i
Изобретение относится к грузоподъемный кранам, преимущественно к козловым кранам с механизмом передвижения грузовой тележки с канатоведущим шкивом.
Известен механизм передвижения грузовой тележки козлового крана, содержащий CMOHTH рованную на раме, установленной на платформе грузовой тележки, лебедку с канатоведущим щкивом и пружину для натяжения каната 1.
Однако известный механизм передвижения грузовой тележки сложен в изготовлении и имеет значительные габариты канатоведущего щкива с конусоидальным профилем; кроме того сложность обеспечения постоянного значительного натяжения тягового каната приводит к значительному износу йжива и каната за сче проскальзывания последнего при пуске.
Цель изобретения - упрощение конструкции и повыщение надежности работы механизма.
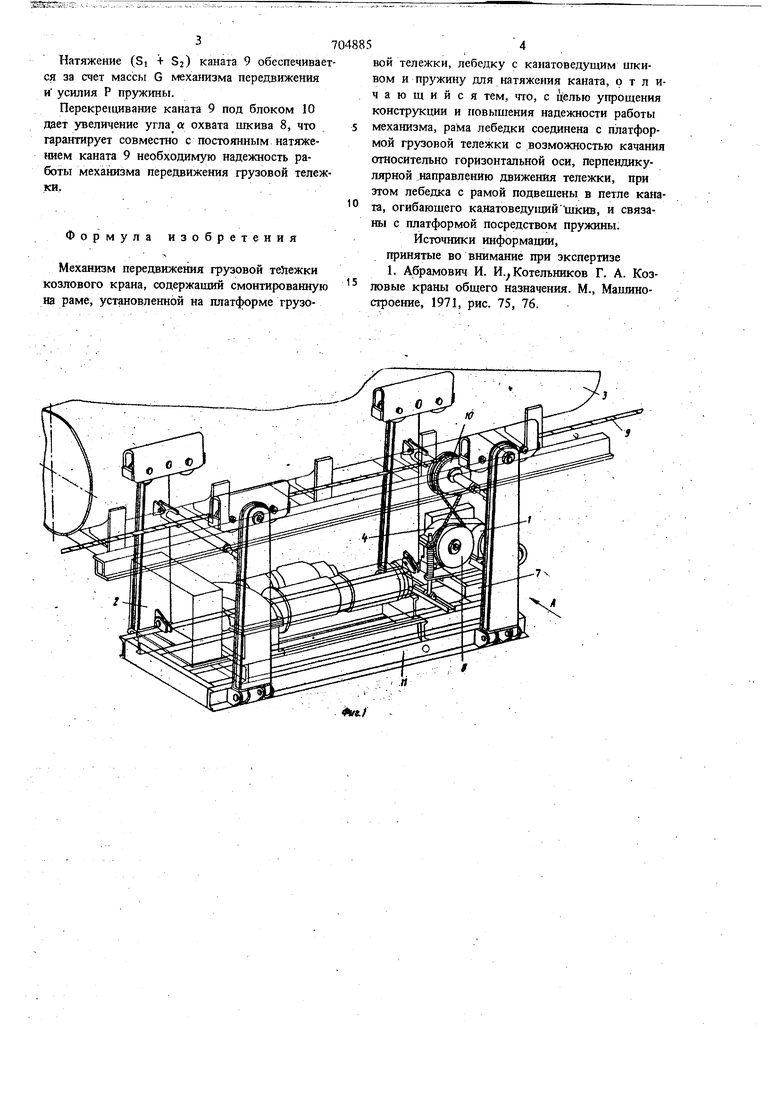
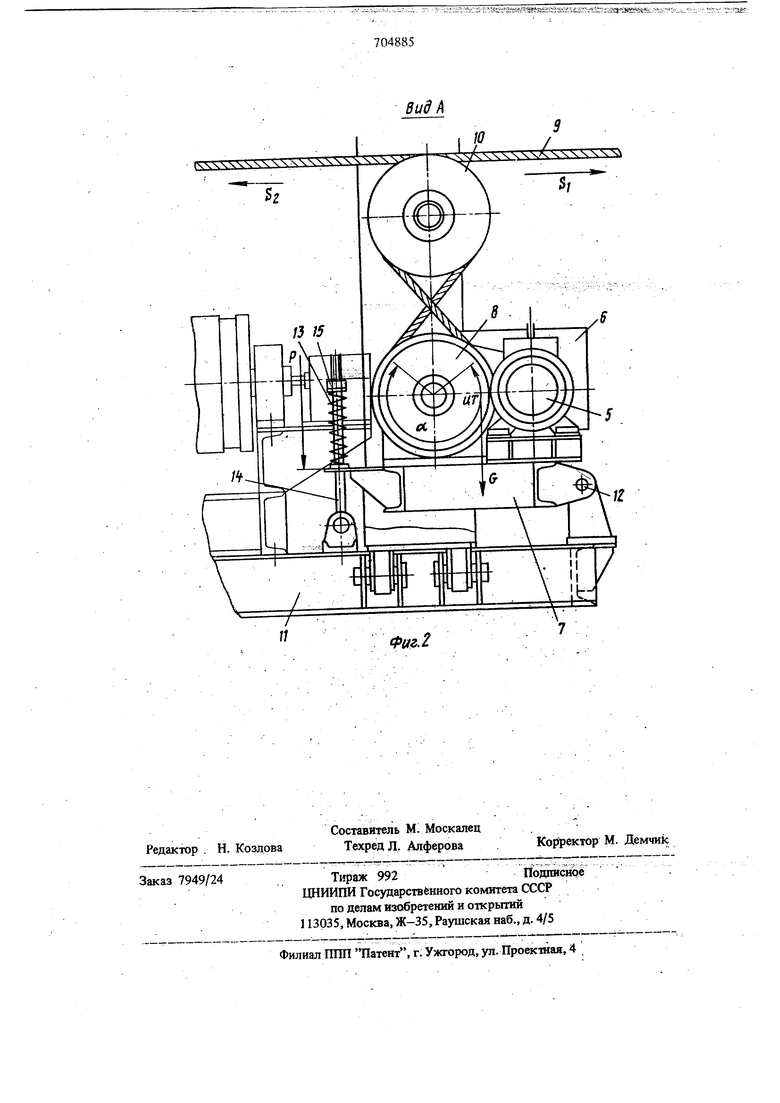
Для этого рама лебедки соединена с платформой грузовой тележки с возможностью качания относительно горизонтальной .оси, перпендикупярной направлению движения тележки, при этом лебедка с рамой подвешены ..в петле каната, огибающего канатоведуищй шкив, и связаны с платформой посредством пружины. На фиг. 1 показан механизм передвижения, установленный на грузовой тележке аксонометрии, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1.
Меха(газм 1 передвижения (см. фиг. 1,2) грузовой тележки 2 козлового крана 3 состоит из лебедки, включающей в себя редуктор 4, электродвигатель 5 и тормоз 6, смонтированные на качающейся раме 7. На выходном валу редуктора 4 закреплен канатоведущий шкив 8с клиновь1М ручьем, огибаемый тяговым канатом 9, проходящим через отводной двухручьевой блок 10. Рама 7 закреплена на платформе И тележки 2 с помощью шарнира 12 к подпружинена для обеспечения дополнительного натяжения каната 9 пружиной 13 через шарнирно закрепленнзоо на платформе 11 грузовой дележки 2 тягу 14 с регулировочной гайкой 15.
704885
Натяжение (Si + 82) каната 9 обеспечивается за счет массы G мехшгазма передвижения и усилия Р пружины.
Перекрещивание каната 9 под блоком 10 дает увеличение угла а охвата шкива 8, что гарантирует совместно с постоянным натяжением каната 9 необходимую надежность работы механизма передвижения грузовой тележки.
Формула изобретения
Механизм передвижения грузовой тейежки козлового крана, содержаиога смонтированную на раме, установленной на платформе грузоВОЙ тележки, лебедку с канатоведущим шкивом и пружину для натяжения каната, отличающийся тем, ПО, с целью упрощения конструкции и повышения надежности работы механизма, рама лебедки соединена с платформой грузовой тележки с возможностью качания относительно горизонтальной оси, перпендикулярной направлению движения тележки, при этом лебедка с рамой подвешены в петле каната, огибающего канатоведущийшкив, и связаны с платформой посредством пружины.
Источники информации, принятые во внимание при экспертизе 1. Абрамович И. И. Котельников Г. А. Козловые краны общего назначения. М., Машиностроение, 1971, рис. 75, 76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения основной и дополнительной тележек крана мостового типа | 1982 |
|
SU1104093A2 |
| Кабельный кран | 1981 |
|
SU1020364A1 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| Подвесная канатная дорога маятникового типа | 1982 |
|
SU1165604A1 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| Грузовая тележка для крана мостового типа | 1975 |
|
SU517554A1 |
| Перегрузочное устройство | 1934 |
|
SU45847A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Устройство Лавренова для подъема и транспортирования груза | 1980 |
|
SU977365A1 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1984 |
|
SU1310525A1 |
Ю
I
а
