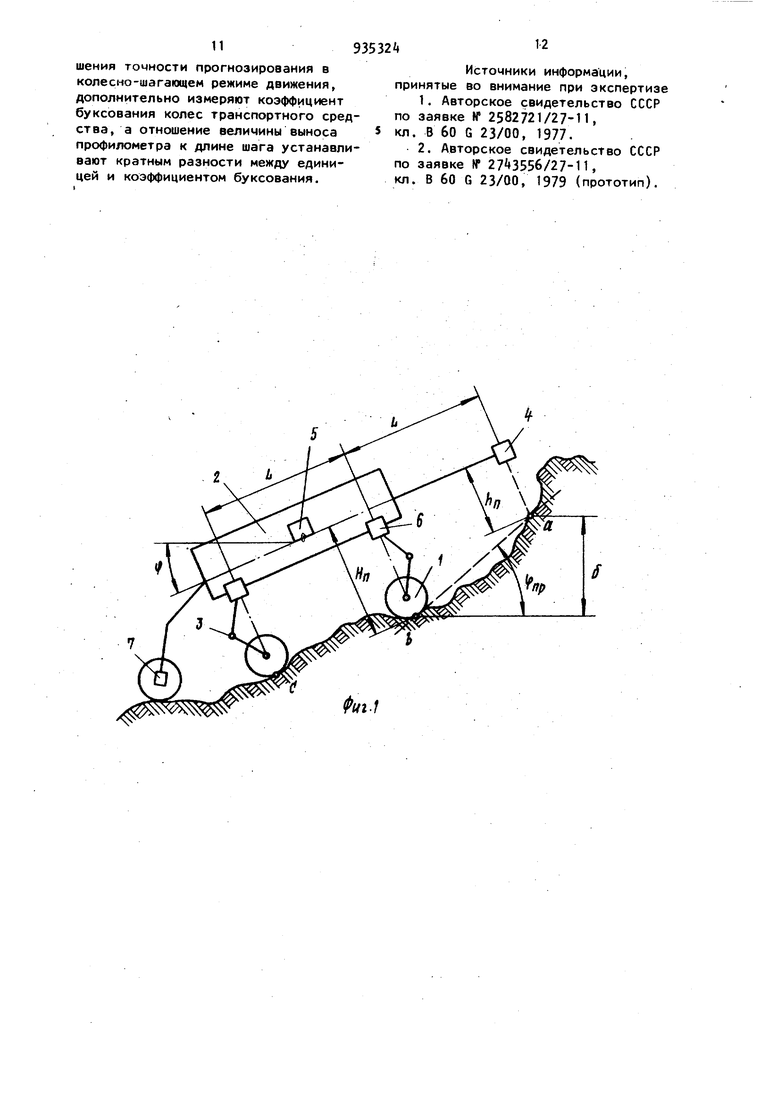
(S) СПОСОБ ПРОГНОЗИРОВАНИЯ ПОЛОЖЕНИЯ Изобретение относится к информационным системам, которые определяют параметры движения транспортных средст и может быть применено для обеспечения безопасности автоматических и полуавтоматических транспортных средств Известен способ прогнозирования положения транспортного средства, ос нованный на обработке информации, по ступающей от датчиков крена, дифферента, лазерного дальномера и хода колес. Преимущество этого способа состоит в TOMJ.4TO он позволяет производить прогнозирование положения транспортных средств с эластичной подвеской tl . Однако этот способ может привести к большой погрешности, если производится прогнозирование положения транспорт ного средства, оборудованного колесно-шагающим движителем в колесно-шагающем режиме. Наиболее близким к изобретению по технической сущности является спо ТРАНСПОРТНОГО СРЕДСТВА соб прогнозирования положения транспортного средства с колесно-шагающим движителем, основанный на обработке информации, поступающей от датчиков хода колес, гировертикали и профилометра, вынесенного перед транспортным средством. Преимуществом этого способа является то, что он позволяет производить прогнозирование положения транспортного средства в колесно-шагающем режиме 123. Однако прогнозирование с помощью этого способа происходит с погрешностью, если движение транспортного средства в колесно-шагающем режиме сопровождаете буксованием. Цель изобретения - повышение точности прогнозирования положения транспортного средства в колесно-шагающем режиме движения. Цель достигается тем, что дополнительно измеряют коэффициент буксования колес транспортного средства, а отношение величины выноса профилометра к длине шага устанавливают кратным разности между единицей и коэффициентом буксования. На фиг. 1 показан принцип работы обеспечения прогнозирования положения транспортного средства; на фиг. 2 транспортное средство в момент времени, когда оно перешло в режим колесно-шагающего движения; на фиг. 3 то же, после того момента, когда в режи-ме колесного шагания оно сделало один шаг, равный L/(1-5)2; на фиг. k - то же, после того момента, когда в режиме колесного шагания оно сделало два шага, каждый по L/(1-5)2 на фиг. 5 - то же, после того момента времени, когда в режиме колесного шагания оно сделало один шаг на фиг. 6 - то же, 2 (Т-5) после того момента времени, когда в режиме колесного шагания оно сделало два шага, каждый по 2(1-5) Транспортное средство (фиг. 1) со держит колеса 1, которые укреплены к корпусу 2 транспортного средства с помощью механизмов шагания 3-о Кроме того, на транспортном средстве установлены профилометр 4, гировертикаль датчик вертикального хода 6 колес 1 и датчик буксования 7. Передвижение в колесно-шагающем режиме осуществляется следующим обра зом. Сначала мз какого-то исходного по ложения, например из положения, пока занного на фиг. 2, все колеса 1 в определенней последовательности при неподвижном корпусе 2 машины с помощью механ|1змов шагания 3 перемещают вперед по направлению движения на величину luara. После завершения перемещения последнего колеса производят перемещение корпуса 2 вперед на величину этого шага относительно неподвижных на t рун1е колес 1. Далее цикл передвижения повторяется. Поэто му, если бы в процессе передвижения .транспортного средства внешние силы (сопротивления движению) отсутствова ли, то в конце первого цикла передви жения колеса окалллись бы на грунте в положении, указанием на фиг. 3 (по ложение когк;м; показано пунктиром) , т.е. nepenf. Т1-(лис ь бы на величину 93 t4 шага 5л . Однако в реальных условиях передвижения и транспортное средство должно реализовывать некоторую силу тяги на крюке, которая может идентифицироваться, например, составляющая веса G машины на уклоне oL , т.е. Рцр GsinoL .Поэтому предвижение транспортного средства осуществляется так, что при реализации силы КР с)леса юзят по грунту в сторону, противоположную движению, что приводит к уменьшению шага перемещения колес в каждом цикле передвижения (см. фиг. 3), который с учетом буксования колес равен 5 (1-5) , где 5 длина шага без буксования; 5 - коэффициент буксования. В соответствии с фиг. 35 0,25В общем случае изменение 5 в каждом цикле определяется изменением внешних условий передвижения. Передвижение в колесном режиме осуществляется при заторможенных механизмах шагания 3 путем приведения во вращение колес. На фиг. 1 показано транспортное . средство с приборами, необходимыми для пояснения ,принципа и работы обеспечения прогнозирования положения транспортного средства. Рассмотрим случай, когда движение транспортного средства происходит в колесном режиме и профилометр k вынесен от оси переднего колеса 1 на величину, равную длине колесной базы транспортного средства L. Вынос профилометра на такое расстояние перед транспортным средством, когда движение его происходит в колесном режиме, позволяет существенно упростить обработку информации-и повысить точность прогнозирования. Из фиг. 1 видно; что в момент времени, когда колеса транспортного средства контактируют с опорной поверхностью в точках вис, может быть спрогнозировано положение транспортного средства, когда его переднее колесо из точки в перемещается в точку d а заднее - из точки с в точку В . ЧтЪбм спрогнозировать положение транспортного средства, например, по угловому положению в вертикально продольной плоскости необходимо определить угол наклона прямой, проходящей через тдчки 6 и с( . Из фиг. 1 видно, что перепад высот неровностей рельефа с между точками 6 и d может быть определен из соотношенияh cosMсЛ HnC05Lf+ Lsintf где Н. Н +ЛР- расстояние от точки контакта переднего, например, правого колеса с опорной поверхностью до прямой, проведенной через профиломегр параллельно продольной оси транспортного средства; высота крепления профилометра, измеренная в статическом положении транспортного средства на нулевом уклоне; текущая величина вер тикального хода (перемещения) переднего например, правого ко леса 1, измеренная датчиком хода колеса текущее расстояние, измеренное правыц пр филометром k, до про филя местности; текущий угол наклона транспортного средст ва в вертикально-про дольной плоскости, измеренный гироверти калью 5; L - колесная база. Из фиг. 1 видно, что прогнозируемый угол наклона транспортного сред ства ,p в вертикально продольной плоскости, например, по правому борту может быть определен из соотношениямежду точ ками В и а Аналогичным образом может быть по лучено выражение /у1я прогнозирования угла наклона транспортного средства по левому борту, а также для прогнозирования положения транспортного средства в вертикально-поперечной плоскости. Таким образом, измеряя с 9 помощью профилометра k текущее расстояние hp до рельефа, а с помощью гировертикали 5 и датчиков хода колес 6 соответственно текущие угол наклона V и ход колеса Др транспортного средства, по выражению (2) может производиться прогнозирование положения транспортного средства в темпе его движения. Поскольку при движении транспортного средства в колесном режиме расстояние между колесами сохраняется постоянным, равным L,до после того, как переднее колесо перемещается на расстояние, например, равное х, на такое же расстояние перемещается и второе колесо. Следовательно, если движение транспортного средства происходит в колесном режиме, то наступает такой момент времени, когда ось переднего колеса располагается над точкой л , а заднего - над точкой в . Поэтому через некоторый промежуток времени транспортное средство оказывается на угле наклона поверхности, который прогнозируется по соотношению (2). Если транспортное средство переходит в колесно-шагающий режим, то также необходимо обеспечить такой режим движения, при котором-через некоторый промежуток времени переднее колесо оказалось бы в точке а , а заднее - в точке В . Если это условие не выполняется, то прогнозировать углы наклона поверхности, на которые попадает транспортное средство, невозможно (фиг. 3). Режим движения, при котором через некоторое время передние колеса оказываются в точке d , а задние - в точке В , может . быть обеспечен выбором определенной , величины шага S , при постоянной величине выноса профилометра L; выносом на определенное расстояние профилометра L от передней колесной оси при постоянной величине шага S ; выбором определенной величины шага S f и выносом на определенное расстояние L профилометра. Для того, чтобы при заданной вели,чи«е выноса профилометра определить величину шага или при заданной величине шага определить величину выноса профилометра, находят уравнение, связывающее эти параметры с величиной . буксования. Пусть транспортное средство движется с буксованием, величина которого равна S. Тогда за один шаг, величиной S, транспортное средство проходит расстояние, равное Sov(-s). Поэтому, чтобы через некоторое время переднее колесо транспортного средства оказалось в точке d , а зад нее - в точке В , надо величину шага выбрать так, чтобы значение 5,л(1.5) оказалось кратным величине выноса профилометра L, т.е. ) где S - коэффициент буксовани транспортного средств - целое положительное число. Из последнего соотношения следует что при постоянной заранее заданной величине выноса профилометра величина шага определяется из соотношения (l-S)n а при постоянном (заранее выбранном) шаге вынос профилометра может быть найден из выражения L Sjyv(l-S)n. . (k} Таким образом, если движение тран спортного средства в колесно-шагающем режиме происходит с буксованием то для того, чтобы переднее колесо оказалось в точке Q , а заднее - в точке 6 , т.е. можно было бы прогнозировать положение транспортного сре ства, отношение колесной базы к величине шага должно удовлетворять соотношению- (1-5)п . На фиг. 2 показано положение тран спортного средства в момент перехода в колесно-шагающий режим движения, а на фиг. - движение в колесношагающем режиме. Процесс движения, представленный на фиг. 2-6, рассматривается для дву случаев. Величина выноса профилометра L от передней колс-сной оси задана и при движении остается постоянной. Поэтому попадание транспортного средства в прогнозируемое положение осуществляется з.э гчет выГ)ора шага S .хОпре деленной згшчпиы. Кроме того, предполагается, ТО j.ifiH KeHMe происходит 9 48 с буксованием, которое измеряется с помощью датчика буксования 7. По величине S , а значение л 2. Тогда из (3) находим величину шага при движении с 2(1-5) которым обеспечивается попадание транспортного средства в заданное положение . На фиг. 3 и 4 пунктирной линией показано положение колес транспортного средства в предположении, что движение его происходит без буксования с шагом а сплошной положение, которое занимает транспортное средство, движущееся с буксованием S 25, после того, как сделает один или два шага величиной Из фиг. 3 и 4 видно, что через два шага ось переднего колеса располагается над точкой а , а заднего - над В , т.е. транспортное средство занимает положение, которое прогнозируется по уравнению (2) в момент времени, когда его колесные оси находятся соответственно над точками 6 и с (фиг. 2). Поэтому при таком способе выбора шага появляется возможность производить прогнозирование положения транспортного средства, движение которого в колесно-шагающем режиме происходит с буксованием. Если в колесно-шагающем режиме величина шага выбрана так, что , то прогнозировать углы (1-S)n наклона поверхности, на которые попадает транспортное средство, невозможно. В качестве примера на фиг. 5 и 6 показано движение транспортного средства в колесно-шагающем режиме с шапри буксовании S 25. На фиг . и 6 также, как и на фиг. 3 и 4, показано два положения. Одно из них пунктирными линиями, которое соответствует положению транспортного средства, движущегося без буксования с шагом другое - сплошной линией, соответствующее положению транспортного средс ва, движущегося с буксованием 5 25 и шагом Svv j j-33 видно, что углы наклона, которые прогнозируются по соотношению (2), не соответствуют тем углам, на которые попадает транспортное средство. Действительно, по ле того, как транспортное средство переместилось на один шаг, передние и задние колесаеще не достигают соответственно точек о( и е (фиг. 5), а после того, как транспортное средство переместилось на два шага, его колеса оказываются за точками d и В Однако перед.тем как транспортное . средство перешло в колесно-шагающий режим движения (фиг. 2) с помощью установленных на нем датчиков (профилометр, гировертикаль, датчики вер тикального хода колес), прогнозирует ся угловое положение в предположении что через некоторый момент времени колеса его передних и задних осей окажутся соответственно в точках Я и 6 . Величина шага S задана и в .процессе движения остается постоянной. Измеренное с помощью датчика 7 буксование S-2SI, а значение п 2. Тогда из выражения (4) видно, что профилометр необходимо вынести от пе редней колесной оси на величину L 1,5 Sj/v . Для данного случая процесс движения также может быть проиллюстрирова на фиг. 2-6. При этом на фиг. 2 показано положение транспортного средс ва- в момент перехода в режим колесно го шагания с вынесенным от передней колесной оси профилометром на рассто яние, равное 1,5 S.. Из фиг. 3 и Ц видно, если транспортное средство движется с шагом, равным S, то через два шага оно оказывается на углах наклона поверхности, которые прогнозируются по уравнению (2). На фиг. 5 и 6 показан процесс дви жения транспортного средства с шагом 5 и буксованием 25. Однако профилометр вынесен на расстояние 1,5 S . Поэтому при таком режиме движения прогнозировать будущее положение транспортного средства невозможно. Таким образом, чтобы повысить точ ность прогнозирования углов наклона поверхности при движении транспортного средства в колесно-шагающем режиме с буксованием, необходимо отношение колесной базы L к величине шага 5 выбирать кратным, разности между единицей и коэффициентом буксова.ния S. При этом, чем меньше величина шага 5(шаг уменьшается с увеличением п и уменьшением S), тем в большем числе точек на пути длиной L производится прогнозирование углов наклона поверхности, а следовательно, и транспортного средства. Так при п 2 и буксовании, равном 25%, прогнозирование производится в двух точках. Одна из них расположена на расСТОЯНИИот оси переднего 2(1-S) колеса перед тем, как оно переходит режим шагания, вторая - на расстоянии L от этого положения колеса. В общем случае, ес.г1и величина шага то прогнозирование (1-S)n производится в п точках на пути, равном L. Пр€;дложенный способ позво.ляет производить прогнозирование не только -в колесном, но и в колесно-шагающем режиме движения при наличии буксования, что существенно повышает безопасность движения автономных транспортных средств, например планетоходов. Предлагаемый способ находит применение в автоматических или дистанционно управляемых транспортных средствах, предназначенных для эксплуатации в экстремальных средах, в которых только колесный режим движения не всегда может обеспечить выполнение задач, возложеннь1х на транспортное средство. Формула изобретения Способ прогнозирования положения транспортного средства с колесношагающим движителем методом обработки информации, поступающей от датчиков хода колес, гировертикали и профилометра, вынесенного перед транспортным средством, отличающийся тем, что,- с целью повышения точности прогнозирования в колесно-шагающем режиме движения, дополнительно измеряют коэффициент буксования колес транспортного средства, а отношение величины выноса профилометра к длине шага устанавливают кратным разности между единицей и коэффициентом буксования. 9 Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке № 2582721/27-11, кл. В 60 G 23/00, 1977. 2.Авторское свидетельство СССР по заявке № 27 355б/27-11, кл. В 60 G 23/00, 1979 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| Способ передвижения транспортного средства с колесно-шагающим движителем | 1977 |
|
SU698830A1 |
| Способ передвижения колесно- шАгАющЕгО ТРАНСпОРТНОгО СРЕдСТВАВ КОлЕСНОМ РЕжиМЕ | 1979 |
|
SU800008A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Способ непрерывного передвижения транспортного средства с колесношагающим движителем в колесно-шагающем режиме | 1976 |
|
SU640897A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1979 |
|
SU816855A1 |
| Транспортное средство | 1979 |
|
SU880853A1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |

2
