1
Изобретение относится к машиностроению, а именно, к промышленным роботам и манипуляторам, предназначенным для работы со сменньтми захватными головками.
Известно манипулирующее устройство, предназначенное для работы со сменными захватными головками, в котором эти головкиудерживаются на корпусе при помощи пружинных фиксаторов 1 .
Недостатком указанного устройств является то, что манипулирование может производиться только одной деталью для которой предназначена захватная головка.
Наиболее близким к изобретению является манипулирующее устройство, содержащее корпус с расположенным в нем толкателем, установленным в шпинделе с возможностью возвратнопоступательного перемещения, сменну головку с фланцем на цилиндрическом хвостовике и механизм ее фиксации на шпинделе 2.
Однако данное манипулирующее устройство не обладает высокими эксплуатационными качествами,так ка технологические возможности устройства ограничены тем, что манипулирование производится только одной деталью строго определенной захватной головкой, спроектированной для дан.ного типоразмера деталей. Смена головок осуществляется вручную, фиксация головки в осевом направлении выполняется байонетным замком, а в угловом направлении фиксируется от проворота выступом шпинделя, к кото0рому оно жестко крепится винтом, что не позволяет автоматизировать смену головок в автоматическом цикле работы устройства, чем значительно снижае: производительность обслуживаемого
5 оборудования за счет увеличения времени на перенастройку и смену захватной головки в мелкосерийном производстве.
Целью изобретения является повыше0ние эксплуатационных качеств путем обеспечения возможности автоматической смены захватных головок.
Указанная цель достигается тем, что в предлагаемом устройстве меха5низм фиксации выполнен в виде щарнирно установленного и подпружиненного на шпинделе двуплечего рычага, на одном из плеч которого смонтирован ролик, на другом закреплен зуб, а на
0
фланце сменной головки образован паз связанный с этим зубом.
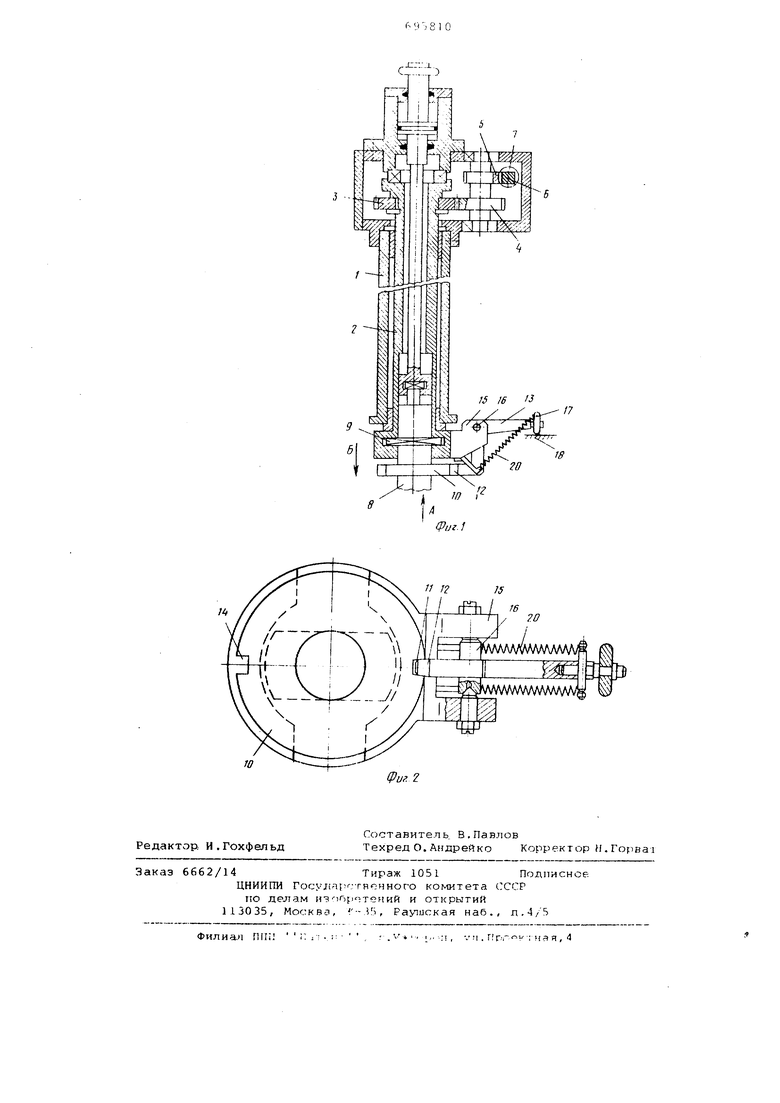
На фиг.1 изображено устройство в разрезе; на фиг.2 - вид А фиг.1.
Корпус 1 устройства несет вращающийся шпиндель 2, на котором закреплено зубчатое колесо 3, связанное через зубчатые колеса 4 и 5 с рейкой нарезанной на штоке 6 гидроцилиндра 7.
Сменная захватная головка 8 в осевом направлении запирается байонетньам замком 9, а для фиксации ее углового положения она снабжена фланцем 10, имеющим паз 11, в который входит зуб 12 двуплечего рычага 13 при фиксации захватной головки в шпинделе 2, Фиксация в углэвом направления сменных захватных головок в гнездах магазина для хранения осуществляется по отверстию 14. Рычаг 13 установлен на кронштейне 15 с возможностью поворота вокруг оси 16. Ча конце рычаг смонтирован ролик 17, взаимодействующий с упором 18, выполненным на гнезде магазина (не показано). с нижней стороны к кронштейну крепится планка 19, к ней, в свою очередь, пркреппены пружины 20, другой конец которых закреплен на рычаге 13.
Устройство работает следующим образом.
При смене захватной головки 8 манипулирующее устройство располагается над свободным гнездом магазина. При подаче команды на смену захватной головки манипулирующее устройств начинает перемещаться вниз з направлении стрелки Б, при этом ролик 17 находит на упор 18 гнезда магазина И рычаг 13, поворачиваясь вокруг оси 16, выводит из паза 11 фиксирующий зуб 12 рычага 13, а шпиндель 2 поворачивается на 90, отпирая байонетный замок 9 и представляя, тем самым, захватной голозке 8 возможность оставаться в гнезде магазина при движении манипулирующего устройства вверх. Затем манипулирующее устройство располагается над следующим гнездом магазина с другой захватной головкой, шпиндель начинает опускаться вниз, ролик 17 находит на упор 18 следующего гнезда, поворачивая рычаг 13 и давая возможность следующей захватной головке. ,беспрепятственно войти в цилиндрическую расточку шпинделя 2. Затем осуществляется разворот .шпинделя на 90 и фиксация захватной головки в осевом направлении при помощи байонетного замка 9. При движении шпинделя 2 вместе с захватной го.повкой 8 вверх ролик 17 сходит с упора 18, а пружины 20, сжимаясь, вводят Фиксипующий зуб 12 рычага 13 в паз 11, запирая тем самым захватную головку 8 от проворота и осуществляя надежную фиксацию ее в шпинделе манипулирующего устройства, и т.д.
Формула изобретения
Манипулирующее устройство, содержащее корпус с расположенным в нем толкателем, установленным в шпинделе с возможностью возвратно-поступательного перемещения, сменную головк с фланцем на ее цилиндрическом хвостовике и механизм ее фиксации на шпинделе, отличающеес я тем, что, с целью повышения эксплуатационных качеств путем обеспечения возможности автоматической смены захватных головок, механизм фиксации выполнен в виде шарнирно установленного и подпружиненного на шпинделе двуплечего рычага, на одном из плеч которого смонтирован ролик, на другом закреплен зуб, а на фланце сменной головки образован паз под этот зуб.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 417272, кл. В 25 J 15/00, 1972.
2.Авторское свидетельство СССР 510363, кл. В 25 J 11/00, 1974.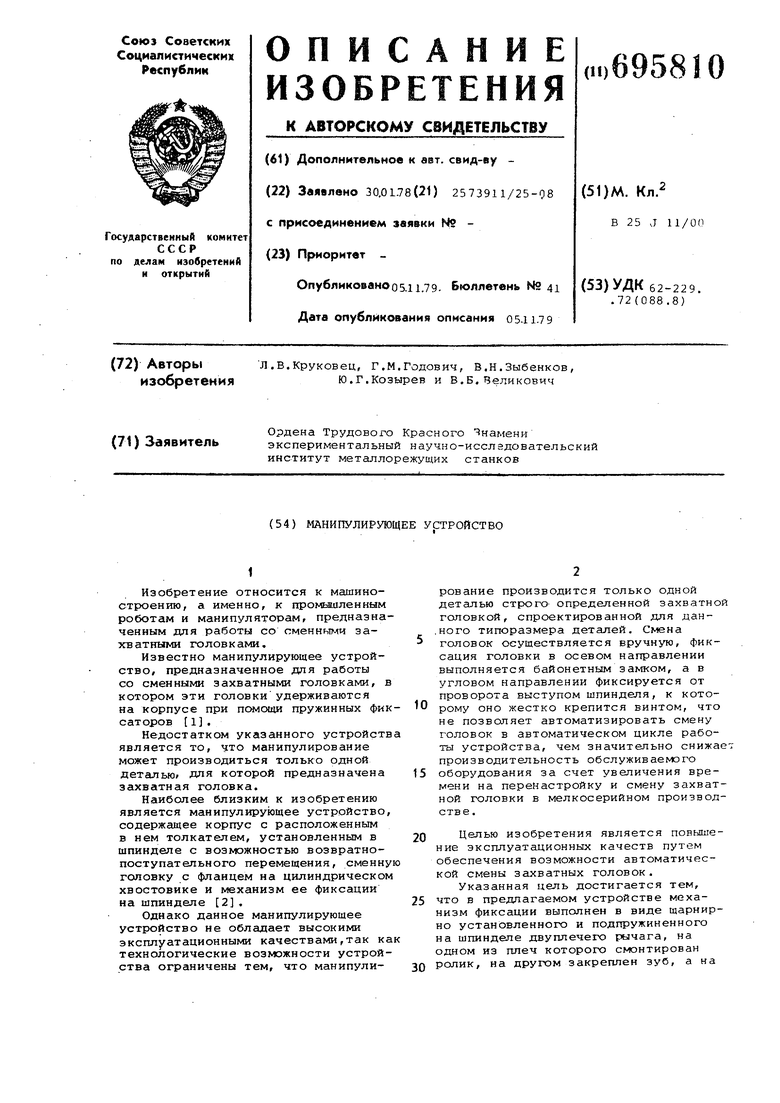

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Многооперационное устройство сАВТОМАТичЕСКОй СМЕНОй иНСТРуМЕНТА | 1978 |
|
SU831487A1 |
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И СМЕНЫ ОПТИЧЕСКИХ ГОЛОВОК ЛАЗЕРНЫХ ТЕХНОЛОГИЧЕСКИХ КОМПЛЕКСОВ | 1988 |
|
RU1568390C |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Манипулирующее устройство | 1974 |
|
SU510363A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Многоинструментальный двусторонний агрегатный станок | 1986 |
|
SU1386415A1 |
| Многоцелевой станок с автоматической сменой инструмента | 1986 |
|
SU1342669A1 |
| Устройство для крепления и смены оптических головок лазерных технологических комплексов | 1990 |
|
SU1796384A1 |