1
Изобретение относится к судостро ению.
Известно устройство для спуска и подъема людей и груза с судна на судно в море; включающее в себя стрелу с грузовым канатом, заведенным одним концом на грузовую лебедку, а другим концом посредством соединительного узла и узла компенсации качки, содержащего гидроцилиндр с пневмогидроаккумулятором, связанным с грузовой кабиной Щ .
Недостатком такого устройства является низкая безопасность выполнения спуско-подъемннх операций.
Целью изобретения является повышение безопасности выполнения спуско-гподъемных операций. , Для этого предлагаемое устройство снабжено узлом выборки слабины грузового каната, содержащим вспомогательный канат, подпружиненную гильзу с пазом, электромагнитный фиксатор с рабочим органом, сигнализаторы положения кабины и натяжения грузового каната с электронными блоками реле и источник электрического питания, а соединительный узел содержит захват, шарнирно укрепленный на кабине, и шток, сопрягаемый одним
концом посредством гака с концом грузового каната, а другим концом связанный со вспомогательным канатом, при этом шток гидроцилиндра снабжен на конце подвижной обоймой блоков, жестко прикрепленной к ней, а вспомогательный канат заведен через упомянутые обоймы блоков штока гидроциляндра и кабины и прикреплен к
10 кабине другим концом, причем по,ппружиненная гильза установлена с возможностью . nepeMetaeHiHH в захвате и выполнена сопрягаемой со штоком, электромагнитный фиксатор
15 смонтирован на захвате, а его рабочий орган выполнен сопрягаемым через отверстие, выполненное в корпусе захвата,с пазом подружиненной гильзы, при этом захват снабжен сухарями со штифтами корпус захвата выполнен с пазом, сопря гавмым со штифтами сухарей,а последние установлены с возможностью перемещения в захвате посредством упомянутых
25 паза и штифтов, выполнены сопрягаемыми через прорези, выполненные в подпружиненной гильзе, со штоком и шарнирно связаны посредством тяг с подпружиненной гильзой,причем сигJO нализатор положения кабины и сигнализатор натяжения грузового каната связаны электрическими цепями с электpOHHHivOi блоками реле, а последние соединены электрическими цепям - между собой, с источником электрического питания и с электромагнитным фиксатором. Кроме того, электромагнитный фиксатор содержит электрическую катуку и пружину,а рабочий орган электромагнитного фиксатора выполнен в виде пальца,расположенного внутри электрической катушки и сопряженного с пружной, причем сигнализатор положения кабины выполнен в виде акселерометра, а сигнализатор натяжения грузового каната выполнен в виде тензорезистора, смонтированного на штоке.
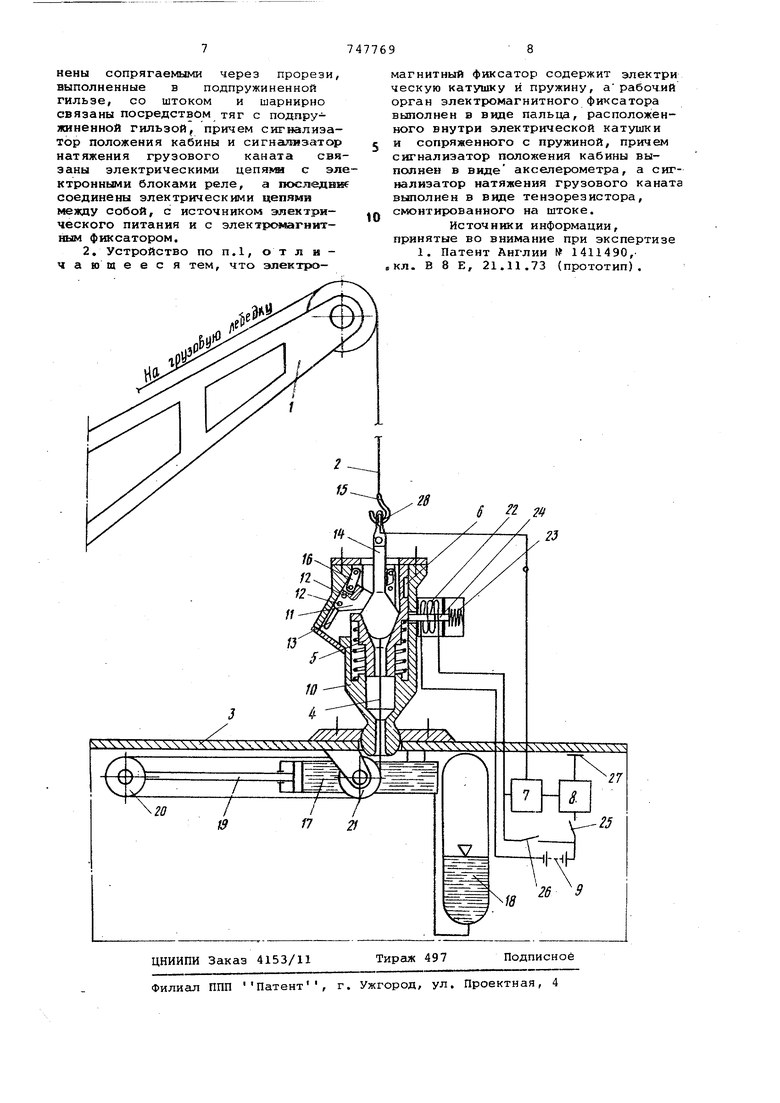
На чертеже представлено предлагаемое устройство.
Устройство содержит стрелу 1 с грузовым канатом 2,заведенным одним кондом на грузовую лебедку, а другим посредством соединительного узла и узла компенсации качки связанным с грузовой кабиной 3, Устройство снабжено узлом выборки слабины грузового каната, содержащим вспомогательный канат 4,подпружиненную гильзу 5 с пазом 6,электромагнитный фиксатор с рабочим органом, сигнализатор, положения кабины 3 и натяжения грузового каната 2 с электронными блоками реле 7 и 8 и источник 9 электрического питания,, Соединительный узел выполнен быстроразъемным и содержит захват, состоящий из корпуса 10, шарнирно закрепленного на кабине 3, размещенных на равных расстояниях и по окружности корпуса сухарей 11 со штифтами 12, сопрягаемыми с пазом 13 корпуса, и шток 14, сопрягаемый одншл концом посредством гака 15 с грузовы канатом 2, а другим концом сзязанным со вспомогательным канатом 4, Сухари 3-1 тягами 16 шарнирно св)заны с подпружиненной гильзой 5 и через выполненные в ней прорези могут сопрягаться со штоком 14.Узел компенсации качки содержит гидроцилиндр 17 с пневмргидроаккумулятором 18, Шток 19 гидроцилиндра снабжен подвижной обоймой 20 блоков,а к кабине 3 жестко крепится обойма 21 блоков. Связанный одним кондом со штоком 14 вспомогательный канат 4 огибает обе обоймы блоков и крепится другим концом к кабине 3. Электромагнитный фийсатор смонтирован на корпусе 10 захвата и содержит электрическую катушку 22 и пружину 23, а его рабочий орган выполнен в виде пальца 24, расположенного внутри электрической катушки и сопряженного с пру жиной. Через отверстие,выполненное в корпусе 10 захвата,палец 24 прижимается пружиной 23 к гильзе 5 и при ее перемещении относительно корпуса вниз сопрягается с пазом 6. КаTyujKa 22 фиксатора соединяется с источником 9 питания через блоки реле 7 и 8 и контакты 25 или напрямую через контакты 26, Сигнализатоо положения кабины 3 выполнен, например, в виде акселерометра 27, а сигнализатоо натяжения грузового каната 2 - в виде тензорезистора 28, смонтированного на штоке 14.
Устройство работает следующим образом.
Перед началом работы кабина 3 находится на палубе передающего судна. Впневмогидроаккумуляторе 18 а следовательно, и в поршневой полости гидроцилиндра 17 создается давление, необходимое для поддержания во вспомогательном канате 4 натяжения, достаточного для перемещения подпружиненной гильзы 5 в нижнее положение.Гильза 5 перемещается вниз относительно корпуса 10 захвата. Движение гильзы через тяги 16 передается сухарями 11, которые уходят в прорези гильзы в результате перемеще {ия штифтов 12 по пазам 13. Под действием пружины 23 палец 24 заходит в паз 6 гильзы 5.Гак 15 соединяется с подъемным штоком 14. Замыка-нием контакта 26 подается питание на катушку 22 электромагнитного фиксатора. При этом палец 24 перемещается вправо, преодолевая сопротивление пружины 23, и выходит из паза 6,гильзы 5. Грузовая лебедка включается на подъем. После выборки слабины грузового каната 2 шток 14 начинает перемещаться вверх, вместе с ним перемещается подпружиненная гильза 5. При этом сухари 11, увлекаемые тягами 16, в;аходят из прорезей гильзы 5 и сопрягаются со штоком 14,удерживая его в захвате. Кабина 3 поднимается над палубой передающего судна, выносится а борт и ориентируется над соответствующим участком палубы принимающего судна. Контакт 26 при этом размыкается и катушка 22 обесточивается.Грузовая лебедка включается на спуск. Момент посадки кабины на палубу принимающего судна, совершающего вертикальные (перемещения обусловленные качкбй,сопровождается некоторым ударом, для смягчения которого в днище кабины могут быть встроены пневматические амортизато.ры. .В момент касания в грузовом канате 2 образуется слабина. При этом узел выборки кабины грузового каната обеспечивает разобщение соединительного узла и введение в,действие узла компенсации качки, через который шток 14 соединяется с кабиной 3.
Под воздействием натяжения вспомогательного каната 4 гильза 5, преодолевая сопротивление пружины, перемещается вниз, сухари 11 уходит в прорези гильгы, освобождая шток 14, а палец 24 электромагнитного фиксатора заходит в паз 6, обеспечивая фиксацию гильзы в нижнем положении. Дальнейшие перемещения кабины 3 вместе с качающейся палубой принимающего судна относительно штока 14 компенсируются узлом компенсации качки. Работа грузовой лебедки на спуск продолжается до появления в грузовом канате 2 слабины, превышающей обусловленные качкой максимальные взаимные перемещения нока стрелы 1 и палубы принимающего судна вместе с кабиной 3. При этом шток 14 будет прижат к находящейся в крайнем нижнем положении гильзе 5 натяжения каната 4.
Перед началом подъема грузовая лебедка включается на выборку грузового каната 2. Замыканием контакта 25 узел выборки слабины грузового каната готовится к введению сухарей 11 в сопряжение со штоком 1 и съему кабины 3 с качающейся палубы принимающего судна в наиболее благоприятный момент. Таким моментом является нахождение кабины 3 вместе с палубой принимающего судна в верхнем положении в ходе их вертикальных перемещений в условиях качки при отсутствии слабины грузового каната 2.Выбирается слабина грузового каната 2,причем первоначально в момент нахождения кабины 3
вместе с принимающим судном в нижнем положении. При этом грузовой шток 14 отходит от гильзы 5 на некоторое расстояние.
При последующем перемещении-палубы принимающего судна с кабиной 3 вверх слабина образована вновь и шток под воздействием вспомогательного каната 4 и гидроцилиндра 17 .занимает прежнее положение. При дальнейшей выборке грузового каната 2 амплитуда перемещений грузового штока 14 относительно корпуса 10 увеличивается и по истечении некоторого времени наступает момент, когда при нахождении кабины вместе с палубой принимающего судна в верхнем положении в процессе их совместных перемещений при качке слабины в грузовом канате 2 не образуется. При этом от акселерометра 27 на электронный блок реле 8 поступает соответствукщнй электрический сигнал, свидетельствующий о прохождении принимающим судном вместе с кабиной 3 верхнего положения, а от тензорезистора 28 на электронный блок реле 7 поступает электрический сигнал, свидетельствующий о наличии натяжения грузового каната 2, Оба реле одновременно срабатывают и замыкают цепь питания катушки 22 элек
тромагнитного стопора. Палец 24, преодолевая сопротивление пружины 23, перемещается вправо и выходнт из паза б гильзы 5. в начальный момент последующего перемещения палубы принимающего судна вниз шток 14 начинает перемещаться относительно корпуса 10 вверх. Вместе с ним перемещается гильза 5, увлекающая за собой сухари 11, которые выходят ИЗ прорезей гильзы и сопрягаются со штоком 14. Кабина 3 отделяется от палубы принимаквдего судна и ее дальнейший подъе осуществляется грузовой лебедкой.
15
Формула изобретения
1. Устройство для спуска и подъема людей и грузов с судна на судно
20 в море, включающее стрелу с грузовым канатом, заведенным одним концом на грузовую лебедку, а другим концом посредством соединительного и узла компенсации качки,содержа5 щего гидроцилиндр с пневмогидроаккумулятором, связанным с грузовой кабиной, отличающееся тем, что с целью повышения безопасности выполнения спуско-подъемных опера30 или, оно снабжено узлом выборки слабины грузового каната, содержащим вспомогательный канат, подпружиненную гильзу с пазом, электромагнитный фиксатор с рабочим оргаc ном, сигнализаторы положения кабины и натяжения грузового каната с электронными блоками реле и источник электрического питания, а соединительный узел содержит захват, шарнирно укрепленный на кабине, и
0 шток, сопрягаемый одним концом посредством гака с концом грузового каната, а другим концом связанный со -вспомогательным канатом, при этом шток гидроцилиндра снабжен на 5 конце подвижной обоймой блоков, кабина снабжена обоймой блоков, жестко прикрепленной к ней а fвcпo эгaтельный канат заведен через упомянутые обоймы блоков штока гидроцилин0 дра и кабины и прикреплен к кабине другим концом, причем подпружиненная гильза установлена с возможностью перемещения в захвате и выполнена сопрягаемой со штоком, электромаг5 нитный фиксатор смонтирован на захвате, а его рабочий орган выполнен сопрягаемым через отверстие, вьтолненное в корпусе захвата, с пазом подпружиненной гильзы, при этом за0 хват снабжен сухарями со штифтами, корпус захвата выполнен с пазом, сопрягаемым со штифтами сухарей, а последние установлены с возможностью перемещения в захвате посредством
5 упомянутых паза и штифтов, выпол
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1975 |
|
SU695891A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Судовое устройство для передачи грузов и пересадки людей в море | 1989 |
|
SU1615042A1 |
| Судовое грузовое устройство | 1974 |
|
SU514743A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
