(54) ТРАНСПОРТЕР АВТОМАТИЧЕСКИ ЛИНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия спутникового типа | 1983 |
|
SU1133070A1 |
| Автоматическая линия для обработки деталей | 1985 |
|
SU1315242A1 |
| Автоматическая линия для механической обработки | 1974 |
|
SU500030A1 |
| Устройство для передачи и фиксации де-ТАлЕй пО пОзицияМ | 1979 |
|
SU835897A1 |
| Транспортер-накопитель | 1977 |
|
SU716922A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Устройство для приема и выдачи штанг на буровом станке | 1974 |
|
SU485217A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1400714A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЕТАЛЕЙ | 1973 |
|
SU426795A1 |
| Транспортное устройство автоматической линии | 1986 |
|
SU1399079A1 |
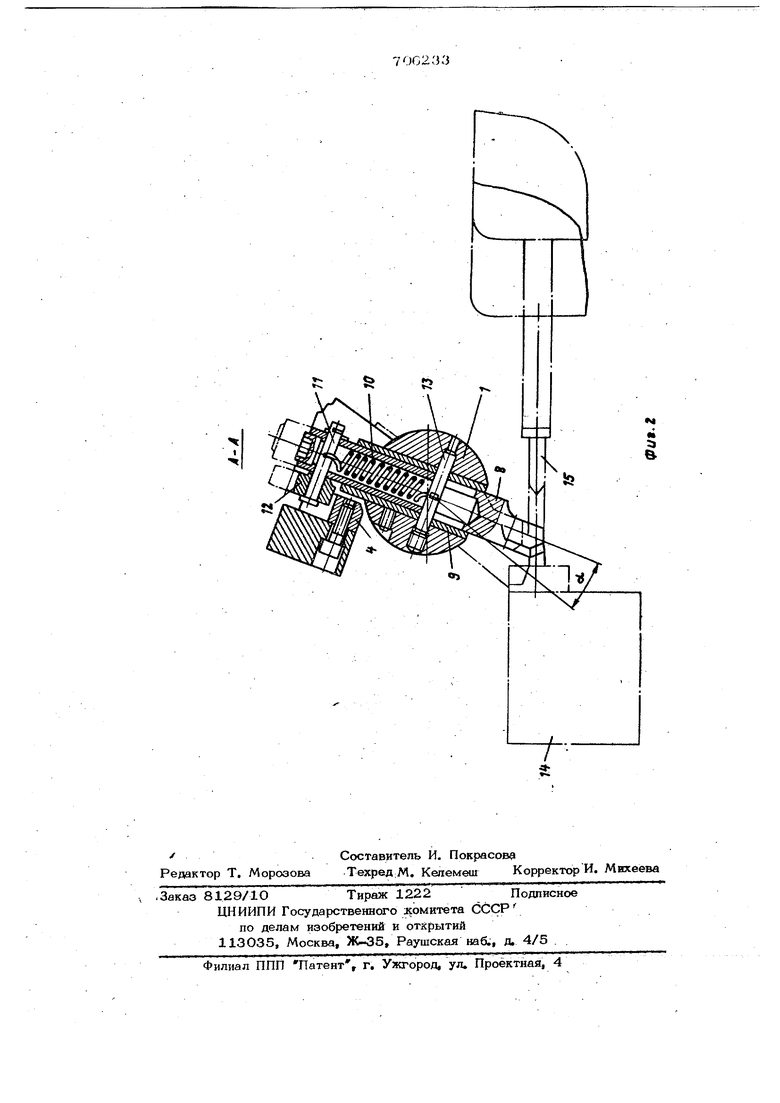
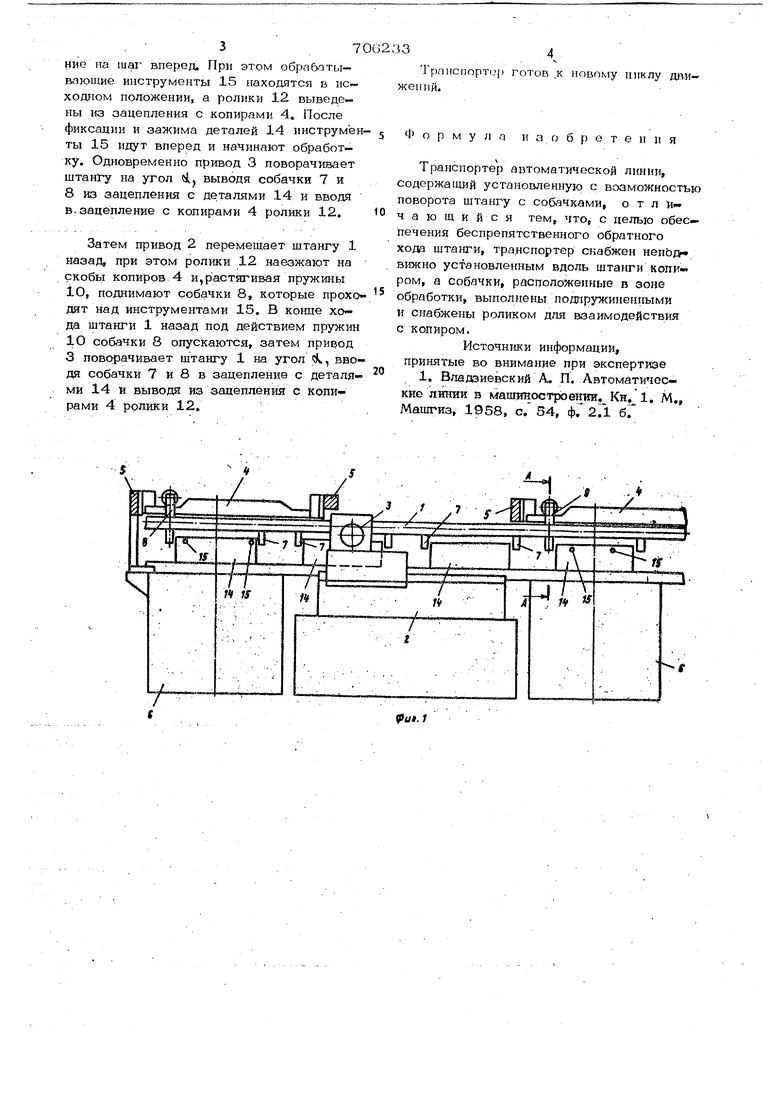
Изобретение относится к транспортным устройствам автоматических линий метал лорежушюс станков, Известны транспортеры с собёчками, жестко закрепленными на поверхностных штангах }. Недостатком таких транспортеров является то, что при обратном ходе штанги СобаЧкй, :вь1ведейные.из зацепления с Транспортируемыми деталями, занимают зону обработки и при пересечении их с обрабатывающим инструментом приходится рабочий ход последних осуществлять только после возврата транспортера в исходное положение. Цель изобретения - обеспечение беспрепятственного обратного хода щтанги. Для этого транспортер снабжен непод вижно установленным вдоль штанги копи ром, а собачки, расположенные в зоне о работки, выполнены подпружиненными и . снабжены роликом для взаимодействия с копиром. На фиг, 1 изображен описываемый транспортер; на фиг. 2 - разрез А-А на фиг. 1, Транспортер содержит штангу 1 с приводами продольного перемещения 2 и поворота 3. Вдоль штанги установлены копиры 4, закрепленные посредством кронштейнов 5 на приспособлениях 6 станков. На штанге 1 размещены жесткие собачки 7, установленные в местах, где надо обходить препятствия, и подвижные собачки 8. Последние устанавливаются в расточках штанги во втулках 9 и в осевом направлении соединяются со штангой через пружину 1О, которая одним концом . закреплена через ось 11 ролика 12 на собачке 8, а другим концом через ось 13 на штагне 1. Транспортер работает следующим образом. Привод 2 через предварительно повернутую на угол с. штангу 1 для ввода в зацепление с собачками 7 и 8 обрабатываемых деталей 14 перемещает послед370
ние на шаг вперед. При этом обраб-зты- впюшие инструменты 15 находятся в исходном ноложении, а ролики 12 выведены из зацепления с копирами 4. После фиксации и зажима деталей 14 инструменты 15 идут вперед и начинают обработку. Одновременно привод 3 поворачивает штангу на угол (Aj выводя собачки 7 и 8 из зацепления с деталями 14 и вводя в. зацепление с копирами 4 ролики 12,
Затем привод 2 перемещает штангу 1 назад, при этом ролики 12 наезжают на скобы копиров 4 и, растягивая пружины iO, поднимают собачки 8, которые проходят над инструментами 15, В конце хо да штанги 1 назад под действием пружин 10 собачки 8 опускаются, затем привод 3 поворачивает штангу 1 на угол , вводя собачки 7 и 8 в зацепление с деталями 14 и выводя из зацепления с копирами 4 ролики 12.
334
Траислорте готов к новому циклу движений.
Формула и а о б р е т е н и я
Транспортер автоматической линии, содержащий установленную с возможность поворота щтангу с собачками, о т л и- чающийся тем, что, с целью обеспечения беспрепятственного обратного хода штанги, тра.нспортер снабжен непЬдг вижно установленным вдоль щтанги копк-. ром, а собячки, расположенные в зоне обработки, выполнены подпружиненными и снабжены роликом для взаимодействия с копиром.
Источники информации принятые во внимание при экспертизе
1, Владзиевский А. П, Автоматические линии в машлностроении,Кн, 1. М., Машгиз, 1958, с. 54, ф, 2.1 б.
I
ч
