(54) МАШИНА ДЛЯ НЕПРЕРЬЮНОЙ ВИБРАЦИОННОЙ ОБРАБОТКИ ДЕТАЛЕЙ
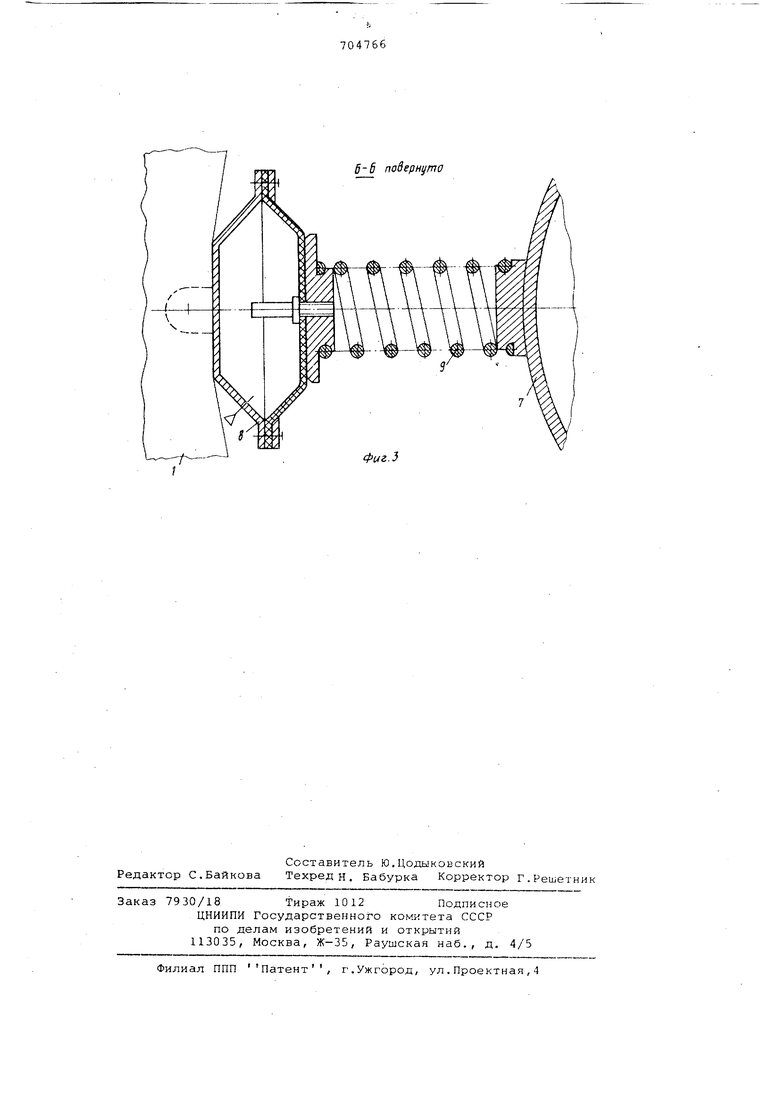
на фиг. 3 - поперечный разрез упруго элемента Б-Б на фиг. 1.
Машина состоит из рамы 1, упруго подвешенной на станине 2 при помощи пневмобаллонов 3. Вдоль рамы 1 установлены вибраторы 4,. соединенные посредством муфты 5 с электродвигателем 6. На раме 1 установлены рабочие камеры 7 при помощи упругих элементов, состоящих из пневмокамеры 8 и винтовой пружины 9, Внутри рабочих камер установлены перфорированньае шнеки 10 и 11 и устройства, 12 для отделения обработанных деталей 13 от обрабатываемой среды 14. Шнек 10 - ленточный, а шнек 11 - сплошной. Каждый шнек имеет свой привод 15 и 16. Устройства 12 для разделения содержат винтовые лопасти 17 и перфорированные ковши 18 и жестко соединены со шнеками 10 и 11. Торцовые стенки рабочих камер 7 снабжены загрузочно-разгрузочными окнами 19. Лоток 20 служит для загрузки деталей 21 в первую рабочую камеру, лоток 22 - для перегрузки деталей 13 из одного рабочего органа в другой, а лоток 23 - длявыгрузки готовых деталей в тару.
Вибрационная машина работает следющим образом.
Вибраторы 4, получающие вращательное движение от электродвигателя 6, сообщают раме 1 колебательные движения, которые через упругие элементы регулируемой жесткости 8 и 9 переда ются рабочим органам. В зависимости от жесткости упругих элементов, которая зависит от давления подаваемого воздуха в пневмокамеры, рабочие органы колеблются с разной амплитудои Б противофазе колебаниям рамы 1.
Рабочие камеры 7 заполнены различными рабочими средами {например, верхняя - абразивной средой, а нижняя - ударными телами). По лотку 20 детали 21 поступают сначала в верхнюю камеру и проходят абразивную обработку. Шнек 11с устройством 12 для разделения вращается с регулируемой скоростью при помощи механизма вращения 16 и перемещает детали от загрузочного лотка 20 к устройству для разделения. Лопасти 17, расположенные на конусной поверхности, осуществляют передвижение обработанных деталей 13 к перфорированным ковшам 18, которые, захватывая детали, транспортируют их к перегрузочному лотку 22. Детали в верхней части, двигаясь по обратному конусу ковшов 18, попадают в лоток 22, а оттуда во вторую рабочую камеру 7.
Конусная форма устройства для разделения исключает возможность скопления деталей в листе выгрузки.
а шнек, расположенный в центре серащекия среды загрузки, не дает возможности скапливаться деталям в центре контейнера, так как удельный вес деталей больше удельного веса абразивных гранул.
Детали, попадая во вторую рабочую камеру, проходят. зону обработки (например, упрочнение) и при помощи разделительного уотройства 12 и лотка 23 попадают в тару для готовых деталей. Так как детали имеют удельн вес меньший, чем удельный вес обрабатывающей среды (например, твердосплавные шары), то они находятся возле стенок рабочей камеры, поэтому для их перемещения шнек 10 изготовлен ленточным с зазором между стенками рабочей камеры и шнеком размера деталей. При помощи привода 15 можно регулировать скорость вращения шнека 10, т.е. изменять время нахождения деталей в рабочей камере (производительность процессов) независимо от колебаний рабочей камеры.
Такое выполнение многопозиционной вибрационной машины позволяет осуществлять одновременно различные технологические операции путем сообщения каждой рабочей камере различные по величине амплитуды.
Формула изобретения
1.Машина для непрерывной вибрациной обработки деталей, содержащая упруго установленный на раме контейнер цилиндрической формы с загрузочной и разгрузочной позициями, внутри которого расположено шнековое устройство, обеспечивающее транспортировку и разделение деталей от обрабатывающей среды, отличающаяся тем, что, с целью возможности создания многопозиционной машины, обеспечивающей одновременную обработку деталей в разтичных технологических режимах, рама выполнена в виде нескольких Bi-.ртикально расположенных и упруго установленных
на станине плит с отверстиями, в котрых на упругих элементах, расположенных по всему периметру, подвешены контейнеры, а валы вибраторов расположены в одной горизонтальной плоскости симметрично относительно вертикальной плоскости, проходящей через оси контейнеров.
2.Машина поп.1, отличающаяся тем, что упругие элементы, на которых подвешен контейнер выполнены в виде комбинации диафрагменного пн;5вмопривода с винтовой пружиной .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 323254, кл. В 24 В 31/06, 1970.
S-5 повернуто
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для вибрационной обработки поверхностей | 1972 |
|
SU516515A1 |
| Устройство для непрерывной вибрационной обработки деталей | 1988 |
|
SU1634454A1 |
| Прямоточная вибрационная машина | 1976 |
|
SU660813A1 |
| Виброцентробежная машина для обработки деталей | 1979 |
|
SU861032A1 |
| Машина для непрерывной вибрационной обработки деталей | 1975 |
|
SU529063A1 |
| Машина для непрерывной вибрационнойОбРАбОТКи дЕТАлЕй | 1979 |
|
SU804392A1 |
| Линия для жидкостной обработки | 1988 |
|
SU1620509A1 |
| Вибрационный станок | 1989 |
|
SU1779557A1 |
| Станок для отделки поверхностей деталей частицами сыпучей среды | 1983 |
|
SU1114532A2 |
| Машина для вибрационной обработки деталей | 1980 |
|
SU965735A1 |