(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Устройство для горячего лужения деталей | 1983 |
|
SU1177384A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| Схват промышленного робота | 1976 |
|
SU631330A1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
1
Изобретение относится к области машиностроения, а именно к захватам манипуляторов и автооператоров, предназначенных для монтажно-сборочных, подъемно-транспортных и других технологических операций.
Известен захват, предназначенный для закреплё аия цилиндрических деталей губками, выполненными призматическими 1 ,
Недостатком этого захвата являетс то, что положение продольной оси при изменении диаметра детали не постоянно, что снижает его технологически возможности..
.Наиболее близким решением из известных является захват манипулятора соХ1ержащий корпус, шарнирно установлсккые подвижные призматические..губки, кулачковый механизм, профиль кулачка которого обеспечивает возможность согласованного радиального и осевого перемещения губок для обеспечения постоянного положения центра окружности, вписанной в .призмы губок, при различных ее диаметрах, и механи-зм . привода 2 .
Недостаток захвата заключается в том, что он не обладает достаточными технологическими возможностями
вследствие небольшого диапазона диаметров захватываемых деталей.
Целью настоящего изобретения является расширение технологических возможностей путем увеличения диапазона диаметров захватываемых деталей.
Указанна.я цель достигается тем, что каждая губка снабжена поводком, расположенным в. продольном пазу, вы0полненном на шестерне механизма привода, ;а кулачок смонтирован на корпусе с возможностью поворота в плоскости перемещения губок.
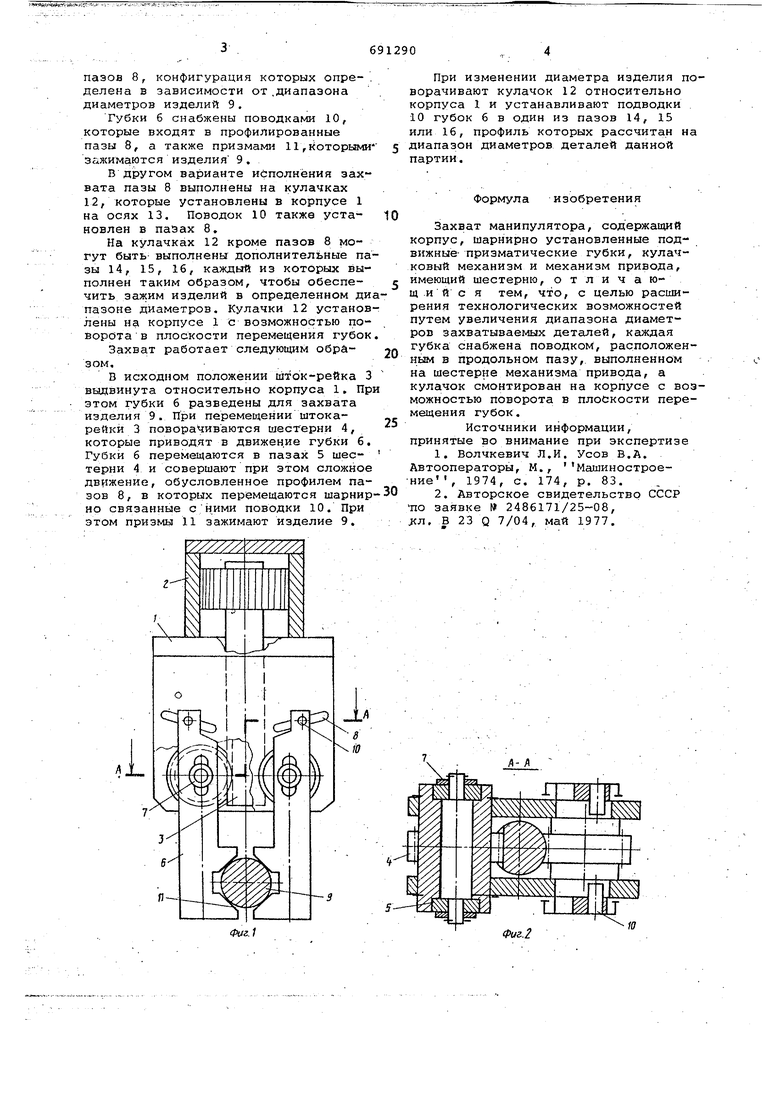
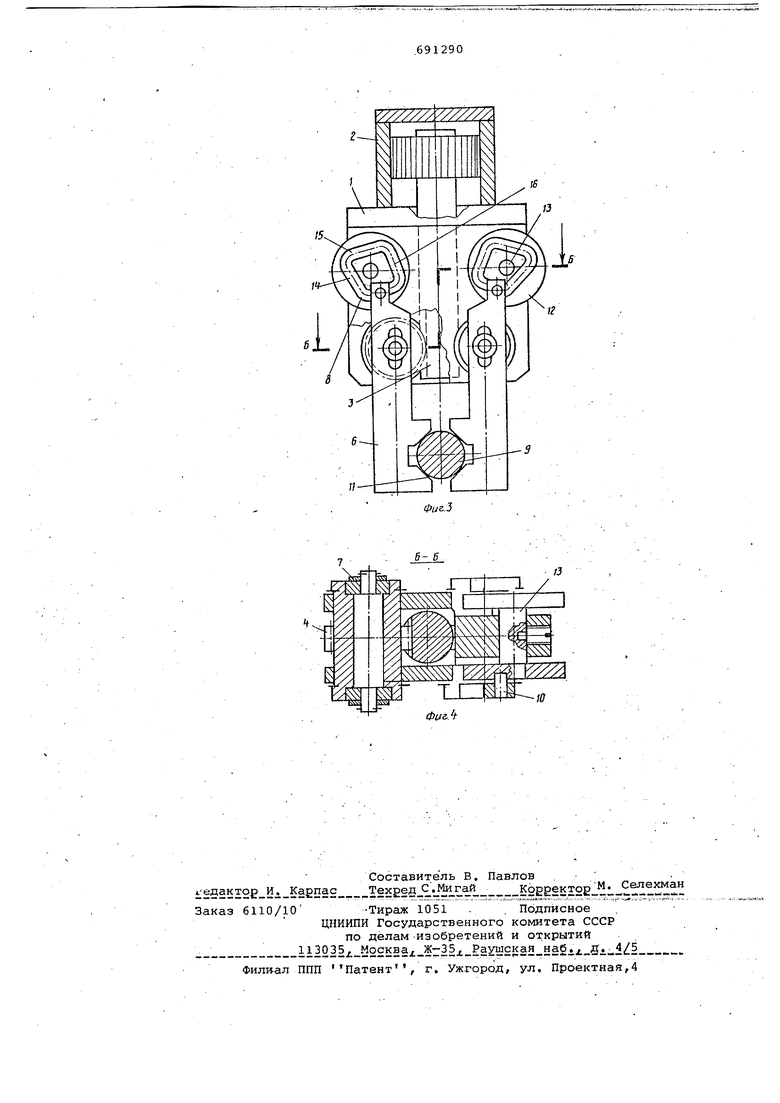
На фиг. i изображен общий вид зах5вата; на фиг. 2 - разрез по А-А на фиг, 1; на фиг. 3 -. общий вид захвата (вариант) на фиг. 4 - разрез по Б-Б на фиг.З.
Захват манипулятора содержит кор0пус 1, на котором установлен гидроцилиндр 2, Шток-рейка 3 кинематичес ки связана с шестерня1«да 4, установленными н корпусе 1, В шестернях 4 выполнены продольные пазы 5, ширина
5 которых соответствует ширине зажимных губок 6 и которые допускают от.носительное их перемещение. Губки . 6 зафиксированы от осевого перемещения стопорами 7, На корпусе 1 выпол0нены профилированные элементы в виде
пазов 8, конфигурация которых опре- . делена в зависимости от .диапазона диаметров изделий 9.
Губки 6 снабжены поводками 10, которые входят в профилированные пазы 8, а также призмами 11,Которыми зглжимаются изделия 9. ,
В другом варианте исполнения захвата пазы 8 выполнены на кулачках 12, которые установлены в корпусе 1 на осях 13. Поводок 10 также установлен в паэах 8,
На кулачках 12 кроме пазов 8 могут быть- выполнены дополнительные пазы 14, 15, 16, каждый из которых выполнен таким образом, чтобы обеспечить за5ким изделий в определенном диапазоне диаметров. Кулачки 12 установлены на корпусе 1 с возможностью поворота в плоскости перемещения губок
Захват работает следующим образом. - .
в исходном положении шток-рейка 3 выдвинута относительно корпуса 1. При этом губки 6 разведены для захвата изделия 9. При перемещении штокарейки 3 поворачиваются шестерни 4, которые приводят в движен.ие губки 6. Губки 6 перемещаются в пазах 5 шеетерни 4 и совершают при этом сложное движение, обусловленное профилем пазов 8, в которых перемещаются шарнир но связанные сними поводки 10. При этом призмы 11 зажимают изделие 9.
При изменении диаметра изделия поворачивают кулачок 12 относительно корпуса 1 и устанавливают подводки 10 губок 6 в один из пазов 14, 15 или 16, профиль которых рассчитан на диапазон диаметров деталей данной партии.
Формула изобретения
Захват манипулятора, содержащий корпус, шарнирно установленные подвижные- призматические губки, кулачковый механизм и механизм привода, имеющий шестерню, о т л и ч а ющ-И и с я тем, что, с целью расширения технологических возможностей путем увеличения диапазона диаметров захватываемых деталей, каждая губка снабжена поводкоМ, расположенным в продольном пазу, выполненном на шестерне механизма привода, а кулачок смонтирован на корпусе с воможностью поворота в плоскости перемещения губок.
Источники информации, принятые во внимание при экспертизе
. В 23 Q 7/04, май 1977.
/5.
/3
б- 6
13
фщА
