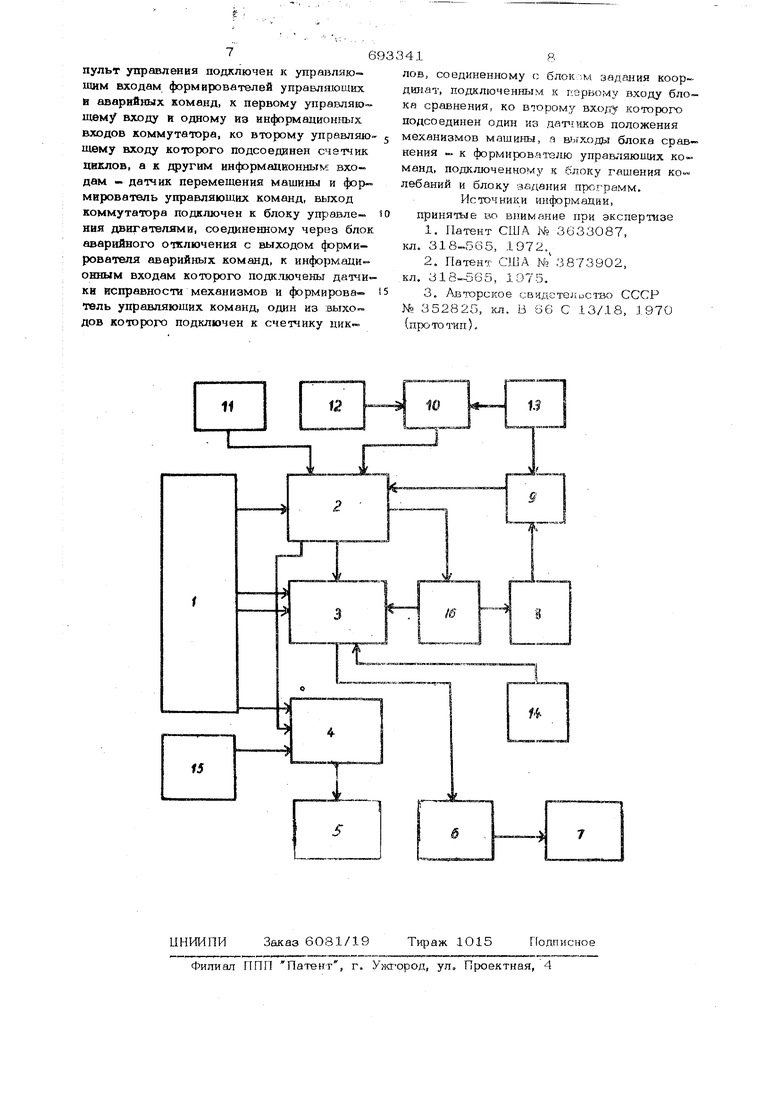
. Изобретение относится к области управления электрическими перегрузочными машинами циклического действия и может быть использовано для автоматического управления портовыми кранами. Известны метод и устройство задания и контроля траектории движения механизма, управляемого цифровыми командами, в котором вырабатываются импульсы, характеризующие траекторию движения механизма, которьге сравниваются с импульсами, вырабатываемыми программой, дополнительная буферная память использует ся для йадержки момента формирования импульсов, задающих траекторию движения l . Известна также позиционирующая система управления для подьемно-транспорт ных машин, в которой управление перемещением транспортного средства в заданное положение относительно выбранной остановки происходит при помощи системы управления, тяговое устройство в транспортном средстве предназначено для его передвижения вперед, назад и по пути, проходящему около места остановки Недостатком рассмотренных устройств является то, что они рассчитаны на применение только к жестким механизмам, совершающим прямолинейное движение, и кроме того, в этих устройствах не указаны узлы или блоки, обеспечивающие безаварийность эксплуатации в случае отказа патентуемых блоков. Наиболее близким rio технической сущности к. предлагаемому является устройство для управления перегрузочной машиной, содержащее пульт управления, блок управления двигателями, соединенный с блоком регулирования тормозного момента двигателей, блок гашения колебаний, подключенные к нему датчики положения механизмов машины и блок задания программ з, Недостатаами этого устройства являются необходимость постоянного участия оператора в управлении перегрузочным 36 процессом и отсутствие устройств аашиты при возникновении неисправности как в самой системе, так и в элементах перегрузочной машины. Цель изобретения - повышение эксплу атацяонной надежности устройсгеа и расширение его функциональных возможноетей, что повышает производительность труда при перегрузочных операциях. Поставленная цель достигается тем, что в устройство введены блоки сравнения, аварийного отключения и задания ко ординат, формирователи управляющих и аварийных команд, датчики исправности механизмов машины и перемещения машины счетчик циклов и коммутатор, причем пульт управления подключен к управляющим входам формирователей управляющих и аварийных команд, к первому управля- юшему входу и одному из информационны входов коммутатх)ра, ко управляющему входу которого подсоединен счетчик циклов, а к другим информационным входам - датчик перемещения машины и формирователь управляющих команд, выход коммутатора подключен к блоку управления двигателями, соединенному через блок аварийного отключения с выходом формирователя аварийных команд, к информационным входам которохх) подключены датчики исправности механизмов и формирователь управляющих команд, один из выходов которого подключен к счетчику циклов, соединенному с блоком задания координат, подключенным к первому входу блока сравнения, ко второму входу которого подсоединен один из датчиков положения механизмов машины, а выход блока сравнения к формирователю управляющих команд, подключенному блоку гашения колебаний и блоку задания программ. На чертеже представлена структурная схема устройства. Устройство содержит пульт управления 1, формирователь управляющих команд 2, коммутатор 3, формирователь аварийных команд 4, блок аварийногч отключения 5 блок управления двигателями 6, блок регулирования тормозного момента двигателей 7, блок задания координат 8, блок сравнения 9, блок гашения колебаний 10 блок задания программ 11, датчики положения механизмов машины 12, 13, дат чик перемещения машины 14, датчики исправности механизмов машины 15 и счет чик циклов Д6. 41.4 Устройство ноэволяет осуществить дистанционное, дистанционно-программное, с обязательным участием оператора в процесбе выполнения перегрузочных операций, и полностью автоматическое, без участия оператора после запуска устройства в действие, управления перегрузочной машиной. . Устройство работает следующим обрааом. При дистанционном управлении коммутатор 3 подключает блок управления двигателями 6 непосредственно к пульту управления, и оператор может управлять движением механизмов перегрузочной машины дистанционно из любого удобного для него места с целью повышения точности операций захвата груза и освобождения от него. При дистанционно-программном управ-. оператор задает координаты мест захвата и выгрузки груза на блоке задакия координат 8, программу цикла на блоке задания программ 11, ограничения рабочей зоны перемешения механизмов на датчиках перемещения механизмов 13 и выполняет в последующем только операции наведения грузрзахват«ого органа на груз с последующим его захватом. Остальные операции цикла - перемещение груза к месту выгрузки, освобождение от груза грузозахватного устройства и возвращение последнего к месту захвата груза-выполняются программным автоматическим устройством после отдачи оператором команды с пульта управления. В устройстве при данном варианте управления счетчик циклов 16 не действует. При автоматическом управлении оператор задает исходные координаты места захвата и выгруеки груза на блоке задания координат 8, устанавливает ограничения рабочей зоны перемещения механизмов на датчиках 15, включает с пульта управления формирователь управляющих команд, задает программу цикла на блоке задания программ . 11 и изменения координат на блоке задания координат 8 и по команде с пульта управления 1 приводит устройство в действие. Автоматическое управление осуществляется при этом в следующей последовательности. 1. Выполнение заданного количества однотипных циклов без изменения задания координат места захвата груза. Цикл включает в себя выполнение операций переноса груза к месту выгрузки освобождение захвата груза так, как это предусмотрено при дистанциопно-программ ном управлений. После остановки всех мв ханизмов перегрузочной машины в успокоения колебаний грузозахватного органа из формирователя управляющих команд 2 поступает команда на выполнение операций опускания грузозахватного органа на груз Последняя операция заканчивается тогда, когда грузозахватный орган войдет в полное соприкосновение с грузом, что соответствует моменту отсутствия первого сигнала рассогласования между датчиком 13 и блоком 8 на линии блок сравнения 9 - формирователь управляющих команд 2. Как только это произойдет, формирователь 2 вырабатывает команду захват груза, и выполняется операция захвата груза, контролируемая датчиками 13. Последняя операция заканчивается в момент исчезновения второго сигнала рассогласования между датчиками 13 и блоком 8 на линии блок сравнения 9 - формирователь управляющих команд 2. При этом завершается цикл автоматического управления перегрузочной машиной, и формирователь 2 вырабатывает команды на выполнение операции переноса груза к месту выгрузки, т.е. повторение вышеперечисленных операций. Каждый цикл фиксируется счетчиком циклов 16, который вырабатывает команду на блок 8. Как только будет набрано заданное число циклов, что приводит к изменению заданных в исходном положении координат места захвата груза на определенную величину приращения, осуществляется шаг изменения задания координат места захвата груза на определенную величину приращения. 2. Выполнение заданного количества шагов измерения задания координат места захвата груза в определенных йоследовательности и направлениг. Каждый шаг осуществляется путем И.Г дачи команды на блок 8 от счетчика циклов 16. В промежутке между шагами выполняются однотипные циклы (см. п, 1). Это позволяет осуществить выборку груза по заданной программе с определенной площади места захвата без изменения положения перегрузочной машины в целом. Количество шагов также контролируется счетчиком циклов 16, и, как только оно достигает заданной величины, со c4eT4Hk циклов 16 поступает команда через коммутатор 3 на отключение формирователя 2 от блока 6, и действие механизмов пе регрузочной машины прекращается. 3. Выполнение операции перемещения перегрузочной мащины из одного стационарного состояния в другое. Блок 6 подключается через коммутатор 3 к датчику 14 при остановленных механизмах перегрузочной машины, которые реализуют перемещение грузозахватного органа в пространстве. Процесс перемещения контролируется датчиком 14 и как только перегрузочная машина переместит ся в заданном направлении до установленной величины перемещения, процесс первгмещения, а с ним и работа автоматического устройства, заканчиваются. Задание режима последующей работы, перегрузочной машины передается оператору. Поскольку в процессе автоматического управления могут возникать неисправности, в устройстве предусмотрена схема аварийного отключения механизмов крана при отхазе элементов или схемы устройства, приводящем к нарушений программы выполнения перегрузочных операций, или отказе узлов или устройств перегрузочной мащины. В первом случае команда на аварийное отключение поступает с формирователя 2 через формирователь 4 на блок 5, а во втором случае эти команды поступают с формирователя 4 при наличии сигналов с датчиков 15. Испытания показали повышение эксплуатационной надежности устройства и расширение вариантов его применения. Ожидаемый экономический эффект от внедрения предложения составит не .менее, 7 тыс. руб. в год на один комплект устройства.. Формула Изобретения Устройство для управления перегрузочной машиной,содержащее пульт управления и блок управления двигателями, соединенный с блоком регулирования тормозного момента двигателей, блок гашения колебаний, подключенные к нему датчики положения механизмов мащины и блок задания программ, отличающееся тем, что, с целью расширения функциональных возможностей и повышения надежности устройства, в него введены блоки сравнения, аварийного отключения и задания координат, формирователи управляющих и аварийных команд, дiaтчики исправности механизмов машины и перемещения машины, счетчик циклов и коммутатор, причем - V-:, „ 7 6 пульт управления подключен к управляющим входам формирователей управляющих в аварийных команд, к первому управляющем/ входу и одному из информационных входов коммутатора, ко второму управляю щему входу которого подсоединен счетчик ПИЕлов, а к другим информационным входам - датчик перемещения машины и формирователь управляющих команд, выход коммутатора подключен к блоку управления двигателями, соединенному через блок аварийного отключения с выходом формирователя аварийных команд, к информационным входам которого подключены датчи ки исправноста механизмов и формирова- тель управляющих команд, один из выходов которого подключен к счетчику цик41 . 8 . . лов, соединенному с блоком задания координат, подключенным к первому входу блока сравнения, ко второму входу которого подсоединен один из датчиков положения механизмов машины, а выходы блока сравнения - к формирователю управляющих команд, подключенному к блоку гашения колебаний и блоку задания программ. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3633087, 318-565, 1972. 2.Патент США Мь3873902, 318-565, 1975. 3.Авторское свидетельсгео СССР № 352825, кл. В 66 С 13/18, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2092423C1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Устройство для программного управ-лЕНия KPAHOM C дВуМя гРузОзАХВАТАМи | 1979 |
|
SU834672A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
