1
Изобретение относится к подъемно--транспортному машиностроению и может быть использовано при построении систем управления движением автоматического транспорта.
Известна система управления движением транспортного средства, в которой блок слежения за трассой с датчиками слежения представляет собой резонансный контур, воспринимающий сигналы, излучаемые уложенным в полу кабелем. В местс1Х разветвлений маршрутов движения установлены датчики-ориентиры. При подходе транспортного средства к разветвлению по сигналу датчика-ориентира в соответствии с программой движения пересматривается резонансная частота датчика слежения и тем Сс1мым выбирается дальнейший маршрут движения по кабелю контура, на частоту которого настройн в данный момент датчик слежения fl .
Наиболее близкой к предлагаемой по технической сущности .является система управления движением транспортного средства, содержащая установленные на транспортном средстве блоки слежения и управления и датчики-ориентиры в местах разветвлений
трассы. Сеть маршрутов в системе стоит из замкнутых контуров, подключаемых к генератору высокой частоты устройствами, установленными в местах разветвлений маршрутов. Срабатывание этих устройств происходит под действием сигналов с транспортного средства в соответствии с заданной . программой движения по сигналам датчиков-ориентиров 2.
Недостатками известных устройств являются создание довольно сложной по исполнению трассы движения (наличие переключающих устройств с их источниками и линиями питания, установка генераторов с различными высокими частотами) и довольно сложное оборудование самого транспортного средства (блоки слежения, оборудованные дополнительными устройствами слежения на различных частотах, установка дополнительных датчиков, установка устройств, воздействующих на переключающие устройства трассы).
Цель изобретения - упрощение выполнения опорной трассы движения и системы управления транспортного движения, а также повышение надежности
30 системы.
Указанная цель досги), тем, что в системе упсаБления дDижeниc транспортного средства, со;держащей устаноБленмыс а транспортном средстве б ж с л t: же н и я и с л о к v п р а в л е t; и я , первые вход и выход которого подключены к выходу и парному входу соответственно б л о к а с л е ж с -и i я ,. а ВТОРОЙ вход связап с датчикг1ми ориентирами, расположеи ь;ми в MOCiax оттзетв;:е-НИИ трасси, а также датчи -: -: сле/кенкя введены ограь ичительные резистивпые элементы и коммутациОКпые элементы , выходы которых coeди:-efl;т соответстве но со вторыми входами блока слежения и с выходами соответствующих отпзаштЧ1гтельных резистивиых элементов , первые входы - с выходами соответствующих датчиков сло; ::о1;;:я л оо вхо;:гами соответстную :;;1Х ;:)ез 1:;г л ,-x ojieMGHтов, а вторые ,од1.; - :- ,.)Т(;р;.,:м;; ai ;ходами уирав/киггил ,
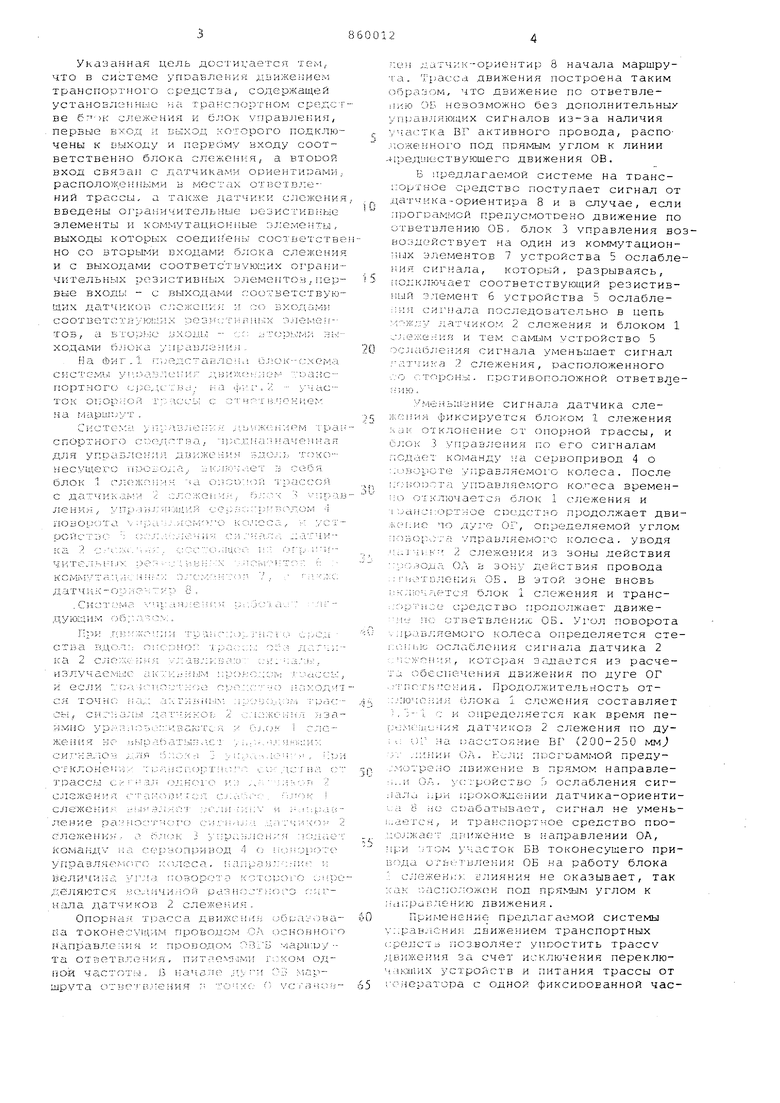
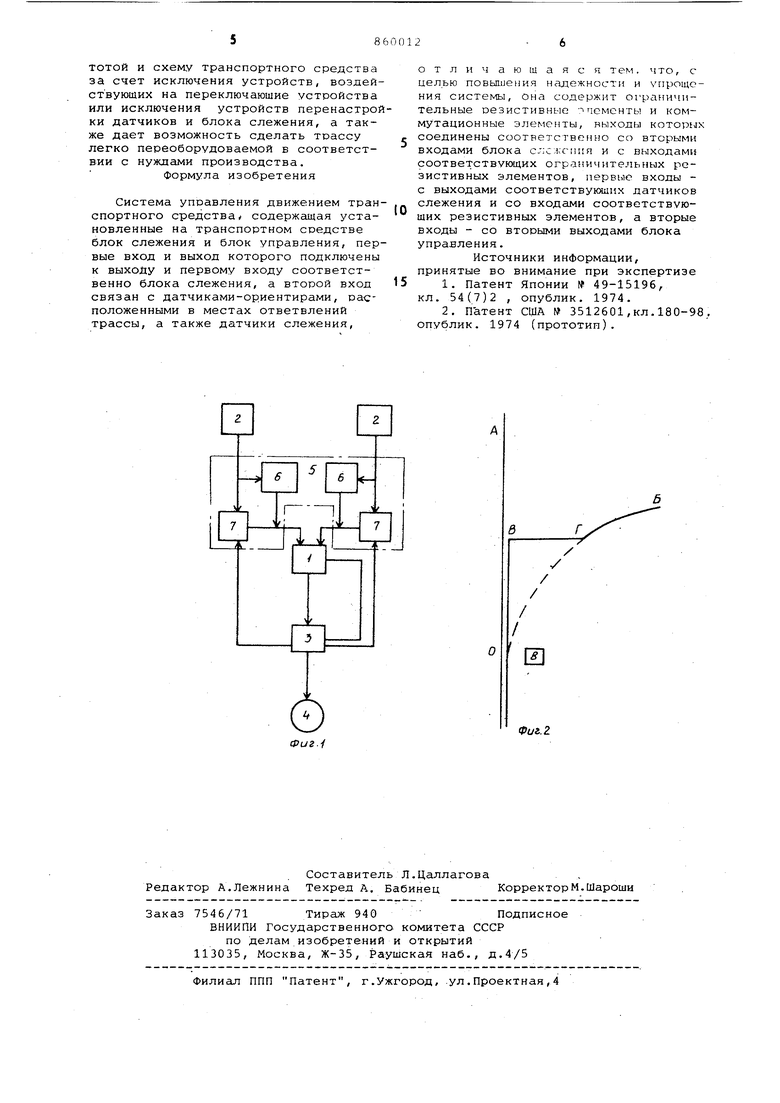
На ©иг. 1 гт;ело анлома ujiOio-cxOMa .c;vii)i ушлатлспиг jViHKei-xer- voancriopTHorcj jj;o, .:; i-; a , x- - ччас-ток опорной г:::т ось; с от чг-т в.г;oниe на г.1арип-)ут .
Сг:отс;.:а у пу а:;;п:л;::я л, iji:: }«-:)(-M ipaiс порт и о го с;..; ipiyyiia: г-алепнал
для упраз; СНИ;; движения БЛО.М. TOKCV-несущего iipo-ода,: :j :л;:тл.1ет з себя блок 1 с- -;ожппмн ча трассой
и аолТлЮ а. к.L-л.;MJM : Пи если :vs;-: ллioc-x;e ni, с:я точгК ; нал а. г;-;в1(м%
ими о не :;ыр:о и:т; ал о ч /.:.ля
ОТКЛОНеПЛ- Л-,:
трассы с;: aj; с.тоже рл я V. ли-о )л г слежени;- -L--rrj леиие ра:л1оо.:к.То слеже1П-д ;, а 6л.л
деляются .y(/iii4i-iaoH рази нала датчиков 2 слежеки Опорна;{ Tijacca движс tia токонесугцлм проводом направления и проводом Та отзетвленр-гя, питае- л iioa; чаотот:-, в начале д шрута с)тветвления г; лоч
датчи -ориоьтир 6 начала маршруТрсЮса движения построена таким зом, что движение по ответвлеОЕ; невозможно без дополнительных т ляющих оигналов из-за наличия тка ВГ активного провода, распоьного под прямым углом к линии .шествующего движения ОВ, -J предлагаемой системе на транс;ное средство поступает сигнал от п--:ка-ориентира 8 и в случае, если лэаммой предусмотрено движение по ггвлению ОБ. блок 3 управления воюйотвует на о;дин из коммутационэлементов 7 устройства 5 оолаблесигнала, который, разрываясь, ;лючает соответствующий резистинэлемент б устройства 5 оолаблеоигнала последовательно в цепь :у л.атчиком 2 слежения и блоком 1 сеглгя и тем с:амым устройотво 5 сигнала уменьшает сигнал ;иг:а 2 слеж;ения, расположенного :тпроны. противоположной ответвлеуменьшение сигнала датчика оле)т;ния фиксируется блоком 1 слежения :-, отклоь;ение от опорной трассы, и елок 3 управления по его сигналам гтод.лОТ комс.нду сервопривод 4 о Т:В.:.)р.о ге управляемо1о колеса. После ;:оч;оо-т.гл упаав тяемого колеса временно ol ключается блок 1 слежения и 1 ;;анс;;орт: ое спс дстао продолжает двиT.OfiHe по луте ОГ, ог;ределяемой углом ;io;i(jp,; j-a /правляемого колеса, уводя олч, к- 2 CJseKeHHH из зоны действия розода ОД в зону действия провода : : 11етп;;ения ОБ, В этой зоне вновь зчлк/ч четоя блок 1 слежения и транс:;;;р-гмсе с;редство продс тжает движеjic глветвленил ОБ. УЧол поворота гв.чяемого колеса определяется степзс ослабле}1ия сигнала датчика 2 .№-пн-;и, которая задается из раочеОбеспе {с; -1ия движения по дуге ОГ iCTji . Пpo oлжитeльi ooть отзче:;И} блока 1 слежения составляет ; 1 . и О 1ределяется как время пеu-;j:e4;-iH дат--;икот 2 слежения по дуиГ на иасотояние ВГ (200-250 мм} Oh. Кс-Пи п1: Огоаммой предудВг жение в прямом направлеус; .-ройство Г) ослабления сигпрохож. датчика-ориентиС1)ибатывает, сигнал не уменьи тран 7Г10ртное средство поо.гпижение в -направлении ОА,
;;« П1,;и .ТОМ участок БВ токонесущего привода отьетвлеьшя ОБ на работу блока :: слежен : : ВЛИЯНИЯ не оказывает, так :сак ::асположен под прямым углом к ;;а;:рсдслению движения.
Применение предлагаемой системы ;:равлонии движеьзием транспортных cpejJOTLo позволяет упс-остить трассу д.Блжения Зс1 счет исключения переклюlaraisHx устройств и питания трассы от гснератора о одной фиксированной частотой и схему транспортного средства за счет исключения устройств, воздействующих на переключающие устройства или исключения устройств перенастройки датчиков и блока слежения, а также дает возможность сделать трассу легко переоборудоваемой в соответствии с нуждами производства.
Формула изобретения
Система управления движением транспортного средства/ содержащая установленные на транспортном средстве блок слежения и блок управления, первые вход и выход которого подключены к выходу и первому входу соответственно блока слежения, а второй вход связан с датчиками-ориентирами, расположенными в местах ответвлений трассы, а также датчики слежения.
отличающаяся тем. что, с целью повышения Нсхдежности и STipoiueния системы, Она содержит orpafmnnтельные резистивные .пемснты и коммутационные элементы, выходы которых соединены соответственно со вторыми входами блока с-;с:) и с выходами соответствующих ограничительных резистивных элементов, первые входы с выходами соответствующих датчиков слежения и со входами соответствующих резистивных элементов, а вторые входы - со ВТОРЫМИ выходами блока управления.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии № 49-15196, кл. 54(7)2 , опублик. 1974.
2,Патент США № 3512601,кл.180-98 опублик. 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
| Система управления движением транспортного средства | 1977 |
|
SU697980A1 |
| Система управления движением транспортного средства | 1976 |
|
SU627450A1 |
| Система управления движением транспортного средства | 1984 |
|
SU1228081A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1469499A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU682937A1 |
| Устройство управления транспортного средства | 1986 |
|
SU1472876A1 |
д
Фиг. 2
