромагнитное поле вокруг провода трассы. В местах ветвлений 22 трасса снабжена экранирующими элемеитами 20, выполненными в виде металлических полос, уложенных поверх токонесущего провода, который на этих участках экранирован для исключения электромагнитного поля.
Устройство работает следующим образом.
В исходном состоянии сигналы, наведенные полем токонесущего провода 19, воспринимаются катушками индуктивности 2 и 3 и поступают на входы диффереициального усилителя 5, который выдает сигиал ошибки с полярностью, зависящей от положения катушек индуктивности 2 и 3 относительно токонесущего провода 19. Усиленный сигнал ошибки управляет серводвигателем 8, корректирующим движение транспортного средства. Состояние схемы слежения не наруЩается до места ветвления 22.
Если согласно траектории движения транспортное средство должно двигаться в прямом наиравлении, то в кольцевом счетчике 14 не включен ни один иереключатель набора программы 12. Прохождение транспортным средством места ветвления 22 ири этом не вызывает измеиеиия состояния схемы следящей системы и транспортное средство проследует в прямом направлении.
Если транспортному средству необходимо произвести поворот, включается переключатель набора программы 12, номер которого должен соответствовать номеру поворота. При подходе к месту ветвления 22 постоянный магнит 21 своим полем воздействует на ключ 16, через который поступают импульсы на кольцевой счетчик 14. При появлении, иапример, второго имиульса и
включенном втором выключателе 12 на выходе блока совнадения 11 появляется имиульс, который включает реле времени 13. Последнее через ключ 15 включает генератор высокой частоты 9, дноды 17 через кондеисаторы 18 замкнут катушки индуктивности 3. При этом катушки индуктивности 2 иодключены к дифференциальному усилителю 5 и генератору высокой частоты 9. Исчезает чувствительность катушек индуктивности 2 к электромагнитному нолю токоиесущего провода 19. Устройство становится чувствительным к наличию в зоне датчиков 1 экранирующего элемента 20. Транспортное средство будет следить за
коифигурацией экранирующего элемеита 20, т. е. произойдет поворот в выбранном направлении. Слежение осуществляется за время, равное выдержке реле времени 13, которая выбирается равной иромежутку
времени, за которое транспортное средство проходит участок с экранирующим элемеитом 20.
По отключеиии реле времени 13 схема переходит в первоначальиое состояние.
Устройство вновь становится чувствительным к электромагнитному полю токонесущего провода 19.
Количество мест ветвлений зависит от возможностей кольцевого счетчика 14 или
любого другого счетного устройства ему иодобного.
Установка всех коммутирующих элементов в единой схеме следящей системы, исключение их из трассы движения, значительное упрощеиие мест ответвлений повышает надежность устройства, позволяет применять его в автоматических транспортных средствах на сложных маршрутах передвижения.
,
Формула изобретения
Устройство для управления транспортными средствами, содержащее преобразователь, генератор, серводвигатель, программиый блок и датчик, индуктивно связанный
с токонесущим проводом, уложенным вдоль пути следования транспортного средства, отличающееся тем, что, с целью упрощения устройства, в него введены два ключа, коммутирующий элемент, выполненный в виде постоянного магнита, и экранирующий элемент, выполненный в виде металлической пластины, первый ключ индуктивно связан с постоянным магнитом, размещенным в месте ветвления токонесущего провода, над которым размещена металлическая пластина, выходы датчика с первого по пятый соединены с соответствующими входами преобразователя, щестой, седьмой и восьмой входы которого соединены с выходом генератора, вход которого через второй ключ соединен с одним из выходов серводвигателя, который соединен с девятым входом преобразователя, другой выход серводвигателя соединен с десятым входом преобразователя, первый и второй выходы которого соединены соответственно с первым и вторым входами серводвигателя, третий вход которого соединен с плюсовой шиной источника питания, одиннадцатый вход преобразователя соединен с выходом программного блока.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии ЛЬ 41-4121, кл. 78Г43, 1966.
2.Патент США № 3512601, кл. 180-38, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением траспортного средства | 1977 |
|
SU690450A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 1989 |
|
RU2015524C1 |
| Устройство для определения местоположения транспортного средства | 1984 |
|
SU1252762A1 |
| Система управления движением транспортного средства | 1979 |
|
SU860012A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Система управления автоматического напольного электротранспорта | 1985 |
|
SU1274102A1 |
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
7f
w,;
/
Ч
.2
