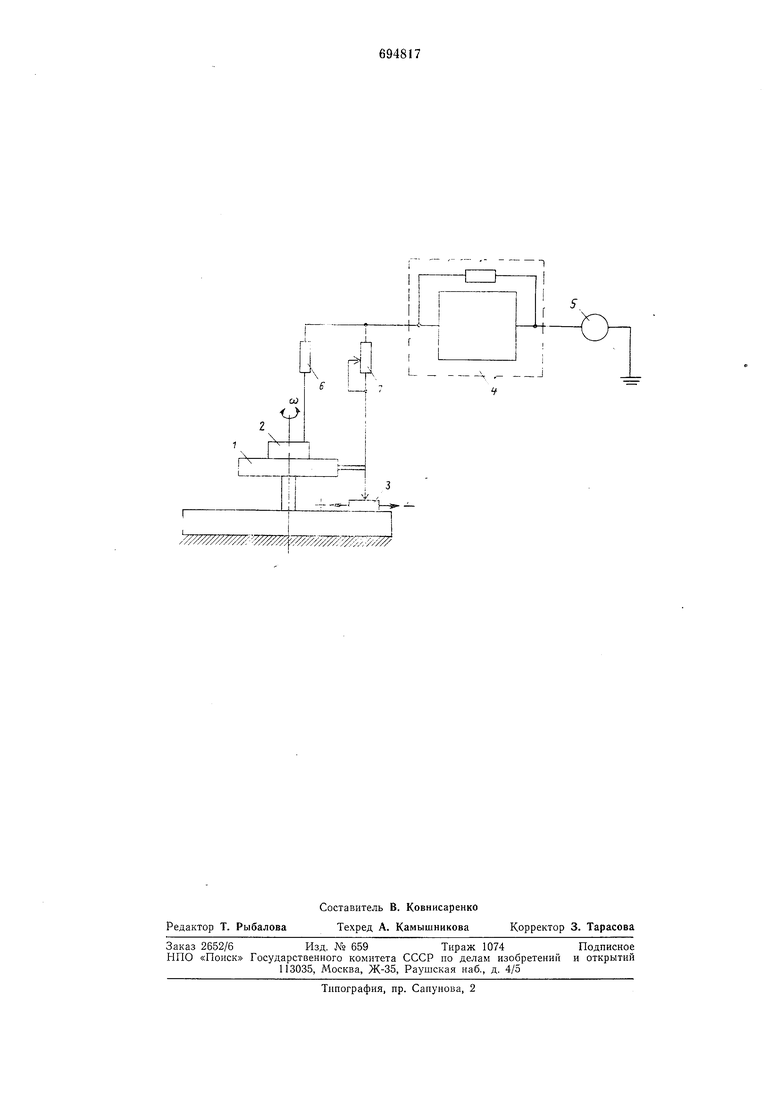
a выходной сигнал датчика угловой скорости (ДУС) С/дус - А дус-«p-w-cos to,(2) где /Сду - крутизна характеристик ДУ, В/град; t/дус - крутизна характеристики ДУС, В/с; - круговая частота колебаний, 1/с; / - частота колебаний стенда, Ф - амплитудаколебании стенда, град. Выходные сигналы ДУС и ДУ через соответствующие входные сопротивления 6 и 7 подключаются к общему суммирующему входу операционного усилителя 4 постоянного тока, охваченного отрицательной обратной связью. Для организации принципа компенсационного измерения необходимо, чтобы фазы ДУС 2 и ДУ 3 совпадали. С этой целью входное сопротивление 6 усилителя 4 и в цепи сигнала ДУС представляет собой фазосдвигающую (например, интегрирующую) цепочку с полным (комплексным) сопротивлением Z. При этом выходной сигнал усилителя ./вых . На практике операцию интегрирования на входе операционного усилителя выполняют с помощью Т-образного фильтра, при этом Z 2I(l+J мф У 1 .ф-Сф - постоянная времени фильтра, с; Ф - сопротивление резистора одного плеча фильтра, МОм; фильтра, Сф - емкость конденсатора При условии ( данный, фильтр частоте колебаний стенда работает идеальный интегратор, т. е. г .о). Подставляя в формулу (3) выражения (1), (2) и (4), получаем ) + -- . X АДУС р COS of. Домножив числитель и.знаменатель второго слагаемого на (-/) и учтя, что / cos 10 а (-JY 1, получаем 7,, /СДУТ Sin Ш ЫX АГдус.срзтшг;,(5) откуда следует, что Подбором коэффициентов усилителя 4 по сигналам ДУС и ДУ выходной сигнал усилителя можно свести к нулю, при этом крутизна характеристики ДУС определяется следующим образом: ДУС При выбранных значениях Rф, Сф и /Сду измерение крутизны характеристики ДУС производят в процессе колебаний стенда при скомпенсированном выходном сигнале ДУС на выходе усилителя. Компенсацию осуществляют изменением коэффициента усиления в цепи датчика угла с помощью переменного входного резистора 7. Изменение выходного сигнала усилителя до нуля (или допустимого минимума) фиксируют с помощью измерительного прибора 5. Желаемая точность компенсации может быть достигнута повыщением общего коэффициента усиления суммы сигналов ДУС и ДУ за счет увеличения сопротивления обратной связи усилителя. Проградуировав положение движка переменного резистора 7 в процентах изменения крутизны датчика относительно его номинального значения по окончании процесса компенсации получают действительное зНачение крутизны характеристики испытуемого датчика. Формула изобретения Устройство для тарировки измерителей угловой скоросТй и ускорения, содержащее стенд гармонических колебаний с испытуемым измерителем и регистрирующий прибор, отличающееся тем, что, с целью повыщения точности тарировки, оно снабжено датчиком угла, установленным на стенде, переменным резистором, операционным усилителем и фазосдвигающей цепочкой, при этом вход операционного усилителя через параллельно соединенные переменный резистор и фазосдвигающую цепь соединен с датчиком угла и тарируемым измерителем, а выход - с регистрирующим прибором. Источники информации, приняТые во внимание при экспертизе 1.Авторское свидетельство СССР № 426159, кл. ,G 01Р 21/00, 1973. 2.Патент Великобритании № 1112241, кл. G 1К, опублик. 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тарировки измерителей угловой скорости и ускорения | 1979 |
|
SU871079A1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |