1
Изобретение от носится к области автоматического регулирования и, может быть использовано при автоматизации дискретно-непрерьгвных технологических процессов, когда сочетаются требования высокого быстродействия системы регулирОЕШНия в пусковом режиме и повышенной точности автоматической стабилизации..
Известен способ автоматического трехпозиционного регулирования Llj, заключающийся в том, что в зависимости от величины действующих возмущений (нагрузки объекта регулирования) с помощью дополнительного устройства устанавливается регулирующий сигнал средней позиции трёхлозиционното регулятора, удерживающий регулируемую величину между уровнями регулируемой величины, при кот&рых происходит переключение позиций регулятора, т.е. в зоне норма.
Недостатком этого способа является низкое быстродействие системы регулирования в пусковом режиме, так как
ВОЗМОЖНОСТЬ уменьшения времени объекта регулирования на заданный режим за счет увеличения управляющего сигнала верхней позиции ограничена соответствующим увеличением перерегулиробания вследствие необходимости установления малой щирины зоны норма.
Наиболее близким к данному изобретению техническим решенйек является способ настройки трехпозиционного регулятора 21, основанный на задании трех величин регулирующих сигналов, соответствующих верхней, средней и нижней позициям регулятора, и двух уровней регулируемой величины, при которых происходит переключение этих позиций.
Способ заключается в следующем. Регулирующий сигнал нижней позиции устанавливают таким, чтобы под его воздействием при минимальной нагрузке объекта регулирования установившееся значение регулируемой величины не превьшало верхнего уровня переключения позиций, регулирующий сигнал верхней
позиции устанавливают таким, чтобы под его воздействием при максимальной нагрузке объекта установившееся значени регулируемой величины было не меньше нижнего уровня переключения позиций,
la регулирующий сигнал средней позиции выбирают так, чтобы под его воздействием при номинальной нагрузке объекта регулируемая величина находилась между уровнями переключения погшций ( в зоне норма). Причем, регулирующи сигнал верхней позиции и нижний уровень переключения выбирают так, чтобы обес-печить минимальные значения времени вывода регулируемой величины на заданный режим после включения регулятора, перерегулирования и диапазона отклонения регулируемой величины от заданного значения в процессе автоматической стабилизации.
Недостатком такого способа являются сложность выбора оптималышхх настроек трехпозиционного регулятора, а также низкое быстродействие системьг регулирования в пусковом режиме и низкая точность автоматической стабилизации при колебаниях нагрузки объекта регулирования. Перечисленные недостатки обусловленны тем, что известные способы предполагают возможность нерегулируемого изменения величины в зоне норма при колебаниях нагрузки объекта. Поэтому для уменьшения диапазона отклонений регулируемой величины в процессе автоматической стабилизации необходимо сужать зону норма. Последнее условие ограничивает возможност ускорения вшгеода регулируемой величины на заданное значение после включения регулятора за счет увеличения регулирующего сигнала верхней позиции, так как при малой ширине зоны норма перерегулирование может стать недопустимо большим. Для уменьшения перерегулирования переключение с верхней позиции на среднюю необходимо производить заблаговременно (с упреждением), тоесть уЕ1еличивать ширину зоны норма, но это ведет к соответствующему увеличению диапазона отклонений регулируемо величины при колебаниях нагрузки.
Отмеченная взаимозависимость трех качественных показателей {время вывода регулируемой величины на заданное значение, нерегулирование, диапазон отклонений регулируемой величины) не только усложняет выбор оптт мальных настроек трехпозиционного регулятора, но и не
позволяет улучшать один из показателей без ущерба для других.
Целью изобретения является упрощение настройки трехпозиционного регулятора при повьпиении быстродействия в пусковом режиме и точности стабилизации.
Поставленная цель достигается тем, что предварительно устанавливают верхний уровень переключения позиций в соответствии с заданным значением регулируемой величины, переключают регулятор на среднюю позицию и обеспечивают максимальную нагрузку объекта регулирования, затем устанавливают величину регулирующего сигнала, при которой установившееся значение регулируемой величиш соответствует верхнему уровню переключения позиций, переключают регулятор на нижнюю позицию и устанавливают соответствующий регулирующий сигнал, переключают регулятор на верхнюю позицию, обеспечивают нагрузку объекта регулирования, соответствующего ее значению при выводе объекта на заданный режим после включения регулятора, устанавливают максимально допустимый управляющий сигнал и выбирают нижний уровень переключения позиций, при котором время вывода регулируемой величины на верхний уровень переключения позиций минимально при заданном ограничении на перерегулирование.
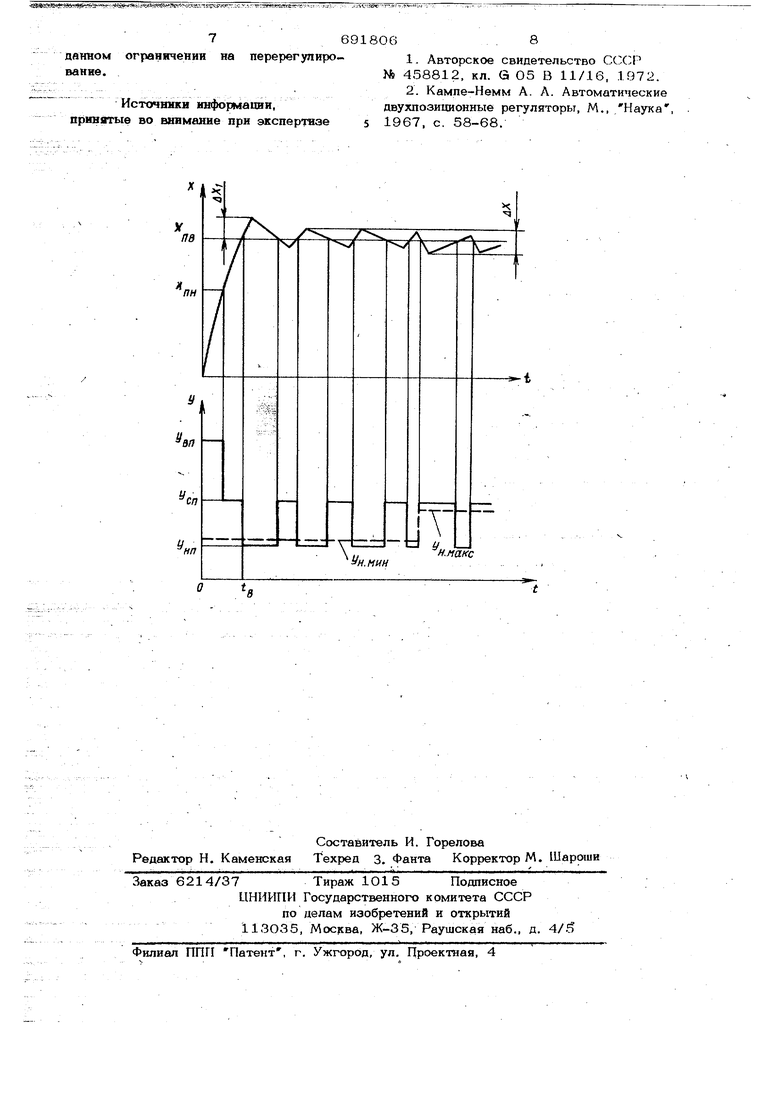
На чертеже представлены графики изменения регулирующего сигнала и регулируемой величины в процессе работЬ трехпозиционного регулятора при изменении нагрузки объекта регулирования от минимального до максимального значений.
Настройку регулятора производят в следующем порядке.
Устанавливают задатчик верхнего уровня ХПВ переключения позиций регулятора на заданное (номинальное) значение регулируемой величины X.
Переключают регулятор на среднюю
ПОЗИ1ШЮ.
Обеспечивают максимальную нагрузку У,
объекта регулирования и устанмакс
ливают регулирующий сигнал УСП средней позиции таким, чтобы под его воздействием установившееся значение X соответствовало верхнему уровню X р переключения позиций.
Переключают регулятор на нижнюю позицию. (Обеспечивают минимальную нагрузку И длин объекта регулирования и устана ливают регулирующий сигиап У, нижней ПОЗИЦИИ таким, чтобт 1 под его воздействием установившееся значение X соответствовало бы верхнему уровню X fig, переключения позиций. Переключают регулятор на верхнюю позицию. Обеспечивают нагрузку объекта, соот ветствующую ее значению при выводе объекта на заданный режим после ВКЛЕОчения регулятора. Устанавливают максимально допустамый регулирующий сигнал У верхней позиции. Устанавливают начальное v3Ha4eHHe нижнего уровня X переключения позиций регулятора. Выключают регулятор до достижения регулируемой величиной начального значения Хр. Включают регулятор и фиксируют зна чения времени tg вывода регулируемой величины на верхний уровень Xпереключения позиций и перерегулирование ЛХ . Изменяют нижний ровень) переключения позиций и повторяют две предыдущи операции до тех пор, пока время вывода -tg не станет минимальным при заданном ограничении на перерегулировани На чертеже видно, что при данном способе настройки регулируемая величин X остается на верхнем уровне X пер ключения позиций при изменении нагрузки от минимального до максимального значений X (.,,,в го время ка при известном способе настройки в случае максимальной нагрузки регулируема величина переходит на нижний уровень переключения позиций X . Поэтому при предложенном способе устраняется взаимозависимость показателей пускового режима и автоматический стабилизации, характерная для извес ного способа и, следовательно, упрощает ся оптимальная настройка трехнозипионного регулятора: управляюидай сигнал верхней позиции и нижний уровень переключения позиций выбирают только из условия обеспечения минимал1,ного времени вывода регулируемой величины на заданное значение в пусковом режиме при заданном ограничении на перерегулирование, т.е. без учета требования к диапазону отключений регулируемой величинъг в процессе автоматической стабилизиции. Причем появляется возможность увел1Г1ения быстродействия в пусковом режиме, для чего управляющий сигнал задают равным максимально возможному значению, а соответствующее увеличение перерегулирования компенсируют уменьшением нижнего уровня переключения, диапазон отклонений регулируемой величины зависит только от диапазона колебаний нагрузки, что способствует повыщению точн.ости автоматической стабилизации. Формула изобретени.я Способ настройки трехпозиционного автоматического регулятора, основаншлй на задании величин трех регулирующих сигналов, соответствующих позициям регулятора и двух уровней регулируемой величины, при которых происходит переключение позиций, причем регулирующий сигнал нижней позиции выбирают нз условия, чтобы под его воздействием при минимальной нагрузке объекта регулирования установивщееся значение регулируемой величины не превыщало бы верхнего уровня переключения позиций, отличающийся, тем, что, с целью упрощения настройки регулятора при повышении быстродействия в пусковом режиме и точности стабилизации, предварительно устанавливают верхний уровень переключения позиций в соответствии с заданным значением регулируемой величины, переключают регулятор на среднюю позицию и обеспечивают максимальную нагрузку объекта регулирования, затем устанавливают величину регулирующего сигнала, при которой установившееся значение регулируемой величины соответствует верхнему уровню переключения позиций, переключают регулягор на нижнюю позицию и устанавливают соответствующий регулирующий cm нал, переключают регулятор на верхнюю позицию, обеспечивают нагрузку объекта регулирования, соответствующую ее значению при выводе объекта на заданный режим после включения регулятора, устанавливают максимально допустимый управляющий сигнал и выбирают нижний уровень переключения позиций, при котором время вывода регулируемой величины на верхний уровень переключения позиций минимально при за7691806, 8
данном ограничении на перерегулиро-i. Авторское свидетельство СССР
вание.М( 458812, кл. G 05 В 11/16, 1972.
2. Кампе-Немм А. А. Автоматические
Источники информации,двухпозиционные регуляторы, М., Наука,
принятые во внимание при экспертизе s 1967, с. 58-68.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЭНЕРГОУСТАНОВКИ | 2007 |
|
RU2341690C1 |
| Способ управления процессом графитации в печи | 1980 |
|
SU929552A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
Оt
