(54) СПОСОБ ПЕРЕДВИЖЕНИЯ КОЛЕСНО-ШАГАЮЩЕГО ТРАНСПОРТНОГО СРЕДСТВА В КОЛЕСНОМ РЕЖИМЕ
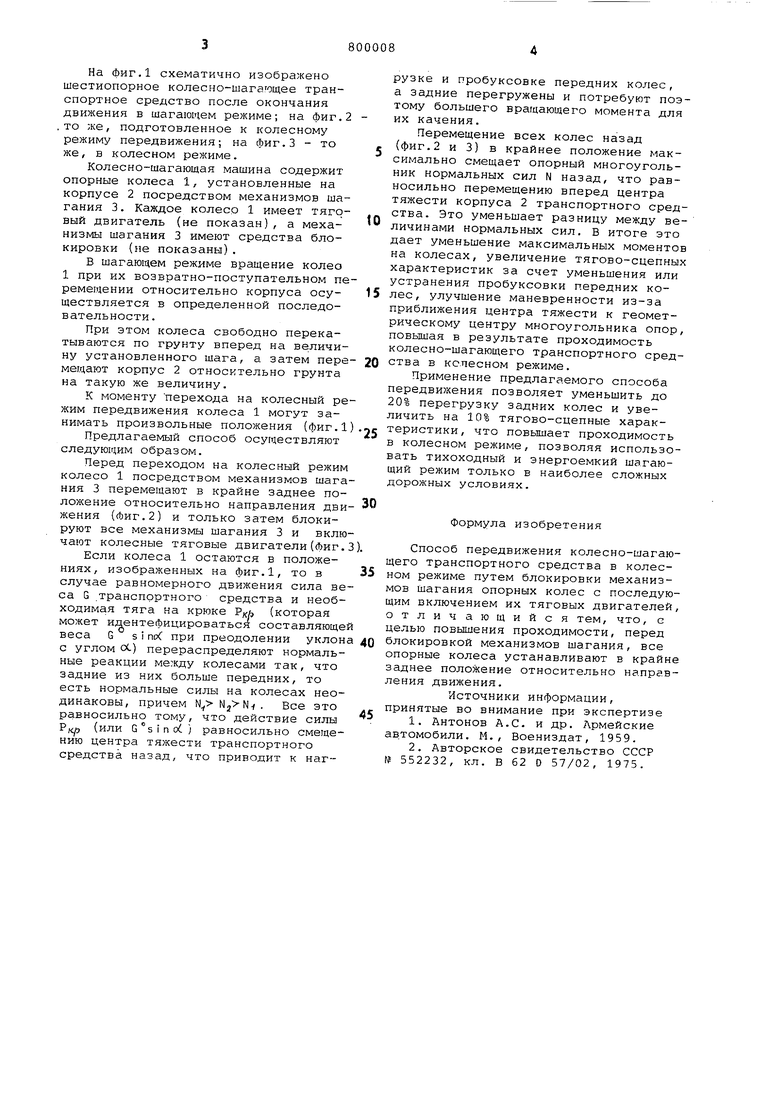
На фиг.1 схематично изображено естиопорное колесно-шагатащее транпортное средство после окончания вижения в шагающем режиме; на фиг.2 о же, подготовленное к колесному режиму передвижения; на фиг.З - то е, в колесном режиме.
Колесно-шагающая машина содержит опорные колеса 1, установленные на корпусе 2 посредством механизмов шагания 3. Каждое колесо 1 имеет тяговый двигатель (не показан), а механизмы шагания 3 имеют средства блокировки (не показаны).
В шагающем режиме вращение колес 1 при их возвратно-поступательном перемещении относительно корпуса осуществляется в определенной последовательности.
При этом колеса свободно перекатываются по грунту вперед на величину установленного шага, а затем перемещают корпус 2 относительно грунта на такую же величину.
К моменту перехода на колесный режим передвижения колеса 1 могут занимать произвольные положения (фиг.1).
Предлагаемый способ осуществляют следующим образом.
Перед переходом на колесный режим колесо 1 посредством механизмов шагания 3 перемещают в крайне заднее положение относительно направления движения (Фиг.2) и только затем блокируют все механизмы шагания 3 и включают колесные тяговые двигатели(фиг.3
Если колеса 1 остаются в положениях, изображенных на фиг.1, то в случае равномерного движения сила веса G транспортного средства и необходимая тяга на крюке (которая может идентефицироваться составляющей веса G s i псхГ при преодолении уклона с углом ОС) перераспределяют нормальные реакции между колесами так, что задние из них больше передних, то есть нормальные силы на колесах неодинаковы, причем . Все это равносильно тому, что действие силы РКЛ (или G sinoi) равносильно смещению центра тяжести транспортного средства назад, что приводит к нагрузке и пробуксовке передних колес, а задние перегружены и потребуют поэтому большего вращающего момента для их качения.
Перемещение всех колес назад (фиг.2 и 3) в крайнее положение максимально смещает опорный многоугольник нормальных сил N назад, что равносильно перемещению вперед центра тяжести корпуса 2 транспортного средства. Это уменьшает разницу между величинами нормальных сил. В итоге это дает уменьшение максимальных моментов на колесах, увеличение тягово-сцепных характеристик за счет уменьшения или устранения пробуксовки передних колес, улучшение маневренности из-за приближения центра тяжести к геометрическому центру многоугольника опор, повьшая в результате проходимость колесно-шагающего транспортного средства в колесном режиме.
Применение предлагаемого способа передвижения позволяет уменьшить до 20% перегрузку задних колес и увеличить на 10% тягово-сцепные характеристики, что повышает проходимость в колесном режиме, позволяя использовать тихоходный и энергоемкий шагающий режим только в наиболее сложных дорожных условиях.
Формула изобретения
Способ передвижения колесно-шагающего транспортного средства в колесном режиме путем блокировки механизмов шагания опорных колес с последующим включением их тяговых двигателей, отличающийся тем, что, с целью повышения проходимости, перед блокировкой механизмов шагания, все опорные колеса устанавливают в крайне заднее положение относительно направления движения.
Источники информации, принятые во внимание при экспертизе
1.Антонов А.С. и др. Армейские ав.томобили. М. , Воениздат, 1959.
2.Авторское свидетельство СССР № 552232, кл. В 62 О 57/02, 1975.
V
/
v:
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Способ передвижения транспортного средства с колесно-шагающим движителем | 1977 |
|
SU698830A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |

x;
№
.A
-,
